TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099339
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023215933
出願日
2023-12-21
発明の名称
多関節ロボット
出願人
株式会社リコー
代理人
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20250626BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】引き出される電線の本数が多いエンドエフェクタであっても交換容易性を確保する。
【解決手段】本発明に係る多関節ロボットは、ロボットアームと、ロボットアームの先端に設けられエンドエフェクタと、エンドエフェクタをロボットアームの先端に取付けるためのヘッドアタッチメント3と、エンドエフェクタと地上側に固定配置された制御盤とを接続する電線13とを有する多関節ロボット1において、エンドエフェクタから引き出された電線と制御盤から引き出された電線とを接続するための接続部(端子台51)が、ヘッドアタッチメント3と一体化されていることを特徴とする。
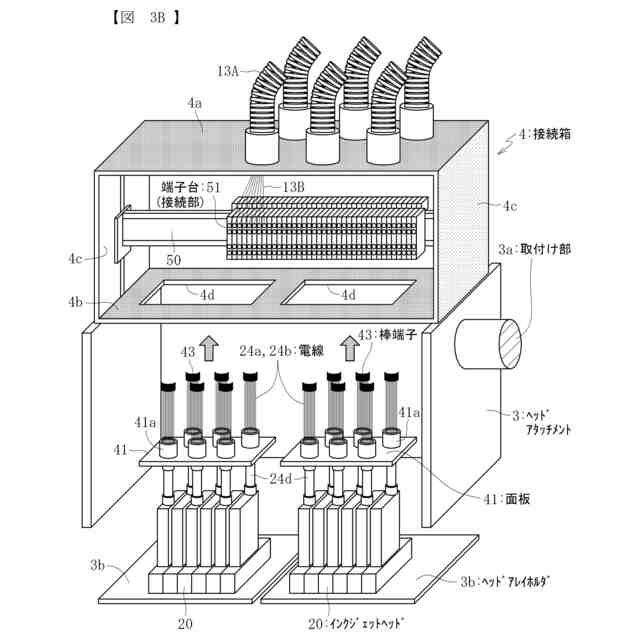
【選択図】図3B
特許請求の範囲
【請求項1】
ロボットアームと、当該ロボットアームの先端に設けられエンドエフェクタと、当該エンドエフェクタを前記ロボットアームの先端に取付けるためのヘッドアタッチメントと、前記エンドエフェクタと地上側に固定配置された制御盤とを接続する電線とを有する多関節ロボットにおいて、
前記エンドエフェクタから引き出された前記電線と前記制御盤から引き出された前記電線とを接続するための接続部が、前記ヘッドアタッチメントと一体化されていることを特徴とする多関節ロボット。
続きを表示(約 760 文字)
【請求項2】
前記接続部が防爆規格に準拠した接続箱の内部に配設され、当該接続箱が前記ヘッドアタッチメントと一体化されていることを特徴とする請求項1の多関節ロボット。
【請求項3】
前記接続部が端子台を有し、当該端子台に対して前記エンドエフェクタから引き出された前記電線が着脱可能に接続されることを特徴とする請求項2の多関節ロボット。
【請求項4】
前記接続箱が前記端子台に臨んで開口した開口部を有し、前記エンドエフェクタから引き出された前記電線が前記開口部を通して前記端子台に対して接続されることを特徴とする請求項3の多関節ロボット。
【請求項5】
前記エンドエフェクタから引き出された前記電線が当該電線が貫通する面板を有し、当該面板が前記開口部を塞ぐようにして前記接続箱に対して着脱可能に装着されることを特徴とする請求項4の多関節ロボット。
【請求項6】
前記エンドエフェクタが複数ユニットで構成されると共に、当該複数ユニットから引き出された複数電線が大形の前記面板で保持され、当該大形の面板が前記接続箱に形成された大形の前記開口部に対して着脱可能に装着されることを特徴とする請求項5の多関節ロボット。
【請求項7】
前記エンドエフェクタが複数ユニットで構成されると共に、当該複数ユニットのそれぞれが小形の前記面板を有し、当該小形の面板が前記接続箱に形成された小形の前記開口部に対して着脱可能に装着されることを特徴とする請求項5の多関節ロボット。
【請求項8】
請求項1から7のいずれか1項の多関節ロボットにおいて、前記エンドエフェクタがインクジェットヘッドで構成されていることを特徴とする塗装用多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は多関節ロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、例えば特許文献1(特開2015‐058515)や特許文献2(特開2004‐1177号公報)に記載のように、多関節ロボットの先端にエンドエフェクタ(例えば塗装用スプレーガン、スポット溶接用ガンなど)を取付けた作業用多関節ロボットが多くの産業分野で多用されている。エンドエフェクタから引き出されたエンドエフェクタ側電線は、ロボット側からくるロボット側電線と接続される。これら電線にはロボットが稼働する際に大きなストレス(屈曲や引張り)が掛かるので、特許文献1の発明では手首部(取付部とも言う)よりもエンドエフェクタ側で、エンドエフェクタ側電線とロボット側電線とを端子接続している。
【0003】
エンドエフェクタが塗装用のインクジェットヘッド等の場合、エンドエフェクタ側電線とロボット側電線の本数が多くなる。したがって、端子接続に手間が掛かり、インクジェットヘッド等の交換容易性を確保するのが難しい。
【発明の開示】
【発明が解決しようとする課題】
【0004】
そこで本発明の課題は、引き出される電線の本数が多いエンドエフェクタであっても交換容易性を確保可能な多関節ロボットを提供することにある。
【課題を解決するための手段】
【0005】
前記課題を解決するための本発明の多関節ロボットは、ロボットアームと、当該ロボットアームの先端に設けられエンドエフェクタと、当該エンドエフェクタを前記ロボットアームの先端に取付けるためのヘッドアタッチメントと、前記エンドエフェクタと地上側に固定配置された制御盤とを接続する電線とを有する多関節ロボットにおいて、前記エンドエフェクタから引き出された前記電線と前記制御盤から引き出された前記電線とを接続するための接続部が、前記ヘッドアタッチメントと一体化されていることを特徴とする。
【発明の効果】
【0006】
本発明によれば、引き出される電線の本数が多いエンドエフェクタであっても交換容易性を確保することができる。
【図面の簡単な説明】
【0007】
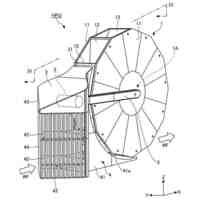
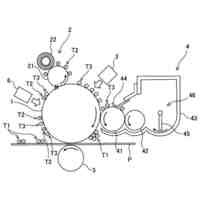
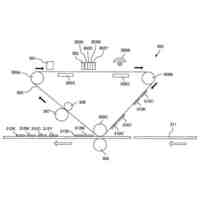
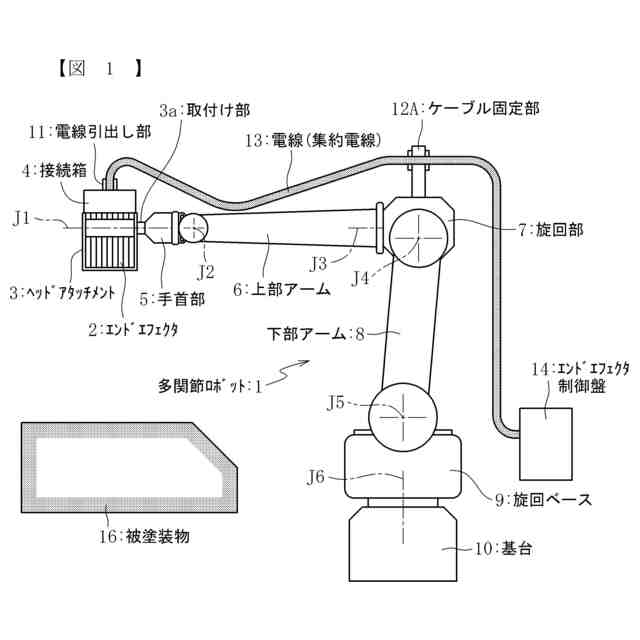
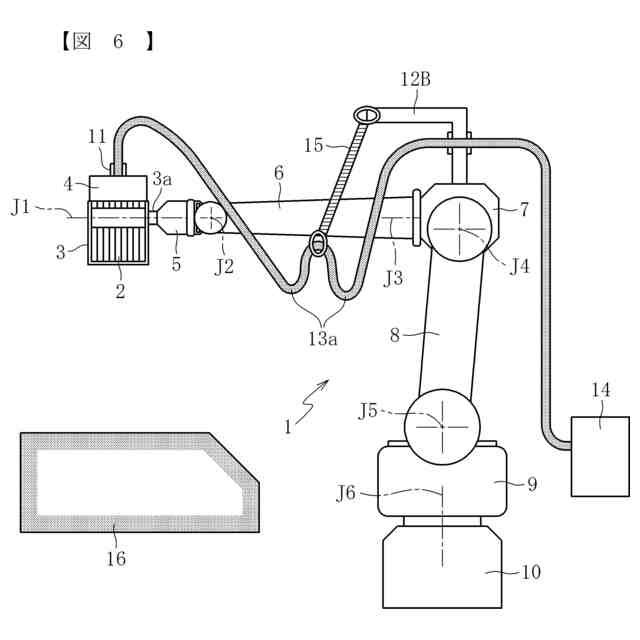
本発明の第1実施形態に係る多関節ロボットの概略図である。
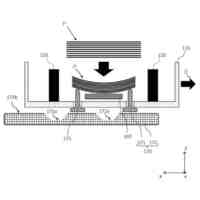
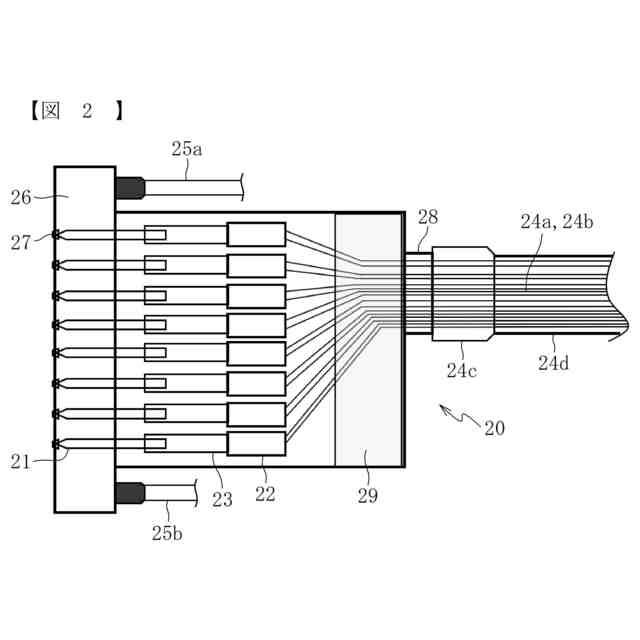
インクジェットヘッドの断面図である。
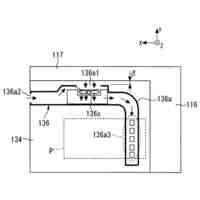
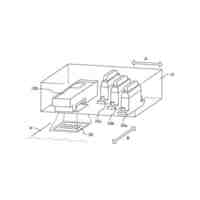
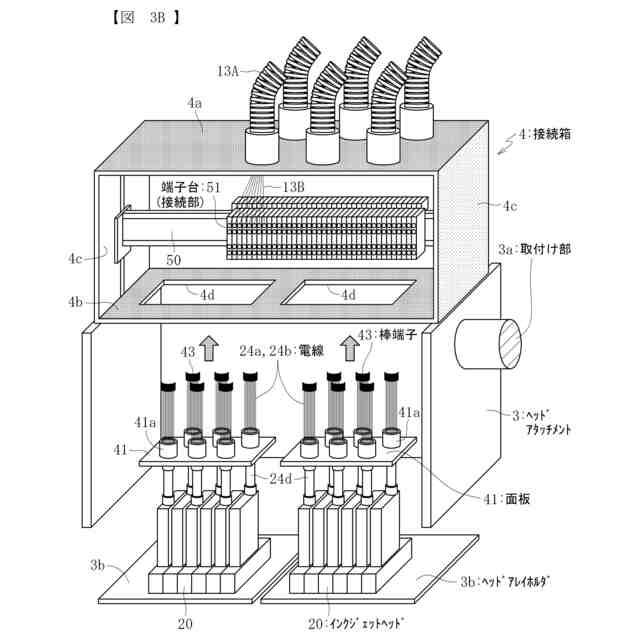
内部を示すため前壁を省略したヘッドアタッチメントと接続箱の組立斜視図である。
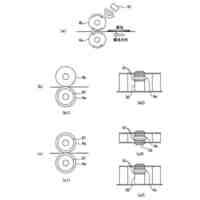
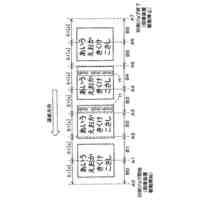
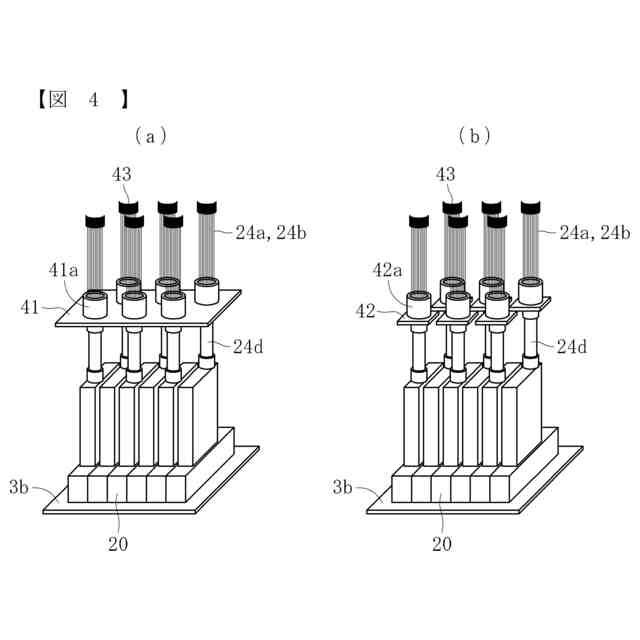
ヘッドアレイユニットをヘッドアタッチメントに取付ける状態を示す図である。
ヘッドアレイユニットの斜視図である。
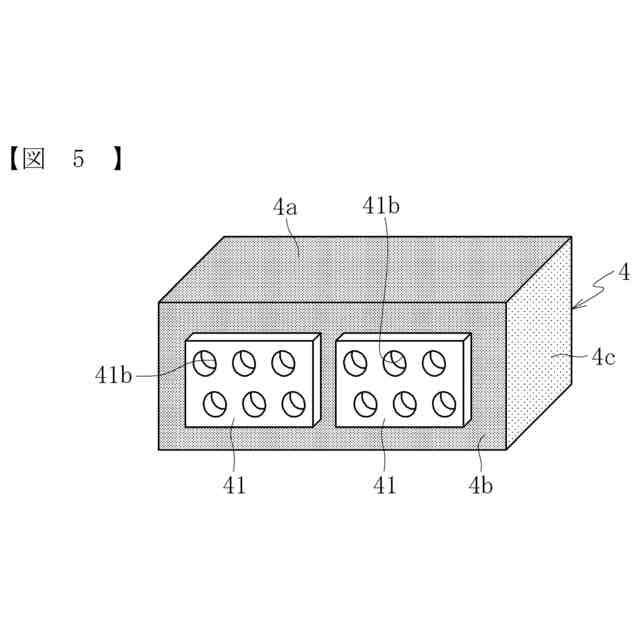
接続箱の斜視図である。
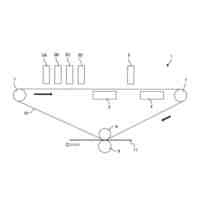
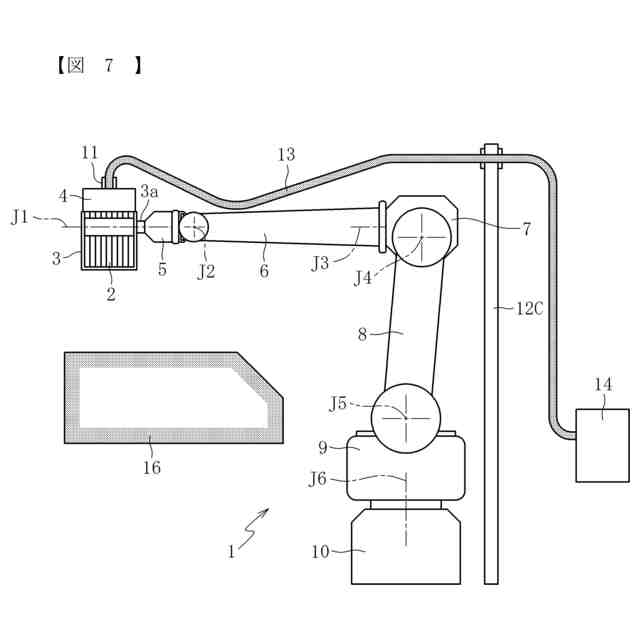
本発明の第2実施形態に係る多関節ロボットの概略図である。
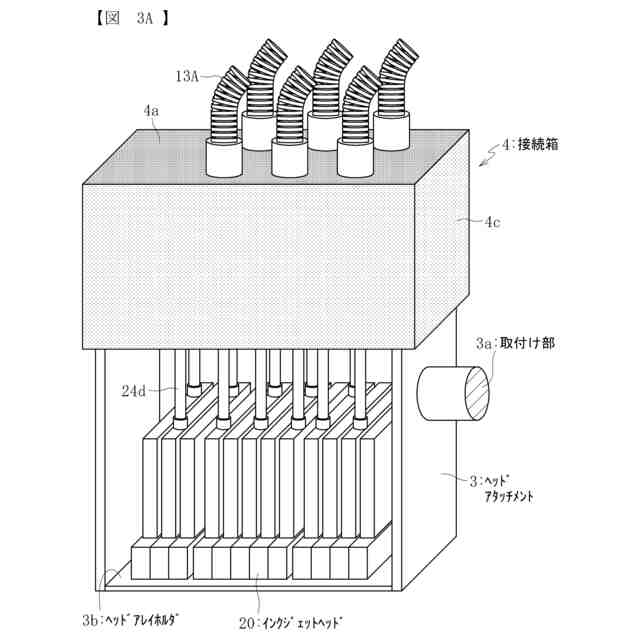
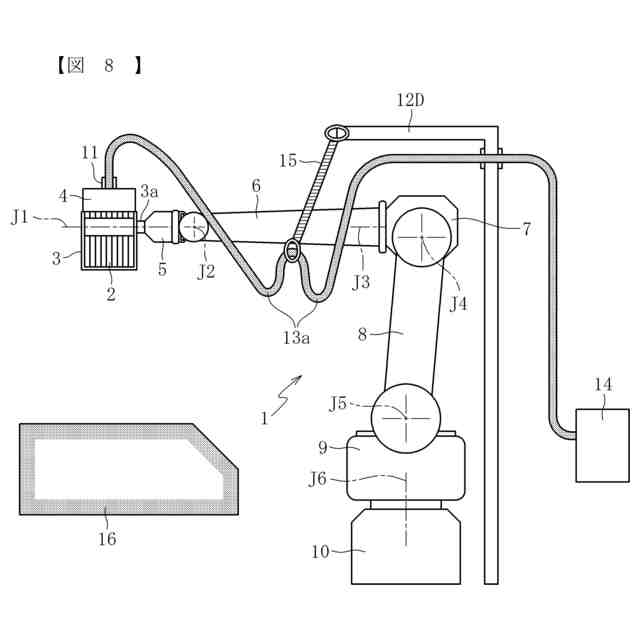
本発明の第3実施形態に係る多関節ロボットの概略図である。
本発明の第4実施形態に係る多関節ロボットの概略図である。
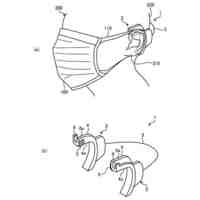
手術用ロボットのアーム遠位端に取付けられた鉗子の(a)斜視図と(b)拡大図である。
【発明を実施するための形態】
【0008】
以下に、本発明の第1実施形態に係る多関節ロボットから図面を参照して順に説明する。本発明の多関節ロボット1の特徴は、エンドエフェクタとしてのインクジェットヘッド20をロボットアームの先端に取付けるためのヘッドアタッチメント3に、インクジェットヘッド20から引き出された電線24a、24bと、エンドエフェクタ制御盤14から引き出された電線13Bとを接続するための接続部としての端子台51が、一体化されていることである。
【0009】
●第1実施形態
図1は本発明の第1実施形態に係る多関節ロボットの概略図である。多関節ロボット1は、図1に示すように複数のリンクと、各リンクを接続する複数の回転軸J1~J6を有する多関節ロボット(6軸の垂直多関節ロボット)である。
【0010】
この多関節ロボット1の基台10上に、垂直な回転軸J6を介して水平旋回可能な旋回ベース(基本第1軸)9が配設されている。旋回ベース(基本第1軸)9上に、水平な回転軸J5を介して下部アーム(基本第2軸)8が前後動可能に配設されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社リコー
ユニット
21日前
株式会社リコー
綴じ装置
1日前
株式会社リコー
塗装装置
22日前
株式会社リコー
画像投射装置
14日前
株式会社リコー
液体吐出装置
2日前
株式会社リコー
画像形成装置
21日前
株式会社リコー
画像形成装置
26日前
株式会社リコー
水力発電装置
21日前
株式会社リコー
画像形成装置
21日前
株式会社リコー
液体塗布装置
22日前
株式会社リコー
画像形成装置
13日前
株式会社リコー
液体吐出装置
22日前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
画像形成装置
6日前
株式会社リコー
画像形成装置
6日前
株式会社リコー
液体吐出装置
21日前
株式会社リコー
画像形成装置
1か月前
株式会社リコー
履帯式走行体
2日前
株式会社リコー
画像形成装置
1日前
株式会社リコー
画像形成装置
2日前
株式会社リコー
生体情報測定装置
26日前
株式会社リコー
カラー画像形成装置
7日前
株式会社リコー
印刷装置及び印刷方法
1か月前
株式会社リコー
電子機器および通信方法
21日前
株式会社リコー
炭素繊維含有樹脂組成物
1か月前
株式会社リコー
現像装置及び画像形成装置
14日前
株式会社リコー
定着装置及び画像形成装置
28日前
株式会社リコー
給送装置及び画像形成装置
2日前
株式会社リコー
ジョブ設定調整メカニズム
21日前
株式会社リコー
個片モジュールの製造方法
21日前
株式会社リコー
塗装装置、及び塗装システム
6日前
株式会社リコー
検査装置および液体吐出装置
1か月前
株式会社リコー
画像形成装置及び画像形成方法
15日前
株式会社リコー
媒体供給装置及び画像形成装置
28日前
株式会社リコー
液体吐出装置及び液体吐出方法
22日前
株式会社リコー
画像形成装置及び画像形成方法
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ