TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101122
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023217734
出願日
2023-12-25
発明の名称
ロボット
出願人
株式会社ジャノメ
代理人
個人
主分類
B25J
9/02 20060101AFI20250630BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】小型化でき、且つ、ワークテーブルの支持剛性を高くできるロボットを提供する。
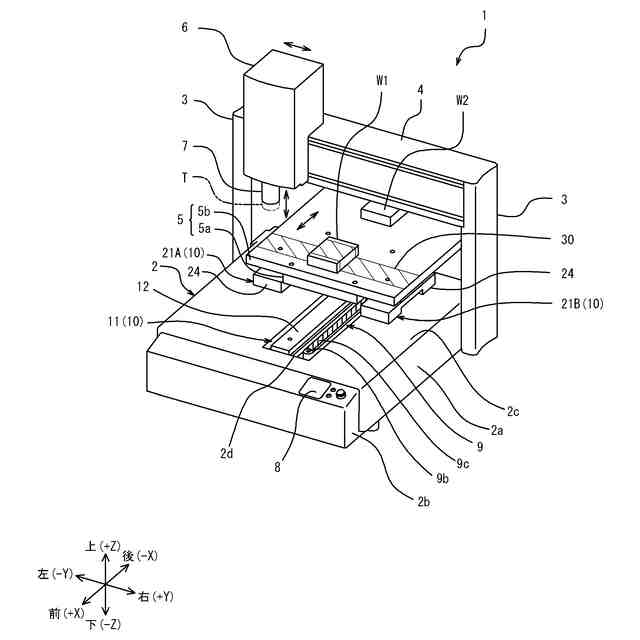
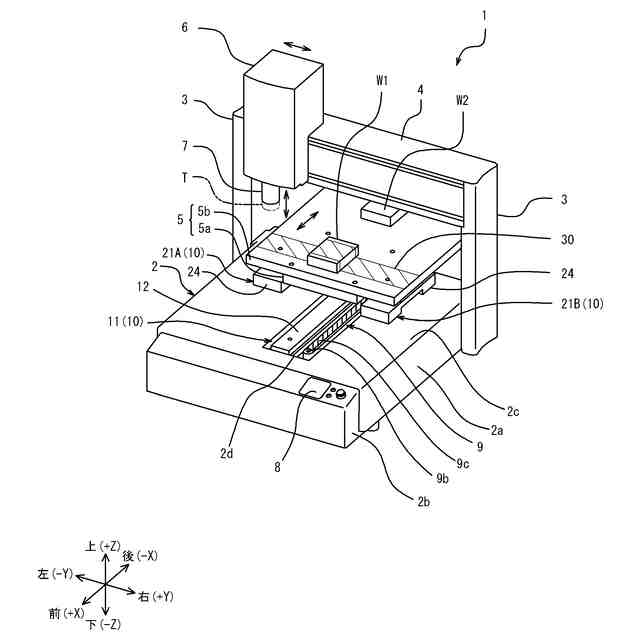
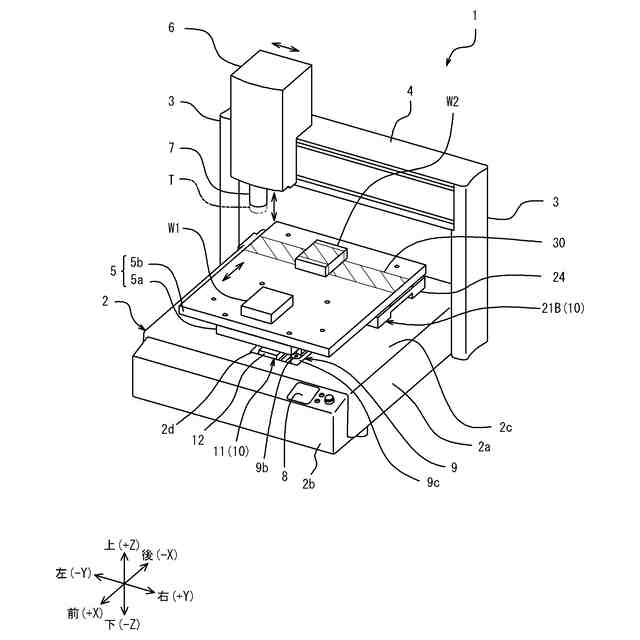
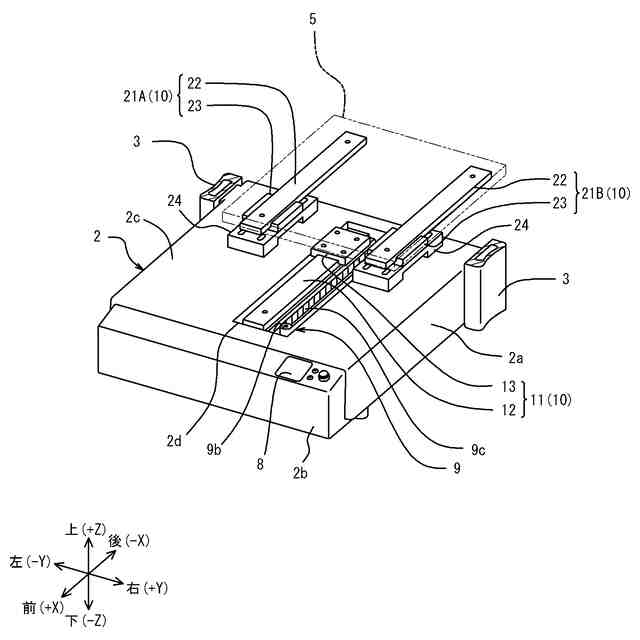
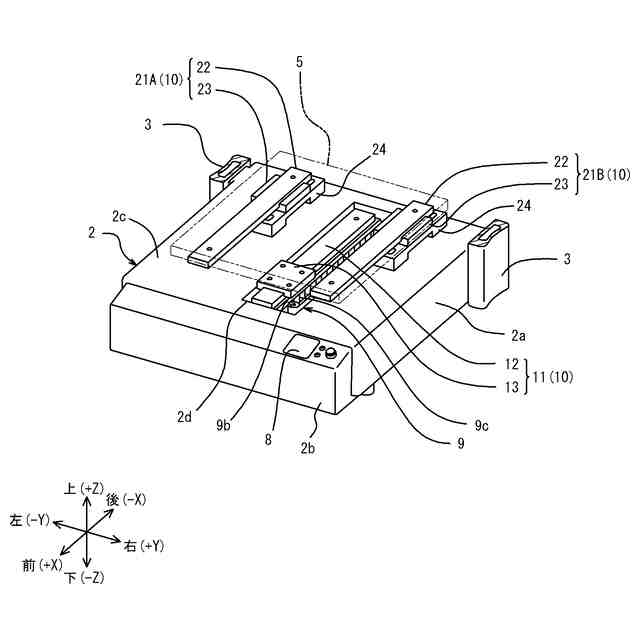
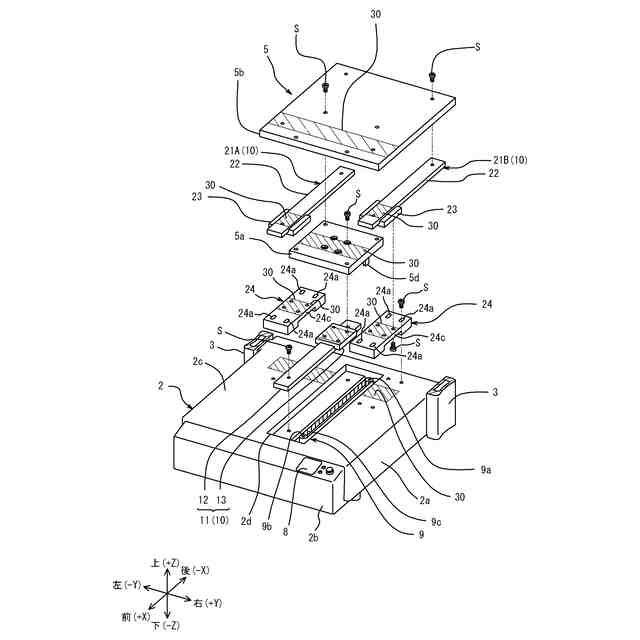
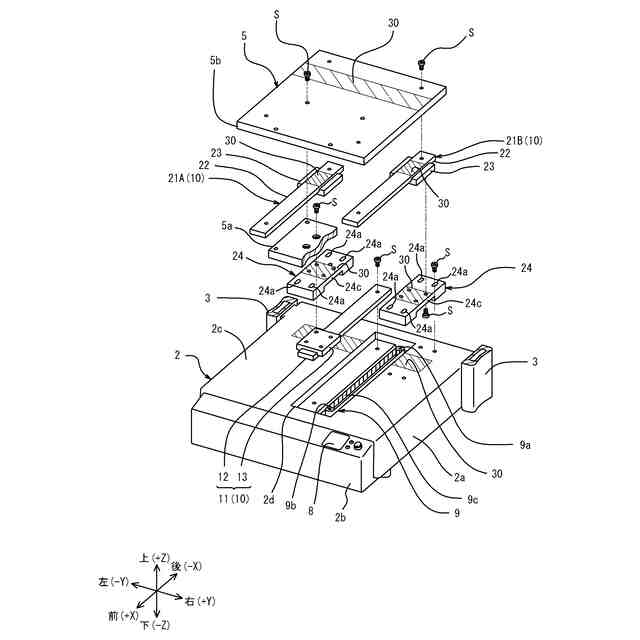
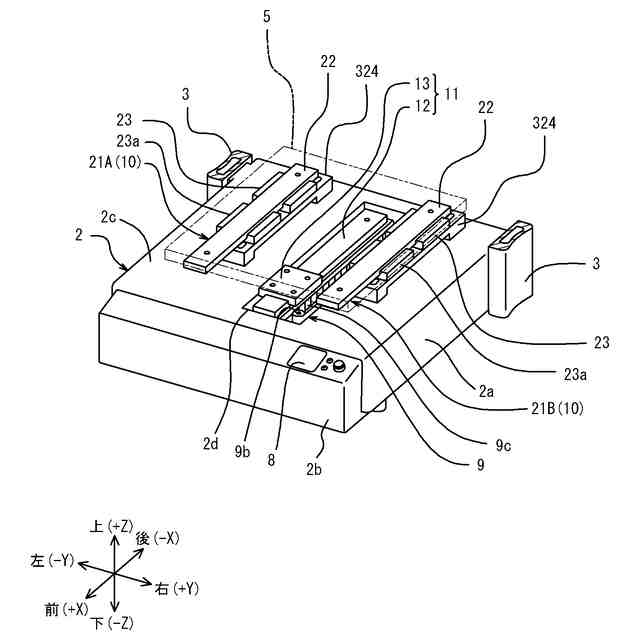
【解決手段】ロボット1は、ツールTを用いてワークW1,W2に対して作業を行うロボットであって、ベース2と、ワークW1,W2を支持するワークテーブル5と、ベース2に対してワークテーブル5を直線状に移動可能に支持し、平行に配置された直動ガイド10と、を備え、直動ガイド10は、直線状に延在するレール部と、レール部にスライド可能に支持されるスライダ部とを備え、直動ガイド10の少なくとも一つは、第1スライダ部13がワークテーブル5に取り付けられ、第1レール部12がベース2に取り付けられる第1直動ガイド11であり、直動ガイド10の残余は、第2レール部22がワークテーブル5に取り付けられ、第2スライダ部23がベース2に取り付けられる第2直動ガイド21A,21Bであることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
ツールとワークを相対移動させ、前記ツールを用いて前記ワークに対して作業を行うロボットであって、
ベースと、
前記ワークを支持するワークテーブルと、
前記ベースに対して前記ワークテーブルを直線状に移動可能に支持し、平行に配置された複数の直動ガイドと、を備え、
前記複数の直動ガイドのそれぞれは、直線状に延在するレール部と、前記レール部にスライド可能に支持されるスライダ部とを備え、
前記複数の直動ガイドの少なくとも一つは、前記スライダ部が前記ワークテーブルに取り付けられ、前記レール部が前記ベースに取り付けられる第1直動ガイドであり、
前記複数の直動ガイドの残余は、前記レール部が前記ワークテーブルに取り付けられ、前記スライダ部が前記ベースに取り付けられる第2直動ガイドであるロボット。
続きを表示(約 700 文字)
【請求項2】
前記第2直動ガイドは、前記ワークテーブルにおいて前記第1直動ガイドに対し外側に取り付けられる請求項1に記載のロボット。
【請求項3】
前記第2直動ガイドの前記スライダ部が前記ベースに取り付けられる位置を、前記第2直動ガイドの前記レール部が延在する方向に変更可能な調整機構を備える請求項1に記載のロボット。
【請求項4】
前記ワークに対して前記ツールを、前記第2直動ガイドの前記レール部が延在する方向に対して交差する方向に移動させるツール移動部を備え、
前記第2直動ガイドの前記スライダ部は、前記ツールが移動する移動軌跡の直下に位置する請求項1に記載のロボット。
【請求項5】
前記複数の直動ガイドの少なくとも一つは、前記レール部に複数の前記スライダ部が配置される請求項1に記載のロボット。
【請求項6】
前記第2直動ガイドの前記スライダ部の前記ベースに対する取り付けは、 前記第2直動ガイドの前記スライダ部を下から支持するとともに、前記第2直動ガイドの前記レール部が延在する方向における前記第2直動ガイドの前記スライダ部の動きを規制する溝部によってされる請求項1に記載のロボット。
【請求項7】
前記第1直動ガイドの前記スライダ部の前記ワークテーブルに対する取り付けは、
前記第1直動ガイドの前記スライダ部に載置されるとともに、前記第1直動ガイドの前記レール部が延在する方向における前記第1直動ガイドの前記スライダ部の動きを規制する溝部によってされる請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークテーブルを直線状に移動可能に支持する直動ガイドを備えるロボットに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、例えば3方向の直動機構によってツールとワークを3次元的に駆動させ、回路基板などの小型部品のネジ締め、組み立て等の各種作業を自動化することが可能な小型のロボット(卓上ロボット)が知られている(例えば、特許文献1参照)。これらのロボットが普及するにつれ、例えば、ワークテーブルを広くしたい、加圧作業等の他の作業も行いたい、といったように、用途や要望が拡大し、それに応えるように、例えば、特許文献2及び特許文献3のようなロボットが提案されている。
【0003】
上記のようなロボットでは、ワークを支持するワークテーブルは、直動ガイドに支持されて、往復直進運動が可能な構成となっている。この直動ガイドは、テーブル等のベース側に設けられる直線状のレール部と、レール部にスライド可能に支持され、ワークテーブル側に設けられるスライダ部とを備える。ここで、例えばワークテーブルの面積を大きくしたり、加圧されるワークテーブルを支持したりする場合には、ワークテーブルが傾かないようにワークテーブルの支持剛性を高める必要がある。特許文献1では、1本のレール部と1個のスライダ部によってワークテーブルを支持しているが、特許文献2及び特許文献3では、2本のレール部とスライダ部によってワークテーブルを支持し、ワークテーブルの支持剛性が高められている。更に、特許文献2では、1本のレール部に対し2個のスライダ部を用いることで、ワークテーブルの支持剛性が高められている。
【先行技術文献】
【特許文献】
【0004】
特開平11-340695号公報
特開平6-143055号公報
特開平2-160127号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2のように、1本のレール部に対しスライド方向に複数のスライダを設けることでワークテーブルの支持剛性を高くできる。しかし、レール部当たりのスライダの数を増加させると、スライダ間の距離及びスライダの長さに応じて、ワークテーブルのスライド可動量が減少する。一方、スライド可動量を確保するためにレール部を延長すると、ワークテーブル周りの構造が大型化してしまう。
【0006】
このような問題点に鑑み、本発明は、小型化でき、且つ、ワークテーブルの支持剛性を高くできるロボットを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明は、ツールとワークを相対移動させ、前記ツールを用いて前記ワークに対して作業を行うロボットであって、ベースと、前記ワークを支持するワークテーブルと、前記ベースに対して前記ワークテーブルを直線状に移動可能に支持し、平行に配置された複数の直動ガイドと、を備え、前記直動ガイドのそれぞれは、直線状に延在するレール部と、前記レール部にスライド可能に支持されるスライダ部とを備え、前記複数の直動ガイドの少なくとも一つは、前記スライダ部が前記ワークテーブルに取り付けられ、前記レール部が前記ベースに取り付けられる第1直動ガイドであり、前記複数の直動ガイドの残余は、前記レール部が前記ワークテーブルに取り付けられ、前記スライダ部が前記ベースに取り付けられる第2直動ガイドであることを特徴とする。
【0008】
このようなロボットにおいて、前記第2直動ガイドは、前記ワークテーブルにおいて前記第1直動ガイドに対し外側に取り付けられることが好ましい。
【0009】
このようなロボットにおいて、前記第2直動ガイドの前記スライダ部が前記ベースに取り付けられる位置を、前記レール部が延在する方向に変更可能な調整機構を備えることが好ましい。
【0010】
また、このようなロボットにおいて、前記ワークに対して前記ツールを、前記レール部が延在する方向に対して交差する方向に移動させるツール移動部を備え、前記第2直動ガイドの前記スライダ部は、前記ツールが移動する移動軌跡の直下に位置することが好ましい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
22日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
11日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
搬送装置
15日前
個人
ペグハンマおよびペグハンマ用部品
15日前
住友重機械工業株式会社
教示装置
8日前
川崎重工業株式会社
ロボット
9日前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
8日前
工機ホールディングス株式会社
作業機
1か月前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
15日前
住友重機械工業株式会社
支援装置
15日前
株式会社PILLAR
チューブ保持治具
1か月前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
17日前
ホシデン株式会社
分解用治具
15日前
株式会社マキタ
電気機器
9日前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
11日前
株式会社マキタ
電動作業機
1か月前
工機ホールディングス株式会社
作業機
11日前
株式会社リコー
多関節ロボット
15日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社マキタ
電動作業機
1か月前
工機ホールディングス株式会社
作業機
11日前
工機ホールディングス株式会社
作業機
11日前
株式会社ダイヘン
ロボット制御システム
1か月前
SMC株式会社
ベルヌーイグリッパ
11日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































