TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081014
公報種別
公開特許公報(A)
公開日
2025-05-27
出願番号
2023194485
出願日
2023-11-15
発明の名称
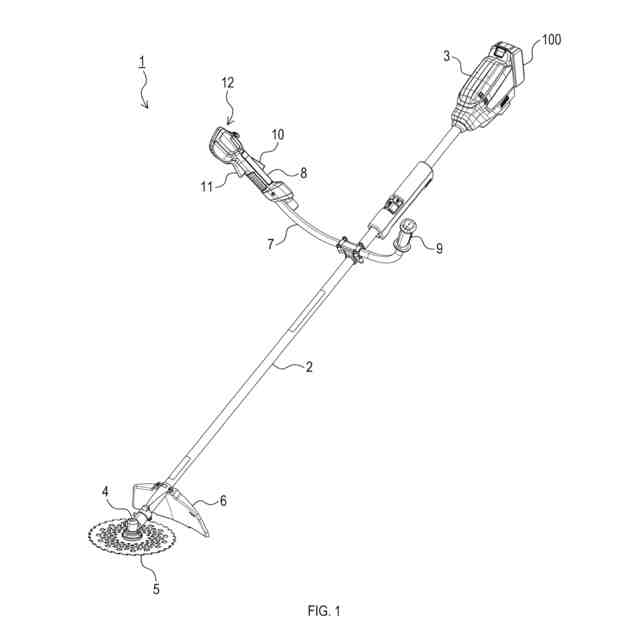
電動作業機
出願人
株式会社マキタ
代理人
名古屋国際弁理士法人
主分類
B25F
5/00 20060101AFI20250520BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モータを減速または停止させる際の使用感の良い電動作業機を提供する。
【解決手段】電動作業機は、モータと、第1操作部と、第2操作部と、制御回路とを備える。制御回路は、第1操作部において第1駆動操作がなされていて且つ第2操作部において第2駆動操作がなされていることに基づいて、モータを回転させる。制御回路は、モータを回転させているときに第1操作部において第1停止操作がなされたことに基づいて、モータを停止させるための第1停止制御を実行する。制御回路は、モータを回転させているときに第2操作部において第2停止操作がなされたことに基づいて、モータを停止させるための、第1停止制御とは異なる第2停止制御を実行する。
【選択図】図7
特許請求の範囲
【請求項1】
モータと、
手動により第1駆動操作と第1停止操作とが択一的になされるように構成された第1操作部と、
手動により第2駆動操作と第2停止操作とが択一的になされるように構成された第2操作部と、
制御回路であって、
前記第1操作部において前記第1駆動操作がなされていて且つ前記第2操作部において前記第2駆動操作がなされていることに基づいて、前記モータを回転させるための駆動制御を実行し、
前記モータを回転させているときに前記第1操作部において前記第1停止操作がなされたことに基づいて、前記モータを停止させるための第1停止制御を実行し、
前記モータを回転させているときに前記第2操作部において前記第2停止操作がなされたことに基づいて、前記モータを停止させるための、前記第1停止制御とは異なる第2停止制御を実行する、
ように構成された制御回路と、
を備える電動作業機。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の電動作業機であって、
前記第1停止制御は、所定の回転速度で前記モータが回転されているときに前記第1停止操作がなされた場合に、前記第1停止操作がなされてから平均して第1減速度で前記モータが停止するように前記モータを減速させることを含み、
前記第2停止制御は、前記所定の回転速度で前記モータが回転されているときに前記第2停止操作がなされた場合に、前記第2停止操作がなされてから平均して前記第1減速度とは異なる第2減速度で前記モータが停止するように前記モータを減速させることを含む、
電動作業機。
【請求項3】
請求項2に記載の電動作業機であって、
前記第1減速度は、前記第2減速度よりも小さい、
電動作業機。
【請求項4】
請求項1~請求項3のいずれか1項に記載の電動作業機であって、
前記第1停止制御は、前記第1停止操作がなされてから第1時間が経過するまで、前記モータを惰性で回転させ、前記第1時間の経過後、前記モータに制動力を加えて減速させることを含み、
前記第2停止制御は、前記第2停止操作がなされてから、前記第1時間よりも短い第2時間が経過するまで、前記モータを惰性で回転させ、前記第2時間の経過後、前記モータに制動力を加えて減速させることを含む、
電動作業機。
【請求項5】
請求項1または請求項2に記載の電動作業機であって、
前記第2停止制御は、前記第2操作部において前記第2停止操作がなされたときの前記モータの実際の回転速度である操作時実速度に応じた、前記モータを停止させるための制御プロファイルに従って、前記モータを停止させることを含む、
電動作業機。
【請求項6】
請求項5に記載の電動作業機であって、
前記制御プロファイルは、前記第2停止操作がなされてから前記モータが停止するまでの平均の減速度が、前記操作時実速度が閾速度以上である場合よりも前記操作時実速度が前記閾速度未満である場合の方が大きくなるように、設定されている、
電動作業機。
【請求項7】
請求項6に記載の電動作業機であって、
前記制御プロファイルは、
前記操作時実速度が閾速度以上である場合、前記第2停止操作がなされてから規定時間が経過するまで、前記モータを惰性で回転させ、前記規定時間の経過後、前記モータに制動力を加えて減速させることと、
前記操作時実速度が前記閾速度未満である場合、前記モータを惰性で回転させることなく前記モータに制動力を加えて減速させることと、
を含む、電動作業機。
【請求項8】
請求項6に記載の電動作業機であって、
前記制御プロファイルは、
前記操作時実速度が閾速度以上である場合、前記第2停止操作がなされてから第1規定時間が経過するまで、前記モータを惰性で回転させ、前記第1規定時間の経過後、前記モータに制動力を加えて減速させることと、
前記操作時実速度が前記閾速度未満である場合、前記第2停止操作がなされてから前記第1規定時間よりも短い第2規定時間が経過するまで、前記モータを惰性で回転させ、前記第2規定時間の経過後、前記モータに制動力を加えて減速させることと、
を含む、電動作業機。
【請求項9】
請求項1または請求項2に記載の電動作業機であって、
前記第2操作部は、第1領域及び第2領域を含む移動範囲内を手動により移動されるように構成されており、
前記第2操作部が前記第1領域に移動されることは、前記第2駆動操作に対応し、
前記第2操作部が前記第2領域に移動されることは、前記第2停止操作に対応する、
電動作業機。
【請求項10】
請求項9に記載の電動作業機であって、
前記駆動制御は、前記第2操作部が前記第1領域内にあるときに、前記第1領域における前記第2操作部の位置に応じて目標回転速度を設定し、設定されている前記目標回転速度で前記モータを回転させる、ことを含む、
電動作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、電動作業機におけるモータを制御する技術に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
特許文献1は、トリガスイッチを備えた草刈機を開示している。この草刈機では、ユーザがトリガスイッチをオンするとモータが回転する。モータの回転中にトリガスイッチがオフされると、モータを停止させるための所定の制御(以下、「停止制御」と称する)が行われる。
【先行技術文献】
【特許文献】
【0003】
特許第5351752号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
草刈機の使用状況にかかわらず同じ停止制御が行われるのは、必ずしも使い勝手が良いとは言えない。草刈機以外の各種の電動作業機においても同様である。
本開示の1つの局面は、モータを減速または停止させる際の使用感の良い電動作業機を提供する。
【課題を解決するための手段】
【0005】
本開示の1つの局面は、モータと、第1操作部と、第2操作部と、制御回路と、を備える電動作業機を提供する。
第1操作部は、手動により第1駆動操作と第1停止操作とが択一的になされるように構成されている。第2操作部は、手動により第2駆動操作と第2停止操作とが択一的になされるように構成されている。
【0006】
制御回路は、第1操作部において第1駆動操作がなされていて且つ第2操作部において第2駆動操作がなされていることに基づいて、モータを回転させるための駆動制御を実行する。制御回路は、モータを回転させているときに第1操作部において第1停止操作がなされたことに基づいて、モータを停止させるための第1停止制御を実行する。制御回路は、モータを回転させているときに第2操作部において第2停止操作がなされたことに基づいて、モータを停止させるための第2停止制御を実行する。第2停止制御は、第1停止制御とは異なる。
【0007】
このように構成された電動作業機では、ユーザは、第1操作部に対して第1停止操作を行うこと、及び第2操作部に対して第2停止操作を行うこと、のうちの少なくとも一方によって、モータを減速(ひいては停止)させることができる。しかも、第1停止操作によって行われる第1停止制御は、第2停止操作によって行われる第2停止制御とは異なる。そのため、ユーザは、例えば、モータを減速または停止させる際の電動作業機の動作状況あるいは使用状況などに応じて、第1停止操作または第2停止操作を使い分けることができる。したがって、モータを減速または停止させる際の使用感の良い電動作業機を提供することが可能となる。
【図面の簡単な説明】
【0008】
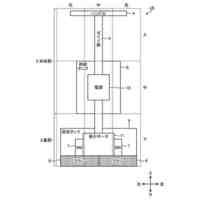
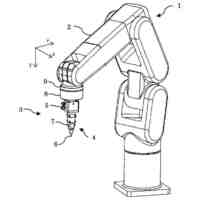
実施形態の電動作業機の斜視図である。
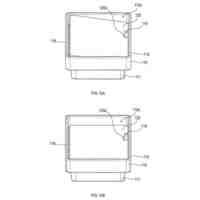
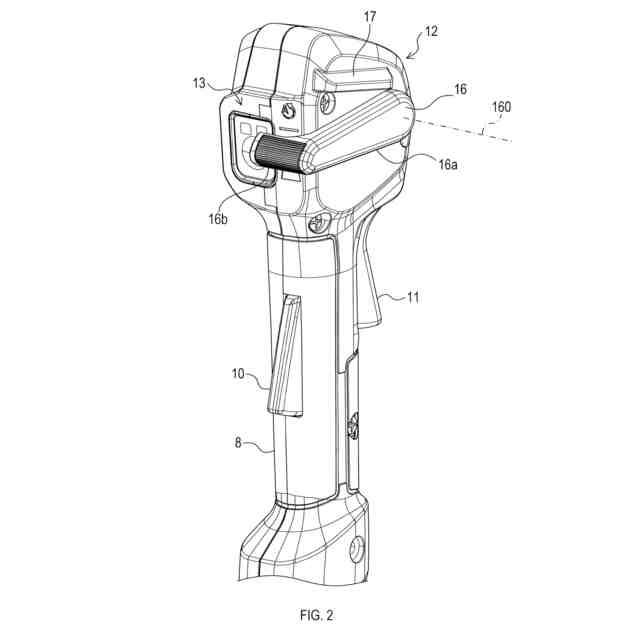
右グリップ及び操作ユニットの斜視図である。
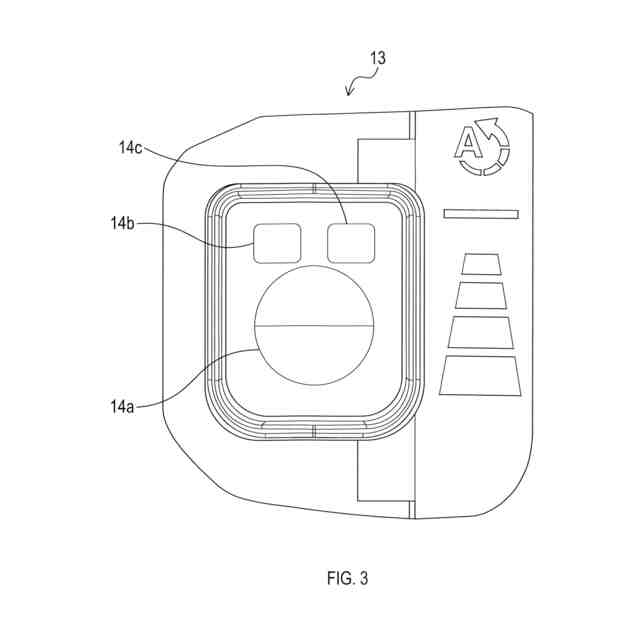
操作パネルの説明図である。
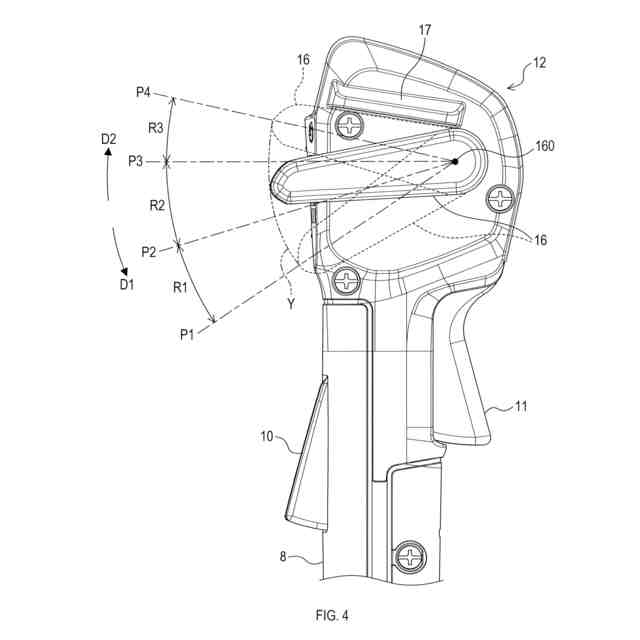
右グリップ及び操作ユニットの側面図である。
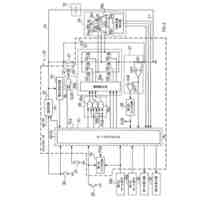
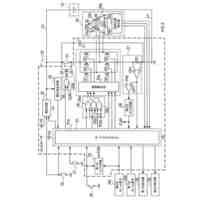
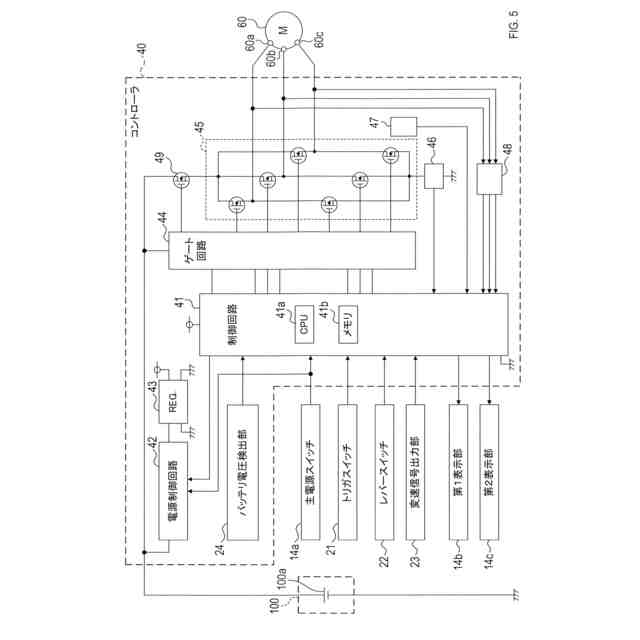
電動作業機の電気的構成を示す説明図である。
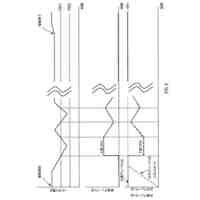
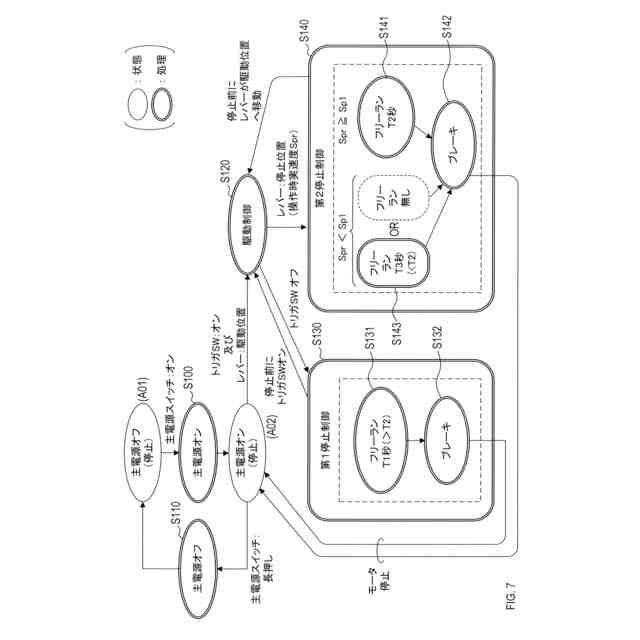
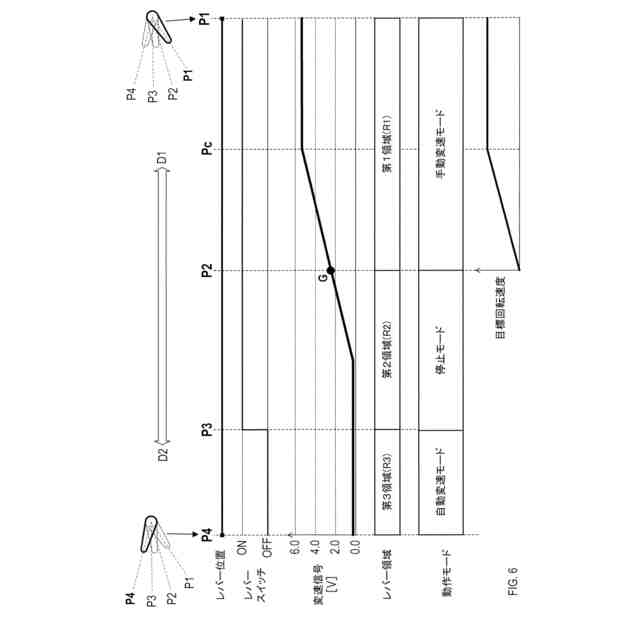
レバーの位置に応じた電動作業機の各種状態を示す説明図である。
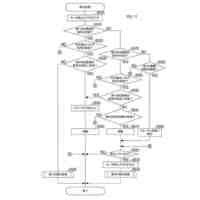
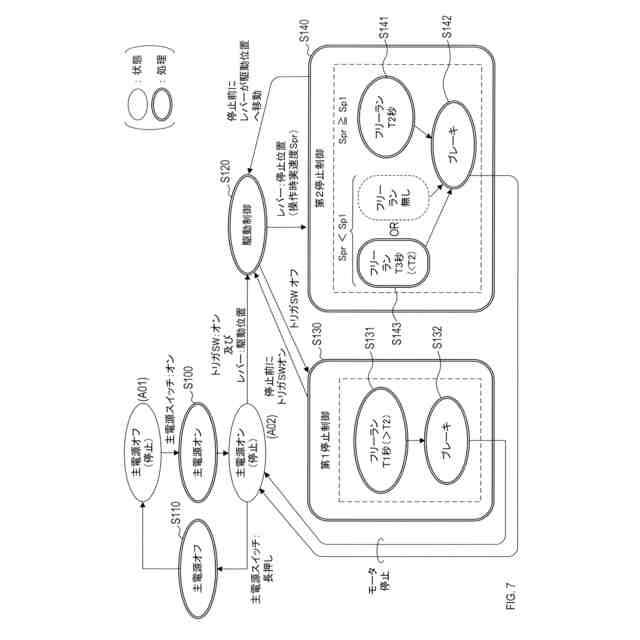
制御回路により実行される処理を示す説明図である。
【発明を実施するための形態】
【0009】
[1.実施形態の総括]
ある実施形態は、以下の特徴1~7のうちの少なくともいずれか1つを備えている電動作業機を提供してもよい。
・特徴1:モータ。
・特徴2:手動により第1駆動操作と第1停止操作とが択一的になされるように構成された第1操作部。
・特徴3:手動により第2駆動操作と第2停止操作とが択一的になされるように構成された第2操作部。
・特徴4:制御回路。
・特徴5:前記制御回路は、前記第1操作部において前記第1駆動操作がなされていて且つ前記第2操作部において前記第2駆動操作がなされていることに基づいて、前記モータを回転させるための駆動制御を実行する。
・特徴6:前記制御回路は、前記制御回路が前記モータを回転させているときに前記第1操作部において前記第1停止操作がなされたことに基づいて、第1停止制御を実行する。前記第1停止制御は、前記モータを停止させるための制御である。
・特徴7:前記制御回路は、前記制御回路が前記モータを回転させているときに前記第2操作部において前記第2停止操作がなされたことに基づいて、第2停止制御を実行する。前記第2停止制御は、前記モータを停止させるための制御である。前記第2停止制御は、前記第1停止制御とは異なる。
【0010】
第2操作部は、第1操作部から独立していてもよい。つまり、第1,第2操作部は互いに別個に備えられていてもよい。
少なくとも特徴1~7を備えている電動作業機は、前記モータを減速または停止させる際の使用感を向上させることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社マキタ
電動工具
20日前
株式会社マキタ
電動作業機
今日
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
集塵アタッチメント
12日前
株式会社マキタ
スクラバードライヤー
20日前
株式会社マキタ
往復動工具、及び、往復動工具の電動モータを制御する方法
5日前
株式会社マキタ
現場用機器における光学表示器の内部に回路基板を固定する技術
1か月前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータを制御する方法
5日前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータの通電を保持する方法
5日前
株式会社マキタ
往復動工具、及び、往復動工具における往復部材の位置検出に関連する不具合の発生を検出する方法
5日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
学習装置
20日前
CKD株式会社
把持装置
5日前
株式会社不二越
ロボット
2か月前
株式会社竹中工務店
補助セット
2か月前
ダイセイ株式会社
ロボット自動刻印装置
5日前
川崎重工業株式会社
ハンド
2か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
瓜生製作株式会社
電動締付工具
13日前
工機ホールディングス株式会社
作業機
2か月前
トヨタ自動車株式会社
ロボット
2か月前
株式会社不二越
移動ロボットシステム
2か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
株式会社不二越
垂直多関節ロボット
20日前
株式会社三共コーポレーション
工具保持具
1か月前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社マキタ
集塵アタッチメント
12日前
シンフォニアテクノロジー株式会社
搬送装置
2か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
アネックスツール株式会社
ドライバービット
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ