TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177959
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024085136
出願日
2024-05-24
発明の名称
往復動工具、及び、往復動工具の電動モータを制御する方法
出願人
株式会社マキタ
代理人
名古屋国際弁理士法人
主分類
B25F
5/00 20060101AFI20251128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】往復動工具における電動モータの停止操作が遅れることを抑制できる技術を提供する。
【解決手段】
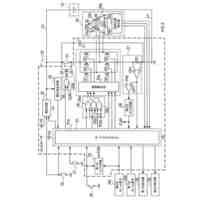
本開示の1つの局面は、往復部材と、電動モータと、伝達装置と、制御回路と、駆動回路と、位置検出器と、信号遮断回路とを備えている往復動工具を提供する。駆動回路は、(i)少なくとも1つの駆動信号を受け、(ii)受けた少なくとも1つの駆動信号に従って電動モータを駆動する。位置検出器は、往復部材がその少なくとも1回の往復動作における所定位置に到達する度に、位置検出信号を出力する。信号遮断回路は、位置検出器が位置検出信号を出力したことに応じて少なくとも1つの駆動信号を駆動回路から遮断するように構成されたワイヤードロジックを備えている。
【選択図】図6
特許請求の範囲
【請求項1】
往復動工具であって、
第1の死点と第2の死点との間を往復するように構成された往復部材と、
駆動力を発生するように構成された電動モータと、
少なくとも、前記第2の死点から前記第1の死点までの前記往復部材の行程において前記電動モータの前記駆動力を前記往復部材に伝達するように構成された伝達装置と、
前記電動モータを駆動するための少なくとも1つの駆動信号を出力するように構成された制御回路と、
(i)前記少なくとも1つの駆動信号を受け、(ii)受けた前記少なくとも1つの駆動信号に従って前記電動モータを駆動するように構成された駆動回路と、
前記往復部材がその少なくとも1回の往復動作における所定位置に到達する度に、位置検出信号を出力するように構成された位置検出器と、
前記位置検出器が前記位置検出信号を出力したことに応じて前記少なくとも1つの駆動信号を前記駆動回路から遮断するように構成されたワイヤードロジックを備えている信号遮断回路と
を備えている、往復動工具。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の往復動工具であって、
前記信号遮断回路は、(i)第1の論理値を受けて無効化され、(ii)第2の論理値を受けて有効化されるように構成され、
前記第2の論理値は、前記第1の論理値とは逆である、往復動工具。
【請求項3】
請求項2に記載の往復動工具であって、さらに、
前記往復動工具の使用者によって手動操作されるように構成された手動スイッチと、
(i)前記位置検出器が前記位置検出信号を出力したことに応じて、前記手動スイッチが手動操作されるまで前記第2の論理値を前記信号遮断回路に出力し続けるように構成されたラッチ回路と
を備えている、往復動工具。
【請求項4】
請求項3に記載の往復動工具であって、さらに、
前記使用者によって工作物に押し当てられるように構成された押し当て部材を備え、
前記手動スイッチは、前記押し当て部材が前記工作物に押し当てられていることによって手動操作されるように構成されている、往復動工具。
【請求項5】
請求項1~4のうちのいずれか1項に記載の往復動工具であって、
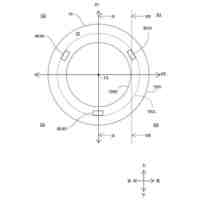
前記位置検出器は、(i)第1の磁極と第2の磁極とを有している磁石と、(ii)前記磁石の前記第1の磁極を検出するように構成されたホール素子とを備え、前記往復部材が前記所定位置に到達したことに応じて前記ホール素子が前記第1の磁極を検出して前記位置検出信号を出力するように構成されている、往復動工具。
【請求項6】
請求項5に記載の往復動工具であって、
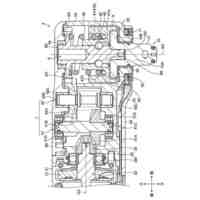
前記伝達装置は、
カムであって、(i)前記カムの周方向に並んだ複数のピンを有する外周縁を備え、(ii)前記電動モータの前記駆動力によって回転するように構成されたカムと
(i)前記磁石を保持していて、(ii)前記カムとともに回転するように構成されたホルダと
を備え、
前記往復部材は、(i)前記第1の死点と前記第2の死点との間に延在し、(ii)その延在方向に複数のラックを備え、(iii)前記複数のラックが前記複数のピンのそれぞれに係合することによって前記第2の死点から前記第1の死点へ駆動されるように構成されている、往復動工具。
【請求項7】
請求項6に記載の往復動工具であって、
前記第1の磁極は、前記ホルダの径方向外側を向いている、往復動工具。
【請求項8】
請求項6または7に記載の往復動工具であって、
前記カム及び前記ホルダは、同一の軸を中心に回転するように構成されている、往復動工具。
【請求項9】
請求項8に記載の往復動工具であって、
前記電動モータは、前記同一の軸を務めているロータを備えている、往復動工具。
【請求項10】
請求項6~9のうちのいずれか1項に記載の往復動工具であって、
前記ホルダは、非磁性体である、往復動工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、往復動工具に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
下記特許文献1は、打撃部が待機位置に到達した時点で電動モータを停止させるように構成された制御部を備えている打込機を開示している。制御部は、マイクロプロセッサを有している。
【先行技術文献】
【特許文献】
【0003】
特開2019-098456号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の打込機では、マイクロプロセッサの処理負荷に起因してマイクロプロセッサの動作に遅延が生じると、電動モータの停止操作が遅れる可能性がある。
そこで、本開示の1つの局面は、往復動工具における電動モータの停止操作が遅れることを抑制できる技術を提供することを目的とする。
【課題を解決するための手段】
【0005】
本開示において、「第1の」、「第2の」などの用語は、要素を互いに区別することを意図しているに過ぎず、要素の順序または数を限定することを意図していない。したがって、第1の要素を第2の要素と称してもよいし、同様に、第2の要素を第1の要素と称してもよい。加えて、第2の要素を備えることなく、第1の要素を備えていてもよいし、同様に、第1の要素を備えることなく、第2の要素を備えていてもよい。
【0006】
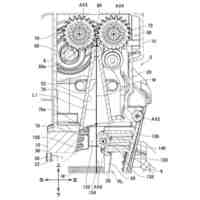
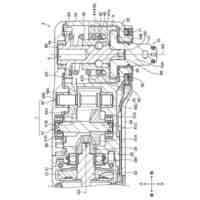
本開示の1つの局面は、往復部材と、電動モータと、伝達装置と、制御回路と、駆動回路と、位置検出器と、信号遮断回路とを備えている往復動工具を提供する。
往復部材は、第1の死点と第2の死点との間を往復するように構成されている。
【0007】
電動モータは、駆動力を発生するように構成されている。
伝達装置は、少なくとも、第2の死点から第1の死点までの往復部材の行程において電動モータの駆動力を往復部材に伝達するように構成されている。
【0008】
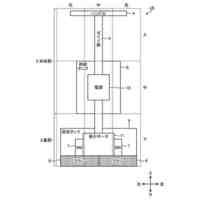
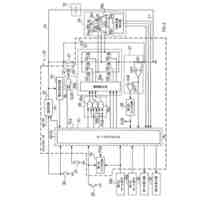
制御回路は、電動モータを駆動するための少なくとも1つの駆動信号を出力するように構成されている。
駆動回路は、(i)少なくとも1つの駆動信号を受け、(ii)受けた少なくとも1つの駆動信号に従って電動モータを駆動するように構成されている。
【0009】
位置検出器は、往復部材がその少なくとも1回の往復動作における所定位置に到達する度に、位置検出信号を出力するように構成されている。
信号遮断回路は、位置検出器が位置検出信号を出力したことに応じて少なくとも1つの駆動信号を駆動回路から遮断するように構成されたワイヤードロジックを備えている。
【0010】
このように構成された往復動工具では、往復部材がその少なくとも1回の往復動作における所定位置に到達すると、ワイヤードロジックが、マイクロプロセッサにおいて処理負荷に起因して生じ得る遅延を生じることなく、少なくとも1つの駆動信号を駆動回路から遮断する。その結果、駆動回路による電動モータの駆動は、直ちに停止され得る。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
16日前
株式会社マキタ
鉄筋結束機
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
回転打撃工具
2か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
ダイグラインダ
2か月前
株式会社マキタ
集塵アタッチメント
8日前
株式会社マキタ
スクラバードライヤー
16日前
株式会社マキタ
充電器及び充電システム
1か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
1か月前
株式会社マキタ
インパクト工具及びインパクトレンチ
1か月前
株式会社マキタ
往復動工具、及び、往復動工具の電動モータを制御する方法
1日前
株式会社マキタ
現場用機器における光学表示器の内部に回路基板を固定する技術
1か月前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータを制御する方法
1日前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータの通電を保持する方法
1日前
株式会社マキタ
往復動工具、及び、往復動工具における往復部材の位置検出に関連する不具合の発生を検出する方法
1日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
16日前
CKD株式会社
把持装置
1日前
川崎重工業株式会社
ハンド
1か月前
ダイセイ株式会社
ロボット自動刻印装置
1日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
瓜生製作株式会社
電動締付工具
9日前
トヨタ自動車株式会社
ロボット
2か月前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社マキタ
集塵アタッチメント
8日前
株式会社不二越
垂直多関節ロボット
16日前
トヨタ自動車株式会社
軌道生成装置
2か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ