TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025161421
公報種別
公開特許公報(A)
公開日
2025-10-24
出願番号
2024064593
出願日
2024-04-12
発明の名称
作業機
出願人
株式会社マキタ
代理人
弁理士法人 快友国際特許事務所
主分類
B25F
5/00 20060101AFI20251017BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】第1プラネタリギアが第1サンギアや第1インターナルギアと片当たりしてしまうことを抑制することが可能な技術を提供する。
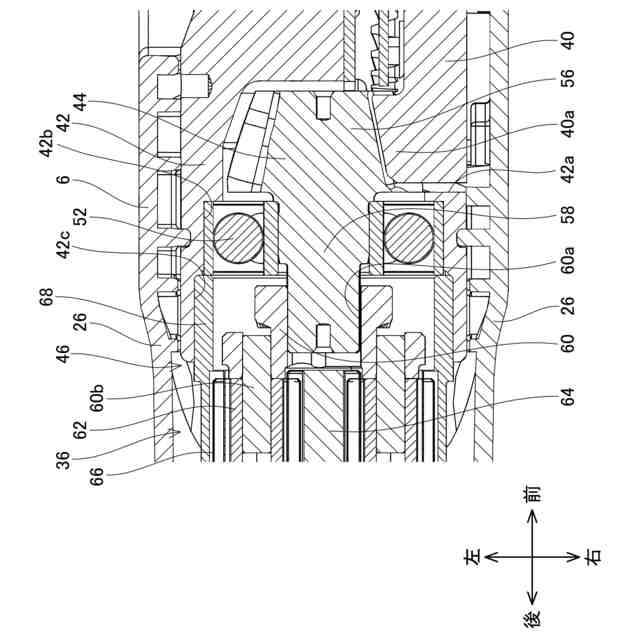
【解決手段】作業機は、原動機と、動力伝達部と、作業部と、ハウジングを備える。動力伝達部は、第1遊星歯車機構と、ベベルギアと、第1ベアリングと、第2ベアリングを備える。ベベルギアは、ギア部と、シャフト部を備える。第1遊星歯車機構は、シャフト部と一体的に回転可能な第1キャリアと、第1キャリアに回転可能に支持された第1プラネタリギアと、第1プラネタリギアの外側に配置された第1インターナルギアと、第1プラネタリギアの内側に配置された第1サンギアを備える。第1ベアリングは、ハウジングに直接的または間接的に支持されており、シャフト部を回転可能に支持する。第2ベアリングは、ハウジングに直接的または間接的に支持されており、第1キャリアを回転可能に支持する。
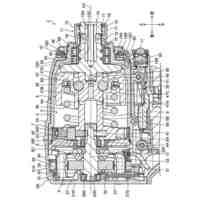
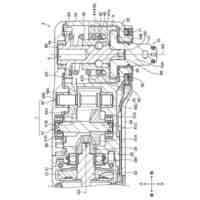
【選択図】図3
特許請求の範囲
【請求項1】
作業機であって、
原動機と、
前記原動機に連結された動力伝達部と、
前記動力伝達部に連結された作業部と、
前記動力伝達部を収容するハウジングを備えており、
前記動力伝達部は、
第1遊星歯車機構と、
ベベルギアと、
第1ベアリングと、
第2ベアリングを備えており、
前記ベベルギアは、
前記作業部に連結されたギア部と、
前記ギア部と一体的に回転可能なシャフト部を備えており、
前記第1遊星歯車機構は、
前記シャフト部と一体的に回転可能な第1キャリアと、
前記第1キャリアに回転可能に支持された第1プラネタリギアと、
前記第1プラネタリギアの外側で、前記第1プラネタリギアと噛み合うように配置された第1インターナルギアと、
前記第1プラネタリギアの内側で、前記第1プラネタリギアと噛み合うように配置された第1サンギアを備えており、
前記第1ベアリングは、前記ハウジングに直接的または間接的に支持されており、前記シャフト部を回転可能に支持しており、
前記第2ベアリングは、前記ハウジングに直接的または間接的に支持されており、前記第1キャリアを回転可能に支持している、作業機。
続きを表示(約 700 文字)
【請求項2】
前記第1インターナルギアは、前記ハウジングに固定されている、請求項1の作業機。
【請求項3】
前記第1遊星歯車機構は、前記第1インターナルギアと一体的に形成されたスリーブをさらに備えており、
前記第2ベアリングは、前記スリーブに直接的に支持されている、請求項1または2の作業機。
【請求項4】
前記第1ベアリングの中心軸方向に関して、前記スリーブは前記第1ベアリングに当接している、請求項3の作業機。
【請求項5】
前記動力伝達部は、第2遊星歯車機構をさらに備えており、
前記第2遊星歯車機構は、
前記第1サンギアと一体的に回転可能な第2キャリアと、
前記第2キャリアに回転可能に支持された第2プラネタリギアと、
前記第2プラネタリギアの外側で、前記第2プラネタリギアと噛み合うように配置された第2インターナルギアと、
前記第2プラネタリギアの内側で、前記第2プラネタリギアと噛み合うように配置された第2サンギアを備えている、請求項1から4の何れか一項の作業機。
【請求項6】
前記第2インターナルギアは、前記第1インターナルギアとは別体である、請求項5の作業機。
【請求項7】
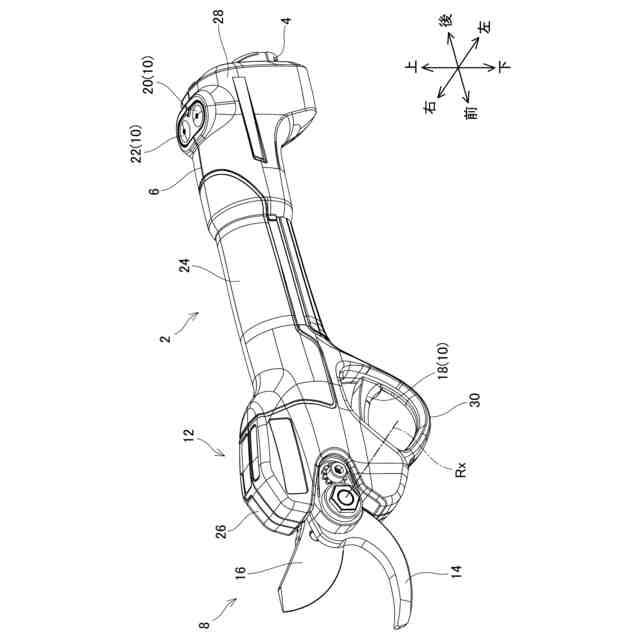
前記作業部は、第1刃と、前記第1刃に対して開位置と閉位置の間で移動可能な第2刃を備えており、
手持ち式の剪定ハサミとして機能する、請求項1から6の何れか一項の作業機。
【請求項8】
前記原動機は電動モータを備える、請求項1から7の何れか一項の作業機。
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、作業機に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1には、作業機が開示されている。前記作業機は、原動機と、前記原動機に連結された動力伝達部と、前記動力伝達部に連結された作業部と、前記原動機と前記動力伝達部を収容するハウジングを備えている。前記動力伝達部は、第1遊星歯車機構と、ベベルギアと、第1ベアリングと、第2ベアリングを備えている。前記ベベルギアは、前記作業部に連結されたギア部と、前記ギア部と一体的に回転可能なシャフト部を備えている。前記第1遊星歯車機構は、前記シャフト部に固定された第1キャリアと、前記第1キャリアに回転可能に支持された第1プラネタリギアと、前記第1プラネタリギアの外側で、前記第1プラネタリギアと噛み合うように配置された第1インターナルギアと、前記第1プラネタリギアの内側で、前記第1プラネタリギアと噛み合うように配置された第1サンギアを備えている。前記第1ベアリングは、前記ハウジングに直接的または間接的に支持されており、前記シャフト部を回転可能に支持している。前記第2ベアリングは、前記ハウジングに直接的または間接的に支持されており、前記シャフト部を回転可能に支持している。
【先行技術文献】
【特許文献】
【0003】
中国実用新案第209954711号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記のような作業機では、作業部が作業対象物から受ける反力に起因して、ベベルギアのギア部に所定方向の力が作用する。この際に、ベベルギアのシャフト部は、第1ベアリングや第2ベアリングを支点として所定方向とは逆方向に傾いてしまう。このため、第1キャリアが回転軸に対して直交する方向に偏位してしまい、第1プラネタリギアが第1サンギアや第1インターナルギアと片当たりしてしまう。本明細書では、第1プラネタリギアが第1サンギアや第1インターナルギアと片当たりしてしまうことを抑制することが可能な技術を提供する。
【課題を解決するための手段】
【0005】
本明細書が開示する作業機は、原動機と、前記原動機に連結された動力伝達部と、前記動力伝達部に連結された作業部と、前記動力伝達部を収容するハウジングを備えていてもよい。前記動力伝達部は、第1遊星歯車機構と、ベベルギアと、第1ベアリングと、第2ベアリングを備えていてもよい。前記ベベルギアは、前記作業部に連結されたギア部と、前記ギア部と一体的に回転可能なシャフト部を備えていてもよい。前記第1遊星歯車機構は、前記シャフト部と一体的に回転可能な第1キャリアと、前記第1キャリアに回転可能に支持された第1プラネタリギアと、前記第1プラネタリギアの外側で、前記第1プラネタリギアと噛み合うように配置された第1インターナルギアと、前記第1プラネタリギアの内側で、前記第1プラネタリギアと噛み合うように配置された第1サンギアを備えていてもよい。前記第1ベアリングは、前記ハウジングに直接的または間接的に支持されていてもよく、前記シャフト部を回転可能に支持していてもよい。前記第2ベアリングは、前記ハウジングに直接的または間接的に支持されていてもよく、前記第1キャリアを回転可能に支持していてもよい。
【0006】
上記の構成では、第2ベアリングによって、第1キャリアが回転軸に対して直交する方向に偏位することが拘束される。このため、作業部が作業対象物から受ける反力に起因して、ベベルギアのギア部に所定方向の力が作用する場合でも、ベベルギアのシャフト部が第1ベアリングを支点として所定方向とは逆方向に傾いてしまうことを抑制することができる。このような構成とすることによって、第1プラネタリギアが第1サンギアや第1インターナルギアと片当たりしてしまうことを抑制することができる。
【図面の簡単な説明】
【0007】
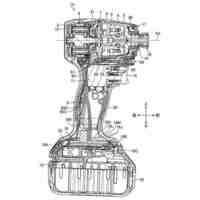
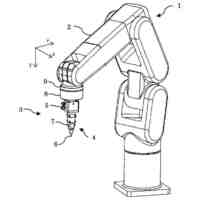
実施例に係る作業機2の斜視図である。
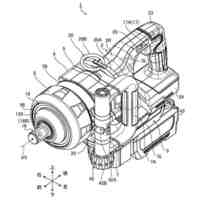
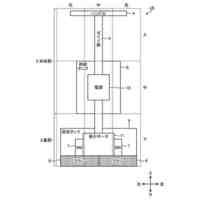
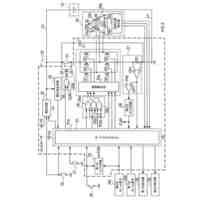
実施例に係る作業機2の後部の内部構造を右方から見た側面図である。
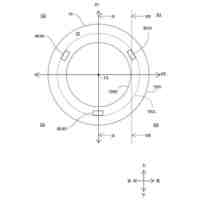
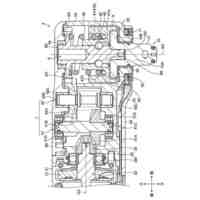
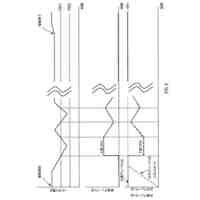
実施例に係る作業機2の動力伝達部36の近傍を上方から見た断面図である。
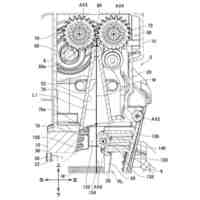
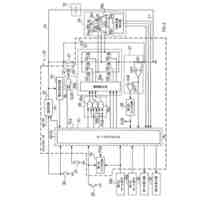
実施例に係る作業機2の前部の内部構造を右方から見た側面図である。
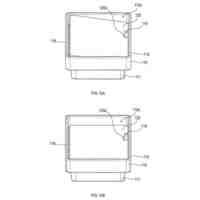
比較例に係る作業機2の動力伝達部36の近傍を上方から見た断面図である。
【発明を実施するための形態】
【0008】
本発明の代表的かつ非限定的な具体例について、図面を参照して以下に詳細に説明する。この詳細な説明は、本発明の好ましい例を実施するための詳細を当業者に示すことを単純に意図しており、本発明の範囲を限定することを意図したものではない。また、開示された追加的な特徴ならびに発明は、さらに改善された作業機を提供するために、他の特徴や発明とは別に、又は共に用いることができる。
【0009】
また、以下の詳細な説明で開示される特徴や工程の組み合わせは、最も広い意味において本発明を実施する際に必須のものではなく、特に本発明の代表的な具体例を説明するためにのみ記載されるものである。さらに、以下の代表的な具体例の様々な特徴、ならびに、特許請求の範囲に記載されるものの様々な特徴は、本発明の追加的かつ有用な実施形態を提供するにあたって、ここに記載される具体例のとおりに、あるいは列挙された順番のとおりに組合せなければならないものではない。
【0010】
本明細書及び/又は特許請求の範囲に記載された全ての特徴は、実施例及び/又は特許請求の範囲に記載された特徴の構成とは別に、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、個別に、かつ互いに独立して開示されることを意図するものである。さらに、全ての数値範囲及びグループ又は集団に関する記載は、出願当初の開示ならびに特許請求の範囲に記載された特定事項に対する限定として、それらの中間の構成を開示する意図を持ってなされている。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社マキタ
運搬車
2か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
運搬車
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動工具
16日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
鉄筋結束機
1か月前
株式会社マキタ
回転打撃工具
2か月前
株式会社マキタ
現場用作業機
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
インパクト工具
2か月前
株式会社マキタ
インパクト工具
2か月前
株式会社マキタ
ダイグラインダ
2か月前
株式会社マキタ
インパクト工具
1か月前
株式会社マキタ
集塵アタッチメント
8日前
株式会社マキタ
スクラバードライヤー
16日前
株式会社マキタ
充電器及び充電システム
1か月前
株式会社マキタ
電動工具及びインパクト工具
2か月前
株式会社マキタ
フレア形成装置及びフレア形成工具
1か月前
株式会社マキタ
インパクト工具及びインパクトレンチ
1か月前
株式会社マキタ
往復動工具、及び、往復動工具の電動モータを制御する方法
1日前
株式会社マキタ
現場用機器における光学表示器の内部に回路基板を固定する技術
1か月前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータを制御する方法
1日前
株式会社マキタ
往復動工具、及び、往復動工具における電動モータの通電を保持する方法
1日前
株式会社マキタ
往復動工具、及び、往復動工具における往復部材の位置検出に関連する不具合の発生を検出する方法
1日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
学習装置
16日前
株式会社不二越
ロボット
2か月前
CKD株式会社
把持装置
1日前
株式会社竹中工務店
補助セット
2か月前
ダイセイ株式会社
ロボット自動刻印装置
1日前
川崎重工業株式会社
ハンド
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ