TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025141268
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041132
出願日
2024-03-15
発明の名称
移動ロボットシステム
出願人
株式会社不二越
代理人
個人
主分類
B25J
5/00 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】総重量を過度に増加させることなく、広い作業領域を確保しつつ、稼働率を向上できる移動ロボットシステムを提供する。
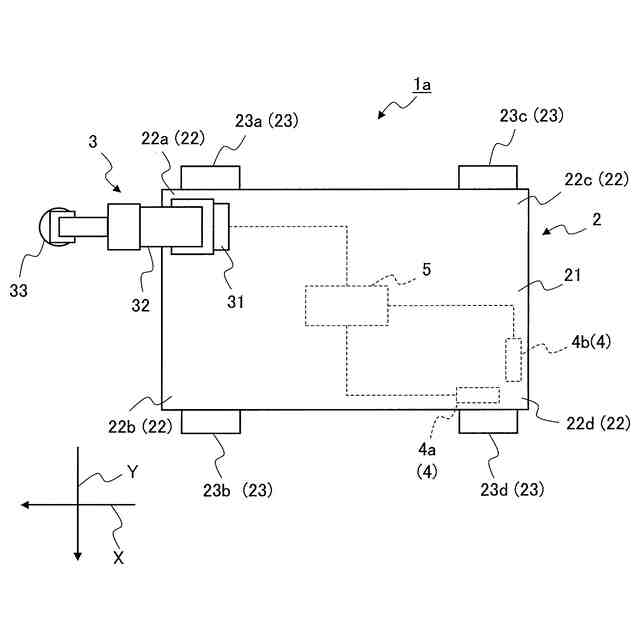
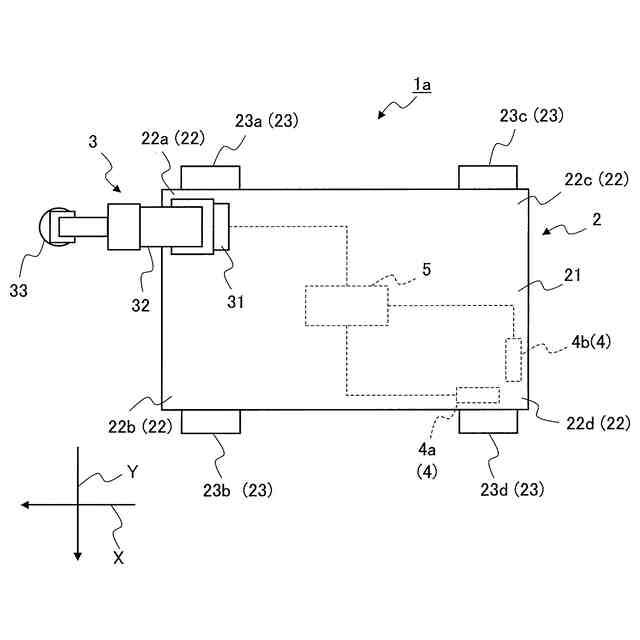
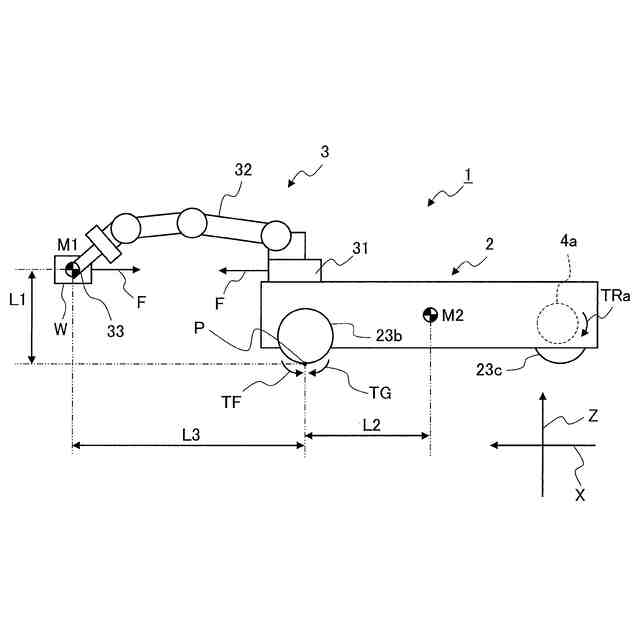
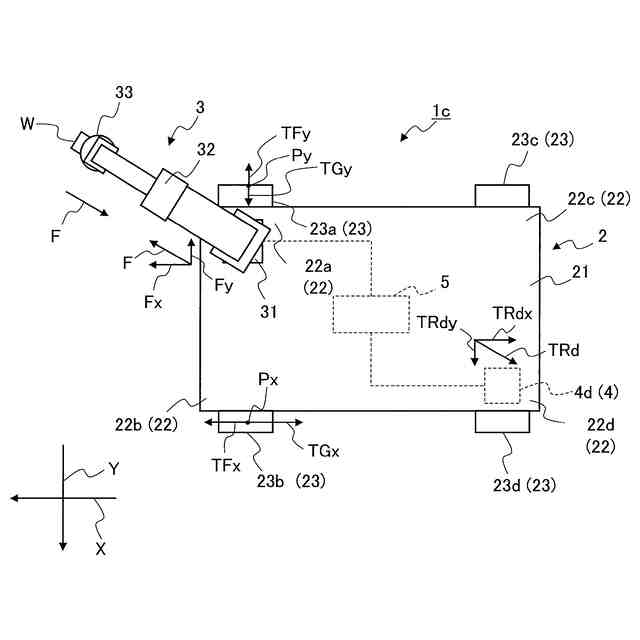
【解決手段】移動ロボットシステム1aは、自立走行可能な台車2と、台車2に据え付けられ、ロボットアーム32を有するロボット3と、を備える。また、移動ロボットシステム1aは、台車2に搭載され、トルクを発生させるトルク発生装置4と、ロボット3及びトルク発生装置4の動作を制御する制御装置5と、を更に備える。制御装置5は、台車2の転倒支点に作用する重力による回転モーメントを算出し、重力による回転モーメントに基づいてトルク発生装置4に発生させるトルクの大きさを決定する。
【選択図】図1
特許請求の範囲
【請求項1】
自立走行可能な台車と、前記台車に据え付けられるロボットと、を備える移動ロボットシステムであって、
前記台車に搭載され、トルクを発生させるトルク発生装置と、
前記ロボット及び前記トルク発生装置の動作を制御する制御装置と、
を更に備え、
前記制御装置は、前記台車の転倒支点に作用する前記ロボットの動作による回転モーメント、及び前記台車の転倒支点に作用する重力による回転モーメントに基づいて前記トルク発生装置に発生させるトルクの大きさを決定することを特徴とする移動ロボットシステム。
続きを表示(約 330 文字)
【請求項2】
前記ロボットは、ロボットアームを有し、
前記制御装置は、前記トルク発生装置に最大出力トルクを発生させても前記台車の転倒防止に不十分な場合、前記ロボットアームの力を抑制させることを特徴とする請求項1に記載の移動ロボットシステム。
【請求項3】
前記台車の上面は、該上面を上方から平面視した状態で4つの隅部を有する略長方形をなし、
前記ロボットは、前記台車の4つの隅部のいずれか一つの隅部に据え付けられ、
前記トルク発生装置は、リアクションホイールであり、前記ロボットが据え付けられる隅部の対角線上に位置する隅部に搭載される
ことを特徴とする請求項1又は請求項2に記載の移動ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、台車にロボットを搭載する移動ロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
生産現場等では、ロボットを搭載するAGV(Automatic
Guided Vehicle:無人搬送車)が利用されている。AGVでは、ロボットアームが目標のワークに届かないことがあり、ロボットアームのリーチ不足が課題になる。特許文献1は、ロボットアームの基端部が連結されたステージを変位させる変位機構を備える移動ロボットを開示している。
【先行技術文献】
【特許文献】
【0003】
特開2013-094934号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1は、ロボットアームのリーチ不足を解消し、広い作業領域を確保できる。しかしながら、ロボットの稼働率の低下という新たな問題が生じる。なぜなら、ロボットアームを最大リーチ長まで伸ばした状態では、移動ロボットの安定性が低下し、ロボットアームをゆっくりと動かす必要があるためである。また、特許文献1に記載の変位機構は、基端部から先端部までのロボットアーム全体を支持する必要があるとともに、ロボットアーム全体を移動させる必要がある。そうすると、特許文献1に記載の変位機構はサイズが大きくなり、必要な駆動力も大きくなる。従って、必然的に変位機構及び変位機構を動かすための駆動源の重量が大きくなり、移動ロボットの総重量が過大になるという問題も生じる。
【0005】
本発明は、前述した問題点に鑑みてなされたものであり、その目的は、総重量を過度に増加させることなく、広い作業領域を確保しつつ、稼働率を向上できる移動ロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
前述した目的を達成するための本発明は、自立走行可能な台車と、前記台車に据え付けられるロボットと、を備える移動ロボットシステムであって、前記台車に搭載され、トルクを発生させるトルク発生装置と、前記ロボット及び前記トルク発生装置の動作を制御する制御装置と、を更に備え、前記制御装置は、前記台車の転倒支点に作用する前記ロボットの動作による回転モーメント、及び前記台車の転倒支点に作用する重力による回転モーメントに基づいて前記トルク発生装置に発生させるトルクの大きさを決定するである。
【0007】
前記ロボットは、ロボットアームを有し、前記制御装置は、前記トルク発生装置に最大出力トルクを発生させても前記台車の転倒防止に不十分な場合、前記ロボットアームの力を抑制させるようにしても良い。
【0008】
また、前記台車の上面は、4つの隅部を有する略長方形をなし、前記ロボットは、前記台車の4つの隅部のいずれか一つの隅部に据え付けられ、前記トルク発生装置は、リアクションホイールであり、前記ロボットが据え付けられる隅部の対角線上に位置する隅部に搭載されるするようにしても良い。
【発明の効果】
【0009】
本発明により、総重量を過度に増加させることなく、広い作業領域を確保しつつ、稼働率を向上できる移動ロボットシステムを提供できる。
【図面の簡単な説明】
【0010】
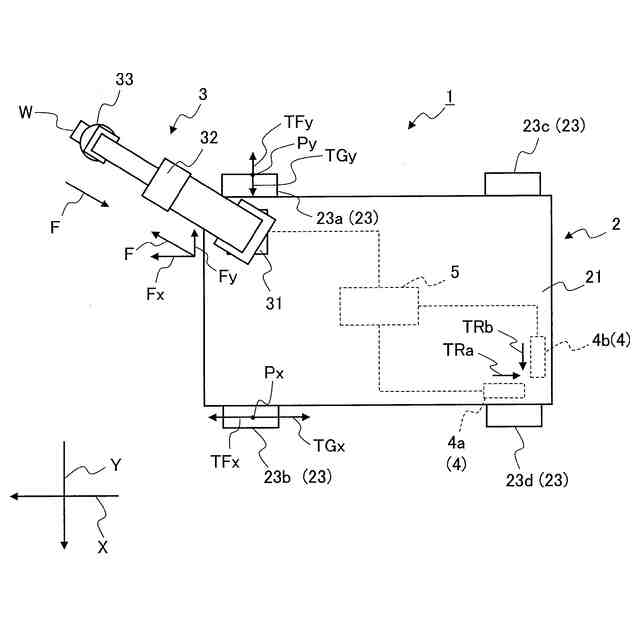
本発明の第1実施形態に係る移動ロボットシステムの全体構成を示す平面図
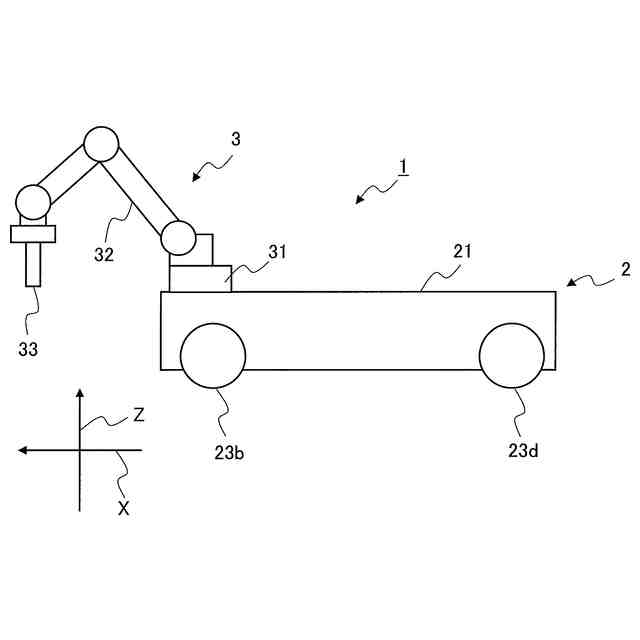
図1の移動ロボットシステムの全体構成を示す側面図
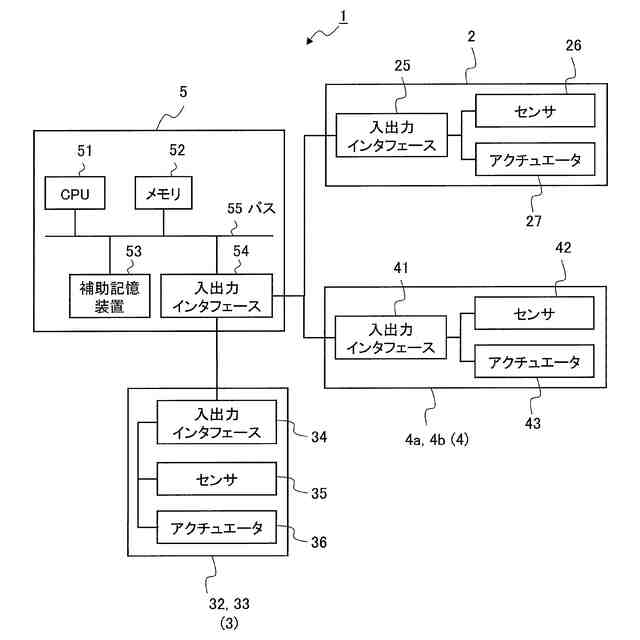
図1の移動ロボットシステムのハードウエアの構成を示すブロック図
図1の台車に作用するモーメント(トルク)の第1の例を説明する図
図1の台車に作用するモーメント(トルク)の第2の例を説明する図
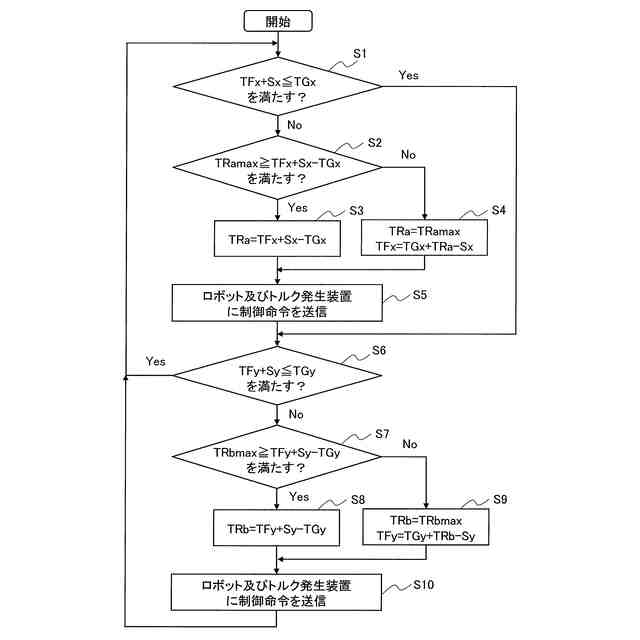
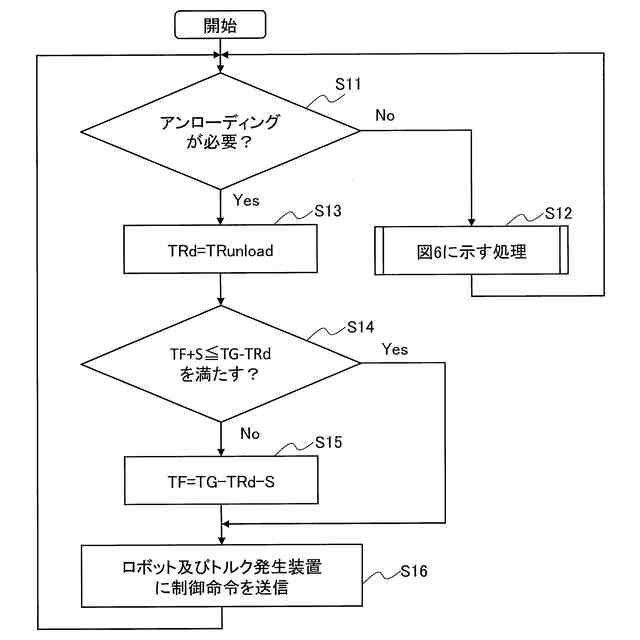
図1の制御装置によって実現される処理の流れの一例を示すフローチャート
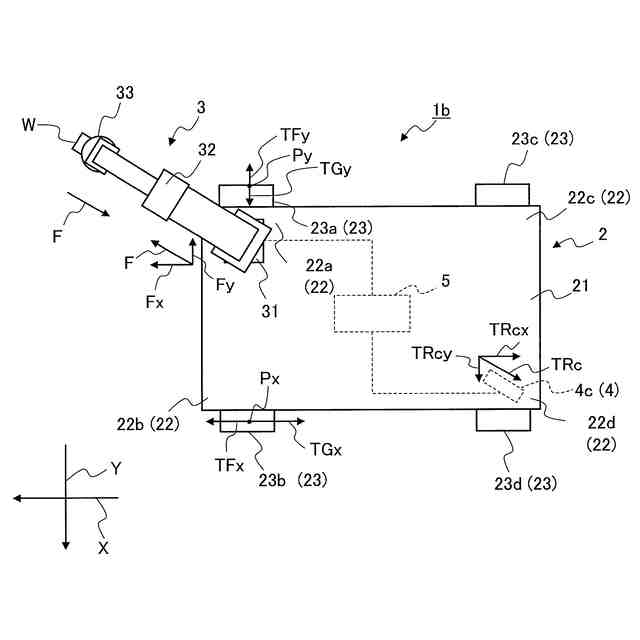
本発明の第2実施形態に係る移動ロボットシステムの全体構成を示す平面図
本発明の第3実施形態に係る移動ロボットシステムの全体構成を示す平面図
本発明の第3実施形態に係る制御装置によって実現される処理の流れの一例を示すフローチャート
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る
 特許ウォッチ
特許ウォッチ