TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082610
公報種別
公開特許公報(A)
公開日
2025-05-29
出願番号
2023196056
出願日
2023-11-17
発明の名称
多関節ロボット
出願人
株式会社リコー
代理人
個人
,
個人
,
個人
主分類
B25J
19/00 20060101AFI20250522BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットのケーブルに作用するストレスを低減してケーブルが損傷するのを抑制する。
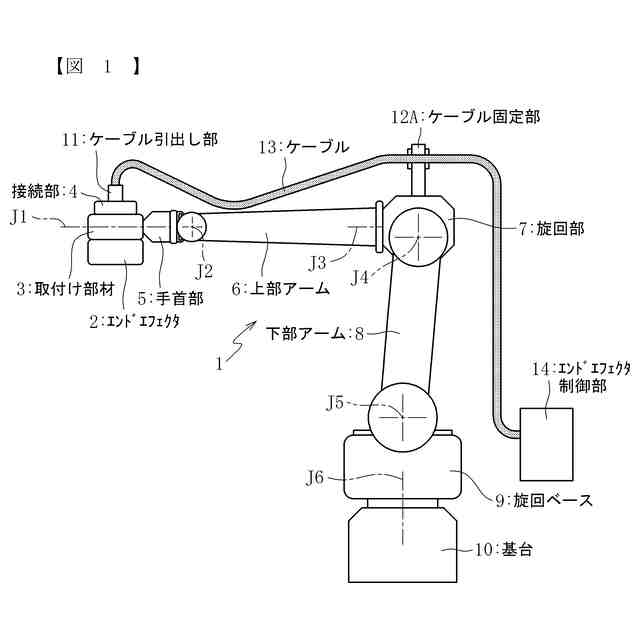
【解決手段】ロボットアームと、ロボットアームの先端に設けられた手首部5と、手首部5に取付けられたエンドエフェクタ2と、エンドエフェクタ2と地上に固定配置されたエンドエフェクタ制御部14とを接続するケーブル13とを有する多関節ロボットにおいて、ケーブル13の中間部を支持するケーブル固定部12A-12Dを、ロボットアームから離間した位置に配設したことを特徴とする多関節ロボット。
【選択図】図1
特許請求の範囲
【請求項1】
ロボットアームと、前記ロボットアームの先端に設けられた手首部と、前記手首部に取付けられたエンドエフェクタと、前記エンドエフェクタと地上に固定配置されたエンドエフェクタ制御部とを接続するケーブルとを有する多関節ロボットにおいて、
前記ケーブルの中間部を支持するケーブル固定部を、前記ロボットアームから離間した位置に配設したことを特徴とする多関節ロボット。
続きを表示(約 620 文字)
【請求項2】
前記多関節ロボットが、基台と、当該基台上に配設された旋回ベースと、当該旋回ベース上に配設された下部アームと、当該下部アームの上端部に配設された旋回部と、当該旋回部に配設された上部アームと、当該上部アームの先端に配設された手首部と、当該手首部に配設されたエンドエフェクタとを有することを特徴とする請求項1の多関節ロボット。
【請求項3】
前記旋回ベースに前記ケーブル固定部が配設されていることを特徴とする請求項2の多関節ロボット。
【請求項4】
前記ケーブル固定部に伸縮部材の一端が連結されると共に、当該伸縮部材の他端が、前記エンドエフェクタと前記ケーブル固定部との間の前記ケーブルの中間部に連結されていることを特徴とする請求項3の多関節ロボット。
【請求項5】
前記基台の側方に前記ケーブル固定部が立設されていることを特徴とする請求項2の多関節ロボット。
【請求項6】
前記ケーブル固定部に伸縮部材の一端が連結されると共に、当該伸縮部材の他端が、前記エンドエフェクタと前記ケーブル固定部との間の前記ケーブルの中間部に連結されていることを特徴とする請求項5の多関節ロボット。
【請求項7】
前記エンドエフェクタが、塗装用スプレーガン、スポット溶接用ガン又は手術用鉗子であることを特徴とする請求項1から6のいずれか1項の多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は多関節ロボットに関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
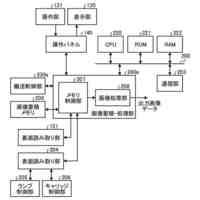
従来、多関節ロボットの先端にエンドエフェクタ(例えば塗装用スプレーガン、スポット溶接用ガンなど)を取付けた作業用多関節ロボットが多くの産業分野で多用されている(特許文献1参照)。例えば6軸の垂直多関節ロボットは、基台の上で垂直軸回りに旋回する旋回ベース(基本第1軸)と、この旋回ベースに取付けられて前後方向に揺動する下部アーム(基本第2軸)と、この下部アームの先端に取付けられて上下方向に揺動する上部アーム(基本第3軸)と、この上部アームの先端に取付けられ3自由度を有する手首部(手首第1軸~手首第3軸)とを備えている。手首部の先端に取付部を介して取付けられたエンドエフェクタは、任意の位置で任意の姿勢を取ることができ、自在に塗装、溶接等の作業を行うことができる。
【0003】
エンドエフェクタから引き出されたエンドエフェクタ側ケーブル(塗料用ホースや電線ケーブルなど)は、ロボット側からくるロボット側ケーブル(塗料用ホースや電線ケーブルなど)と接続されるが、これらケーブルにはロボットが稼働する際に過度なストレス(屈曲や引張り)が掛かる。そこで特許文献1(特開2015‐058515)の発明は、手首部(取付部とも言う)よりもエンドエフェクタ側で、エンドエフェクタ側ケーブルとロボット側ケーブルとを端子接続している。
【0004】
ロボットアームにおける上部アームよりも先端側に設けられる手首部や取付部は、多関節ロボットのなかでも他の部位に比べて駆動回数が多い。このため、上部アームよりも先端側に配設されるエンドエフェクタ側ケーブルは頻繁に屈曲することとなり、ロボット側ケーブルよりもストレスが掛かる頻度が高いからである。手首部よりもエンドエフェクタ側でケーブルを端子接続することで、エンドエフェクタ側ケーブルの屈曲・摩耗・損傷を抑制し、面倒な作業となるエンドエフェクタ側ケーブルの交換作業の回数を低減することでメンテナンス性を向上するようにしている。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、引用文献1のロボット側ケーブルは下部アームや上部アームに沿って配設されているので、下部アームや上部アームの作動によってロボット側ケーブルが屈曲・損傷することは避けられない。すなわち、旋回ベース(基本第1軸)と下部アーム(基本第2軸)との間や、下部アーム(基本第2軸)と上部アーム(基本第3軸)との間で、ロボット側ケーブルの屈曲・損傷が発生しやすい。本発明はかかる事情に鑑みてなされたものであり、ケーブルに作用するストレスを低減してケーブルが損傷するのを抑制することを目的とする。
【課題を解決するための手段】
【0006】
前記目的を達成するための本発明の多関節ロボットは、ロボットアームと、前記ロボットアームの先端に設けられた手首部と、前記手首部に取付けられたエンドエフェクタと、前記エンドエフェクタと地上に固定配置されたエンドエフェクタ制御部とを接続するケーブルとを有する多関節ロボットにおいて、前記ケーブルの中間部を支持するケーブル固定部を、前記ロボットアームから離間した位置に配設したことを特徴とする。
【発明の効果】
【0007】
本発明によれば、ケーブルに作用するストレスを低減してケーブルが損傷するのを抑制することができる。
【図面の簡単な説明】
【0008】
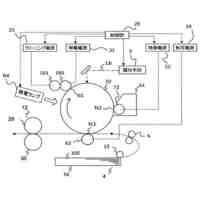
本発明の第1実施形態に係る多関節ロボットの概略図である。
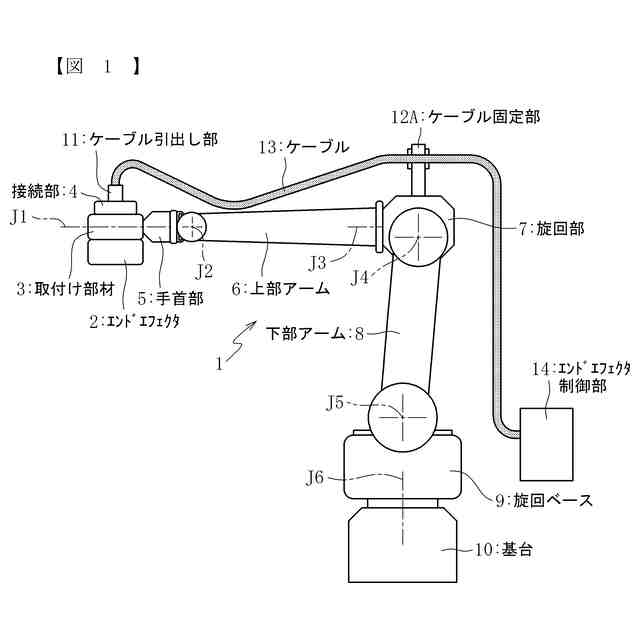
本発明の第2実施形態に係る多関節ロボットの概略図である。
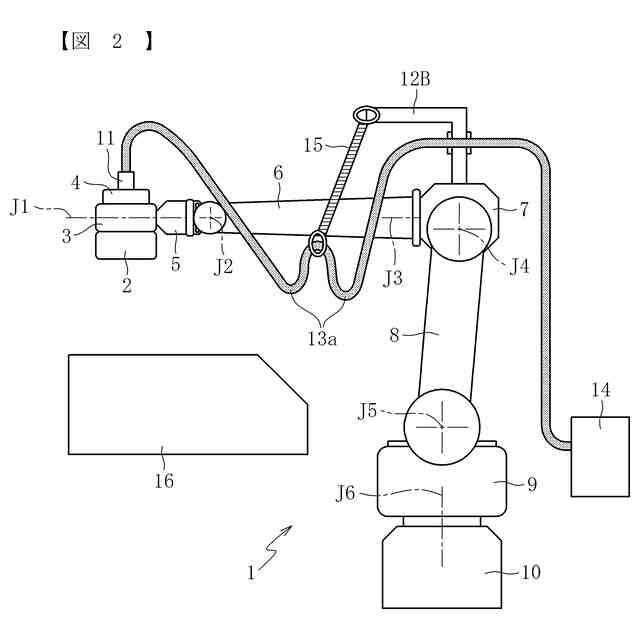
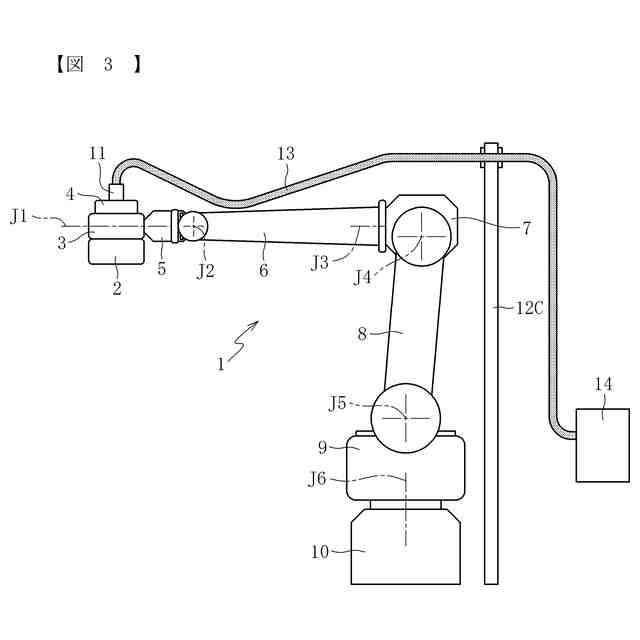
本発明の第3実施形態に係る多関節ロボットの概略図である。
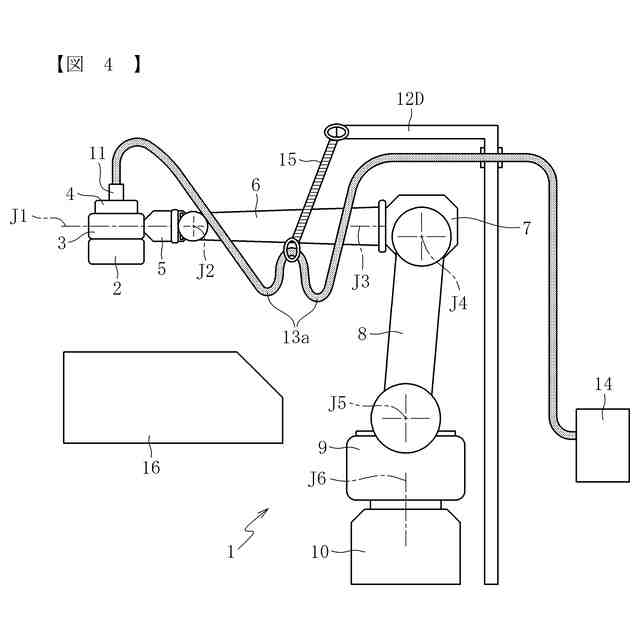
本発明の第4実施形態に係る多関節ロボットの概略図である。
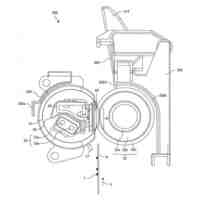
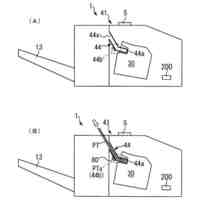
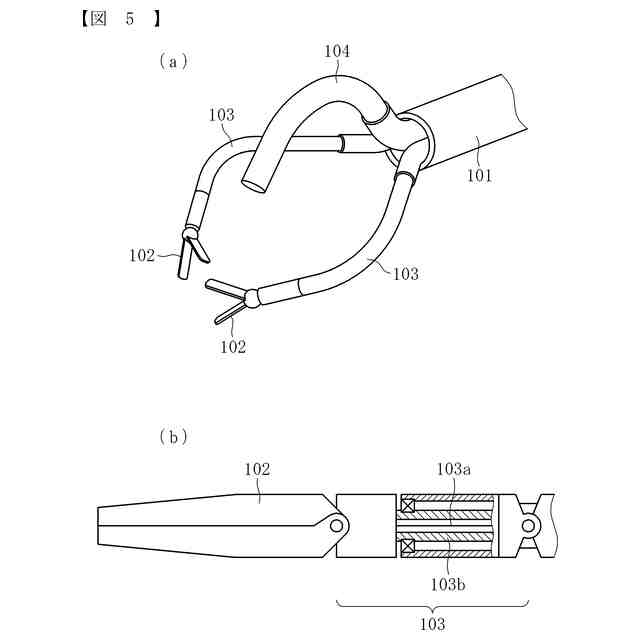
手術用ロボットのアーム遠位端に取付けられた鉗子の(a)斜視図と(b)拡大図である。
【発明を実施するための形態】
【0009】
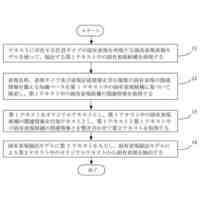
以下に、本発明の実施形態を図1~図4を参照して説明する。本発明の特徴は、多関節ロボットにケーブルを配設(艤装)する際に、ケーブルを固定するとケーブルダメージが発生しやすい、ケーブル引出し部11から後のロボットアームにはケーブルを固定しないことである。
【0010】
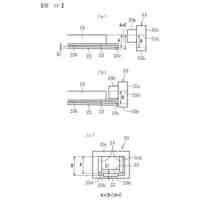
●第1実施形態
図1は本発明の第1実施形態に係る多関節ロボットの概略図である。多関節ロボット1は、図1に示すように複数のリンクと、各リンクを接続する複数の回転軸J1~J6を有する多関節ロボット(6軸の垂直多関節ロボット)である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社リコー
画像形成装置
11日前
株式会社リコー
画像形成装置
12日前
株式会社リコー
定着装置及び画像形成装置
12日前
株式会社リコー
画像読取装置及び画像形成装置
11日前
株式会社リコー
シート搬送装置及び画像形成装置
11日前
株式会社リコー
画像処理装置、および画像処理方法
11日前
株式会社リコー
加熱装置、定着装置及び画像形成装置
10日前
株式会社リコー
後処理装置、及び、画像形成システム
12日前
株式会社リコー
情報処理装置、開発支援システムおよびプログラム
11日前
株式会社リコー
固有表現抽出方法、固有表現抽出装置及びプログラム
3日前
株式会社リコー
情報提供システム、電子機器、情報提供方法、及びプログラム
4日前
株式会社リコー
伝送管理装置
3日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
10日前
株式会社リコー
液体塗布装置、液体塗布システム、液体塗布方法およびプログラム
10日前
株式会社リコー
ファクシミリ装置、情報処理システム、情報処理方法及びプログラム
11日前
株式会社リコー
足踏み検知装置、情報処理システム、足踏み検知方法および動画再生方法
12日前
株式会社リコー
情報処理装置、情報処理システム、情報処理方法、印刷媒体、及びプログラム
12日前
株式会社リコー
情報処理装置、印刷システム、印刷方法及びプログラム
9日前
株式会社リコー
データ管理システム、端末装置、プログラム、データ入力方法
10日前
株式会社リコー
情報処理装置、情報処理方法、プログラム、情報処理システム
10日前
株式会社リコー
コミュニケーション支援システム、コミュニケーション支援装置、コミュニケーション支援方法、及びプログラム
12日前
株式会社リコー
画像処理方法、プログラム、画像処理装置および画像処理システム
5日前
株式会社リコー
情報処理システム、情報処理装置、情報処理方法、プログラム、機器
3日前
株式会社ザイテック
吸着装置
24日前
株式会社ジャノメ
ロボット
13日前
個人
ペグハンマおよびペグハンマ用部品
17日前
株式会社ダイヘン
搬送装置
17日前
住友重機械工業株式会社
教示装置
10日前
川崎重工業株式会社
ロボット
11日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
10日前
工機ホールディングス株式会社
作業機
10日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
17日前
住友重機械工業株式会社
支援装置
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ