TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084233
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023197980
出願日
2023-11-22
発明の名称
ロボット
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アームの剛性を確保しつつ、アームをより軽量化することが可能なロボットを提供する。
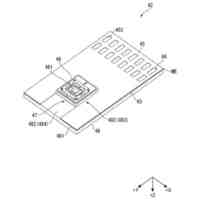
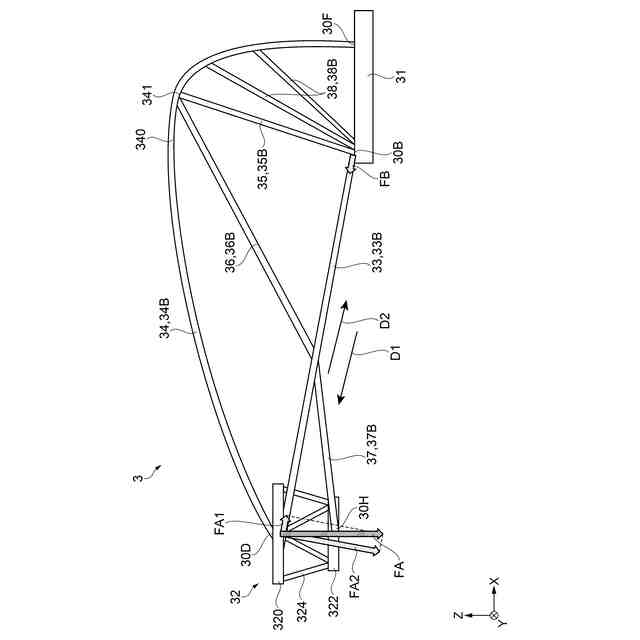
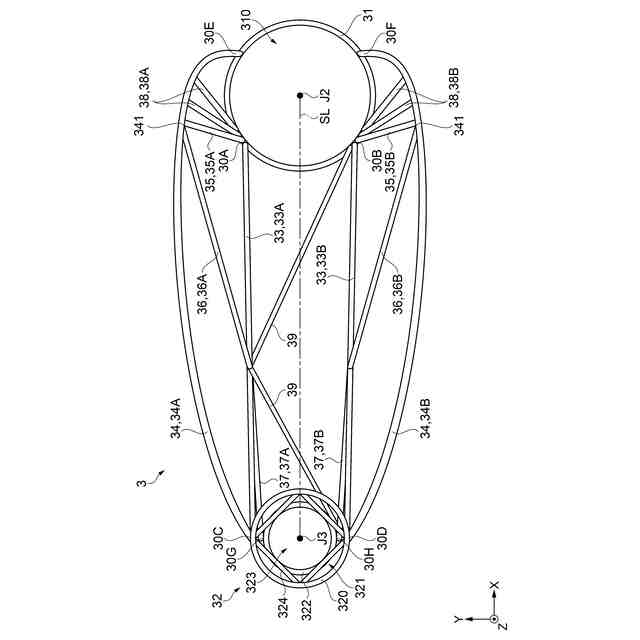
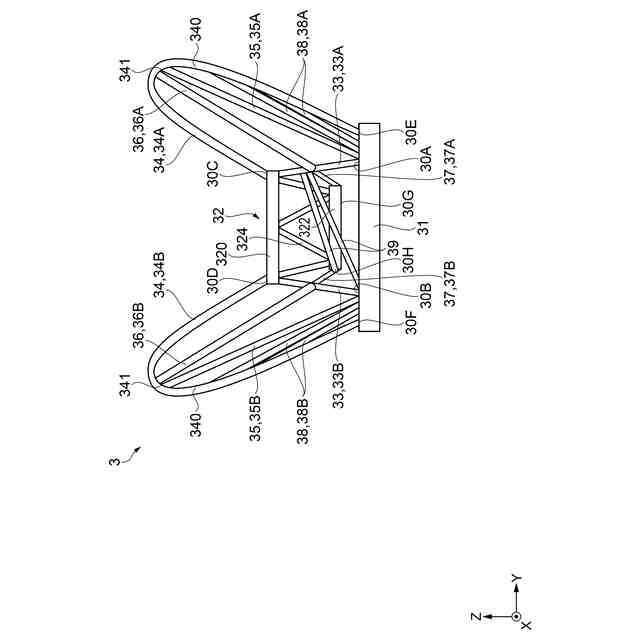
【解決手段】ロボットは、フレーム3を有する第2アームを備え、フレーム3は、複数の梁と、モーターが設置される第1設置部31と、ボールネジナットが設置される第2設置部32と、を有し、複数の梁は、第1設置部31と第2設置部32とに接続される第1梁33と、第1設置部31と第2設置部32とに接続され、第1梁33よりも鉛直方向の上方に位置し、上方に突出する形状である第2梁34と、を含み、第1梁33のうち、第2設置部32よりも第1設置部31に近い部分の方が、第1設置部31よりも第2設置部32に近い部分より鉛直方向の下方に位置する。
【選択図】図2
特許請求の範囲
【請求項1】
基台と、
前記基台に対し、第1回転軸回りに回転可能に接続される第1アームと、
フレームを有し、前記第1アームに対し、前記第1回転軸と平行な第2回転軸回りに回転可能に接続される第2アームと、
前記第2アームを、前記第1アームに対して前記第2回転軸回りに回転駆動する駆動部と、
前記第2アームにおいて前記第2回転軸から水平方向に離間した位置に配置されるシャフトと、
前記シャフトを移動可能に支持する支持部と、を備え、
前記フレームは、
複数の梁と、
前記駆動部が設置される第1設置部と、
前記支持部が設置される第2設置部と、を有し、
前記複数の梁は、
前記第1設置部と前記第2設置部とに接続される第1梁と、
前記第1設置部と前記第2設置部とに接続され、前記第1梁よりも鉛直方向の上方に位置し、上方に突出する形状である第2梁と、を含み、
前記第1梁のうち、前記第2設置部よりも前記第1設置部に近い部分の方が、前記第1設置部よりも前記第2設置部に近い部分に比べて、前記鉛直方向の下方に位置することを特徴とするロボット。
続きを表示(約 780 文字)
【請求項2】
前記複数の梁は、第3梁を含み、
前記第3梁の一端は、前記第1設置部に接続され、前記第3梁の他端は、前記第2梁に接続されることを特徴とする請求項1に記載のロボット。
【請求項3】
前記第3梁の前記他端は、前記第1設置部の上方に位置することを特徴とする請求項2に記載のロボット。
【請求項4】
前記第3梁の前記一端は、前記第1設置部と前記第1梁との接続部に接続されることを特徴とする請求項2に記載のロボット。
【請求項5】
前記複数の梁は、第4梁を含み、
前記第4梁の一端は、前記第1梁に接続され、前記第4梁の他端は、前記第2梁に接続されることを特徴とする請求項1に記載のロボット。
【請求項6】
前記第4梁の前記一端は、前記第1梁のうち、前記第1設置部との接続部と、前記第2設置部との接続部との間に接続されることを特徴とする請求項5に記載のロボット。
【請求項7】
前記複数の梁のうち、前記第2設置部に接続される梁の数よりも前記第1設置部に接続される梁の数のほうが多いことを特徴とする請求項1に記載のロボット。
【請求項8】
前記第2梁は、アーチ状であることを特徴とする請求項1から7のいずれか一項に記載のロボット。
【請求項9】
前記第2梁は、アーチ状であり、
前記第3梁の前記他端は、前記第2梁の頂部に接続されることを特徴とする請求項2から4のいずれか一項に記載のロボット。
【請求項10】
前記第2梁は、直線状の2本の梁からなり、
前記2本の梁は、所定の角度をもって接続されていることを特徴とする請求項1から7のいずれか一項に記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば、基台と、基台に対して第1回転軸回りに回転可能に接続される第1アームと、第1アームに対して第1回転軸と平行な第2回転軸回りに回転可能に接続される第2アームと、第2アームに支持されるシャフトと、を備えるロボットが知られている。このうち、第1アームと第2アームとで、ロボットアームが構成される。このようなロボットでは、ロボットアームの慣性力を減らし、より高速な移動に対応できるようにすることや、消費電力を抑制すること等の観点から、ロボットアームの各部の軽量化、特に第2アームの軽量化が求められている。
【0003】
従来、特許文献1に示すように、ボールスプラインナットとボールネジナットとを6本の支柱を介して連結されたメインフレームとサブフレームとによって支持し、メインフレームとサブフレームとの間に側壁がない構造とした第2アームを有するロボットが知られている。
【先行技術文献】
【特許文献】
【0004】
特開2020-142309号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のロボットでは、メインフレームとサブフレームと6本の支柱とを有するため、第2アームの軽量化に限界があった。そのため、第2アームの剛性を確保しつつ、第2アームをより軽量化することが望まれている。
【課題を解決するための手段】
【0006】
ロボットは、基台と、前記基台に対し、第1回転軸回りに回転可能に接続される第1アームと、フレームを有し、前記第1アームに対し、前記第1回転軸と平行な第2回転軸回りに回転可能に接続される第2アームと、前記第2アームを、前記第1アームに対して前記第2回転軸回りに回転駆動する駆動部と、前記第2アームにおいて前記第2回転軸から水平方向に離間した位置に配置されるシャフトと、前記シャフトを移動可能に支持する支持部と、を備え、前記フレームは、複数の梁と、前記駆動部が設置される第1設置部と、前記支持部が設置される第2設置部と、を有し、前記複数の梁は、前記第1設置部と前記第2設置部とに接続される第1梁と、前記第1設置部と前記第2設置部とに接続され、前記第1梁よりも鉛直方向の上方に位置し、上方に突出する形状である第2梁と、を含み、前記第1梁のうち、前記第2設置部よりも前記第1設置部に近い部分の方が、前記第1設置部よりも前記第2設置部に近い部分に比べて、前記鉛直方向の下方に位置する。
【図面の簡単な説明】
【0007】
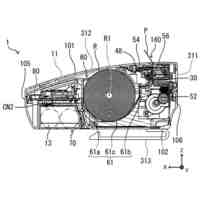
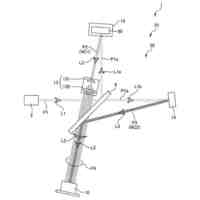
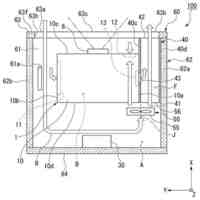
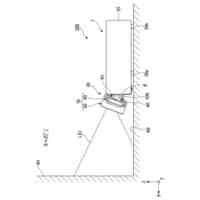
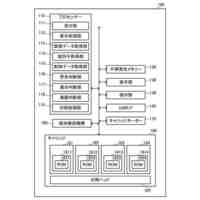
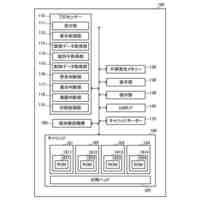
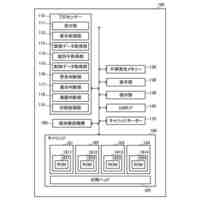
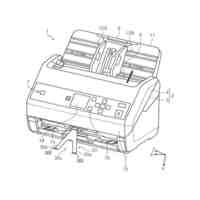
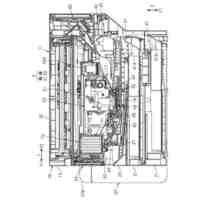
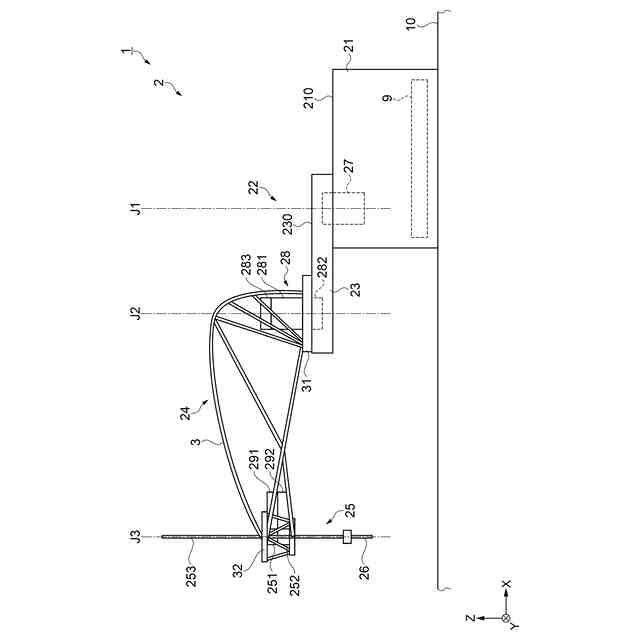
第1実施形態に係るロボットシステムの全体図。
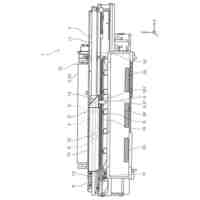
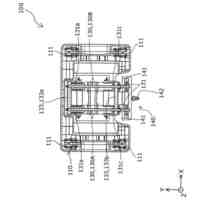
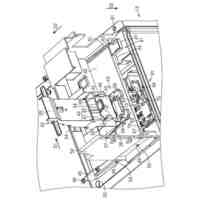
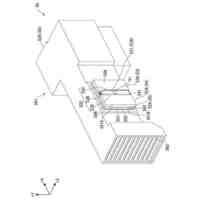
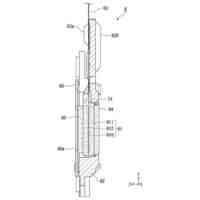
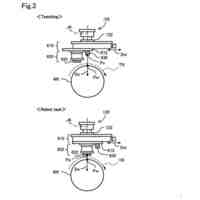
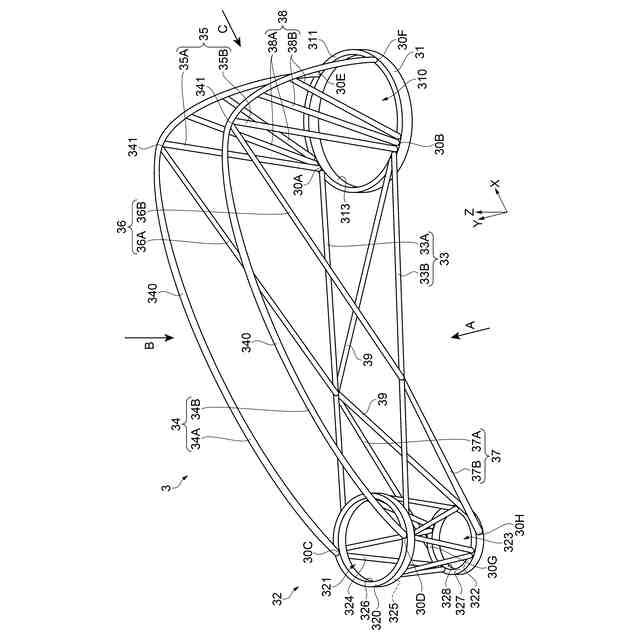
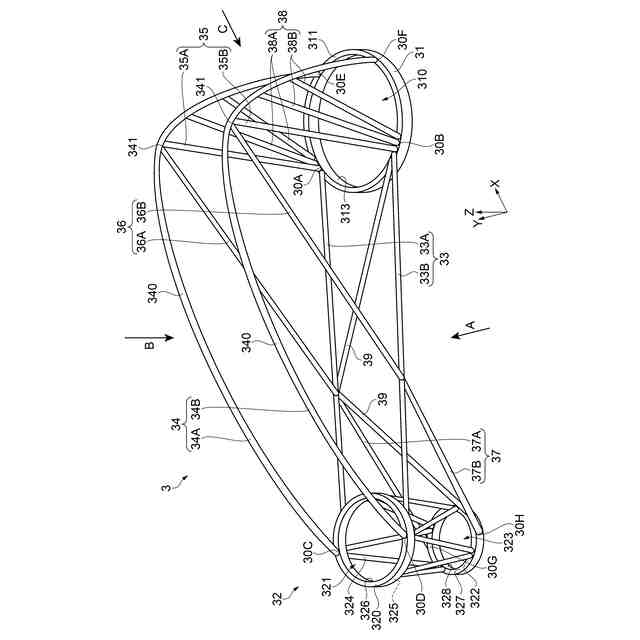
第1実施形態に係る第2アームのフレームを示す斜視図。
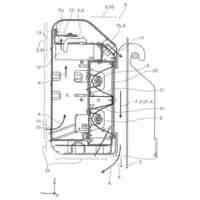
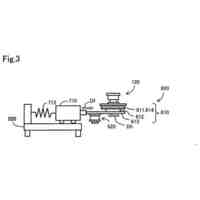
第2アームのフレームを図2中のA方向に見た側面図。
第2アームのフレームを図2中のB方向に見た平面図。
第2アームのフレームを図2中のC方向に見た背面図。
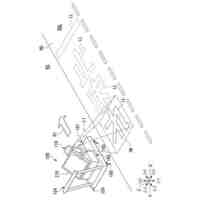
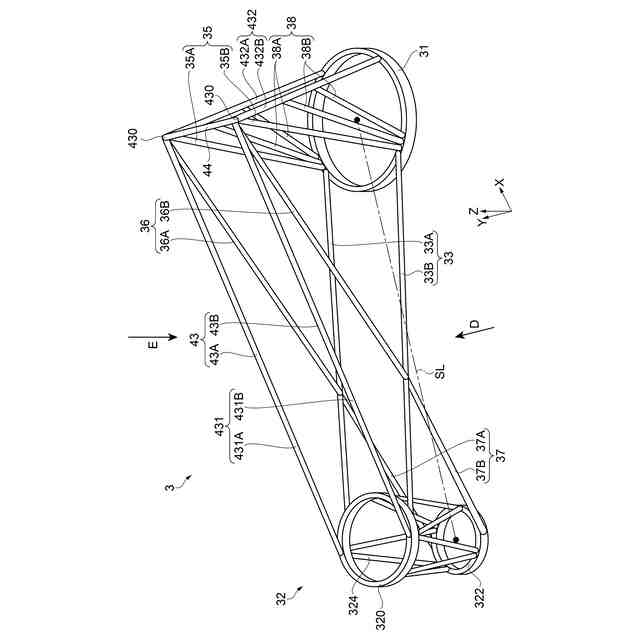
第2実施形態に係る第2アームのフレームを示す斜視図。
第2アームのフレームを図6中のD方向に見た側面図。
【発明を実施するための形態】
【0008】
1.第1実施形態
図1は、第1実施形態に係るロボット2を含むロボットシステム1の全体図である。図2は、ロボット2が有する第2アーム24のフレーム3を示す斜視図である。図3は、フレーム3を図2中のA方向(Y軸方向)に見た側面図である。図4は、フレーム3を図2中のB方向(Z軸方向)に見た平面図である。図5は、フレーム3を図2中のC方向(X軸方向)に見た背面図である。
【0009】
図1中では、互いに直交する3軸であるX軸、Y軸およびZ軸が設定されており、図2~図5中にもそれぞれ同様の3軸が示されている。3軸のうちZ軸方向は鉛直方向を示し、X-Y平面は水平面を示す。
【0010】
図1~図3および図5中の上下方向は、鉛直方向と一致している。図1~図3および図5中の上側である+Z方向側を「上」、下側である-Z方向側を「下」とも言う。ロボットアーム22、第1アーム23および第2アーム24等については、図1~図4中の右側である+X方向側を「基端」または「基端部」、左側である-X方向側を「先端」または「先端部」と言う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セイコーエプソン株式会社
印刷装置
18日前
セイコーエプソン株式会社
記録装置
18日前
セイコーエプソン株式会社
印刷装置
18日前
セイコーエプソン株式会社
記録装置
18日前
セイコーエプソン株式会社
投射システム
18日前
セイコーエプソン株式会社
液体吐出装置
4日前
セイコーエプソン株式会社
レーザー干渉計
4日前
セイコーエプソン株式会社
レーザー干渉計
4日前
セイコーエプソン株式会社
プロジェクター
4日前
セイコーエプソン株式会社
レーザー照射装置
18日前
セイコーエプソン株式会社
ロール体運搬用台車
今日
セイコーエプソン株式会社
分周回路および発振器
4日前
セイコーエプソン株式会社
記録装置及び記録方法
6日前
セイコーエプソン株式会社
三次元造形物の製造方法
18日前
セイコーエプソン株式会社
プロジェクションシステム
3日前
セイコーエプソン株式会社
印刷方法および印刷システム
今日
セイコーエプソン株式会社
画像読取装置および画像読取方法
今日
セイコーエプソン株式会社
媒体給送装置、及び、その制御方法
今日
セイコーエプソン株式会社
液体吐出装置及び液体吐出システム
3日前
セイコーエプソン株式会社
反射型スクリーンおよび投射システム
3日前
セイコーエプソン株式会社
プログラマブルゲインアンプ及び回路装置
4日前
セイコーエプソン株式会社
プロジェクションシステム、および調整機構
3日前
セイコーエプソン株式会社
波長変換装置、光源装置及びプロジェクター
6日前
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
今日
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
今日
セイコーエプソン株式会社
機能素子実装デバイス、光源装置及び投射装置
6日前
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
今日
セイコーエプソン株式会社
印刷システム、印刷物生産方法及びプログラム
今日
セイコーエプソン株式会社
液晶装置、光変調装置、およびプロジェクター
4日前
セイコーエプソン株式会社
ロボットを制御する方法、及び、ロボットシステム
今日
セイコーエプソン株式会社
表示制御方法、表示装置、及び表示制御プログラム
6日前
セイコーエプソン株式会社
ロボットを制御する方法、及び、ロボットシステム
今日
セイコーエプソン株式会社
画像読取装置
18日前
セイコーエプソン株式会社
液体噴射装置
3日前
セイコーエプソン株式会社
プロジェクター
3日前
セイコーエプソン株式会社
時系列データ処理方法、学習方法、処理システム及び学習システム
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ