TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025110066
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024003782
出願日
2024-01-15
発明の名称
ロボットを制御する方法、及び、ロボットシステム
出願人
セイコーエプソン株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20250718BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】圧電アクチュエーターの非通電時の保持力を維持する技術を提供する。
【解決手段】本開示の方法は、(a)ロボットアームの先端に装着されたツール部に含まれる圧電アクチュエーターについて、非通電時の保持力が十分か否かを判定する工程と、(b)保持力が不十分であると判定された場合に、圧電アクチュエーターの保持力回復動作を実行する工程と、(c)保持力が十分であると判定された場合に、ワークに対するロボット作業を実行する工程と、を含む。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットを制御する方法であって、
(a)ロボットアームの先端に装着されたツール部に含まれる圧電アクチュエーターについて、非通電時の保持力が十分か否かを判定する工程と、
(b)前記保持力が不十分であると判定された場合に、前記圧電アクチュエーターの保持力回復動作を実行する工程と、
(c)前記保持力が十分であると判定された場合に、ワークに対するロボット作業を実行する工程と、
を含む、方法。
続きを表示(約 1,400 文字)
【請求項2】
請求項1に記載の方法であって、
前記ツール部は、前記圧電アクチュエーターの前記保持力が作用する保持力作用部材を含み、
前記工程(a)は、
(a1)前記保持力作用部材に対して、前記保持力が働く保持力方向と逆の方向に沿って外力を印加しながら、力センサーによる前記外力の測定値である力測定値を取得する工程と、
(a2)前記力測定値を用いて前記保持力が十分か否かを判定する工程と、
を含む、方法。
【請求項3】
請求項1に記載の方法であって、
前記ツール部は、前記圧電アクチュエーターの前記保持力が作用する保持力作用部材と、前記保持力作用部材の位置を測定する位置センサーとを含み、
前記工程(a)は、
(a1)前記保持力作用部材に対して、前記保持力が働く保持力方向と逆の方向に沿って外力を印加しながら、前記位置センサーの測定値である位置測定値を取得する工程と、
(a2)前記位置測定値を用いて前記保持力が十分か否かを判定する工程と、
を含む、方法。
【請求項4】
請求項1に記載の方法であって、
前記ツール部は、前記圧電アクチュエーターの前記保持力が作用する保持力作用部材を含み、
前記工程(a)は、
(a1)前記保持力作用部材に対して、前記保持力が働く保持力方向と逆の方向に沿って加速度を加えるように前記ロボットアームを動作させながら、加速度センサーによる前記加速度の測定値である加速度測定値を取得する工程と、
(a2)前記加速度測定値を用いて前記保持力が十分か否かを判定する工程と、
を含む、方法。
【請求項5】
請求項1に記載の方法であって、
前記保持力回復動作は、前記圧電アクチュエーターの前記保持力が作用する保持力作用部材の移動ストロークが、前記ロボット作業における前記保持力作用部材の移動ストロークよりも大きくなるように実行される、方法。
【請求項6】
請求項1に記載の方法であって、
前記工程(c)は、前記圧電アクチュエーターを非通電状態に維持した状態で、前記ロボットのエンドエフェクターによる作業を実行する工程を含む、方法。
【請求項7】
請求項1に記載の方法であって、
前記ツール部は、インク吐出ヘッドを含み、
前記ロボット作業は、前記インク吐出ヘッドを用いて前記ワークの表面のうちの曲面部分を含む印刷領域に印刷を実行する処理である、方法。
【請求項8】
ロボットシステムであって、
ロボットアームを含むロボットと、
圧電アクチュエーターを含み、前記ロボットアームの先端に装着されたツール部と、
制御装置と、
を備え、
前記制御装置は、
(a)前記圧電アクチュエーターについて、非通電時の保持力が十分か否かを判定する処理と、
(b)前記保持力が不十分であると判定された場合に、前記圧電アクチュエーターの保持力回復動作を実行する処理と、
(c)前記保持力が十分であると判定された場合に、ワークに対するロボット作業を実行する処理と、
を実行するように構成されている、ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットを制御する方法、及び、ロボットシステムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、ロボットアームの先端部に圧電アクチュエーターを備えたロボットが開示されている。圧電アクチュエーターは、ロボットの手先の位置誤差を補償するために使用される。
【先行技術文献】
【特許文献】
【0003】
特開平3-228588号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
圧電アクチュエーターは、非通電時にも保持力を維持できるという利点がある。しかし、圧電アクチュエーターを動作させない状態では、圧電アクチュエーターの保持力が時間経過に伴って低下する。圧電アクチュエーターの保持力が低下すると、ロボット動作時の慣性力や外力が大きい場合に圧電アクチュエーターの位置がずれてしまい、その位置精度が悪化するという問題があった。
【課題を解決するための手段】
【0005】
本開示の第1の形態によれば、ロボットを制御する方法が提供される。この方法は、(a)ロボットアームの先端に装着されたツール部に含まれる圧電アクチュエーターについて、非通電時の保持力が十分か否かを判定する工程と、(b)前記保持力が不十分であると判定された場合に、前記圧電アクチュエーターの保持力回復動作を実行する工程と、(c)前記保持力が十分であると判定された場合に、ワークに対するロボット作業を実行する工程と、を含む。
【0006】
本開示の第2の形態によれば、ロボットシステムが提供される。このロボットシステムは、ロボットアームを含むロボットと、圧電アクチュエーターを含み、前記ロボットアームの先端に装着されたツール部と、制御装置と、を備える。前記制御装置は、(a)前記圧電アクチュエーターについて、非通電時の保持力が十分か否かを判定する処理と、(b)前記保持力が不十分であると判定された場合に、前記圧電アクチュエーターの保持力回復動作を実行する処理と、(c)前記保持力が十分であると判定された場合に、ワークに対するロボット作業を実行する処理と、を実行するように構成されている。
【図面の簡単な説明】
【0007】
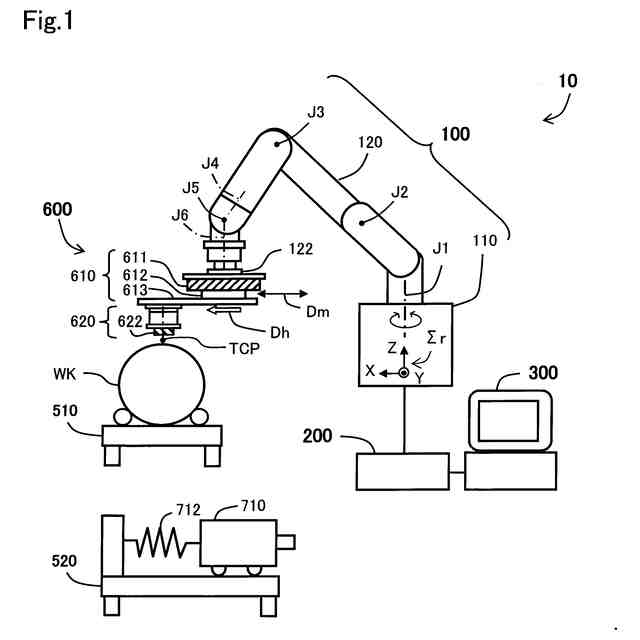
実施形態におけるロボットシステムの構成を示す説明図。
実施形態における情報処理装置の機能ブロック図。
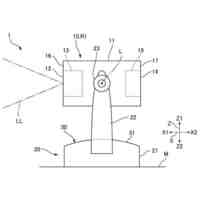
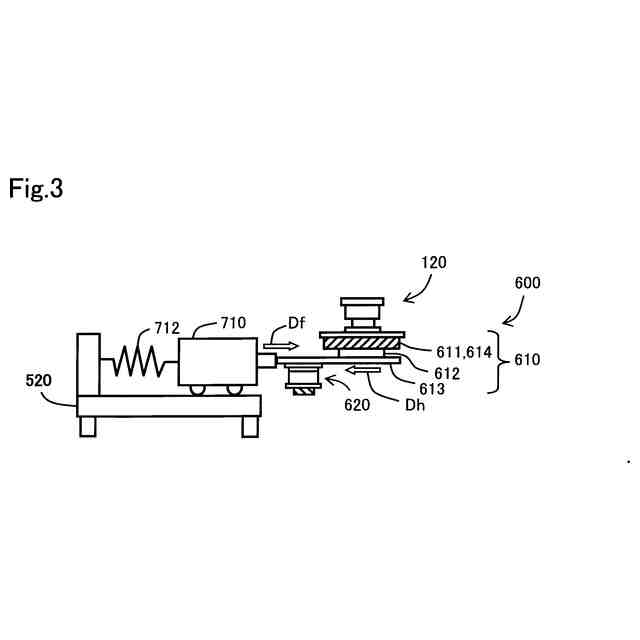
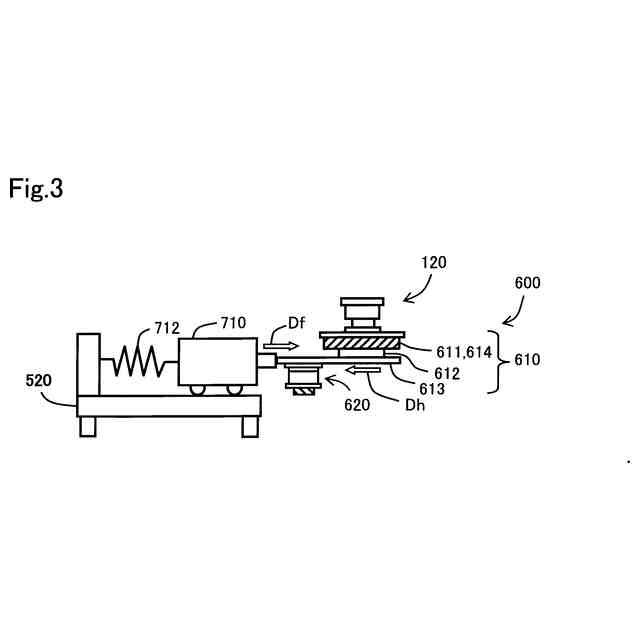
第1実施形態における保持力確認時の状態を示す説明図。
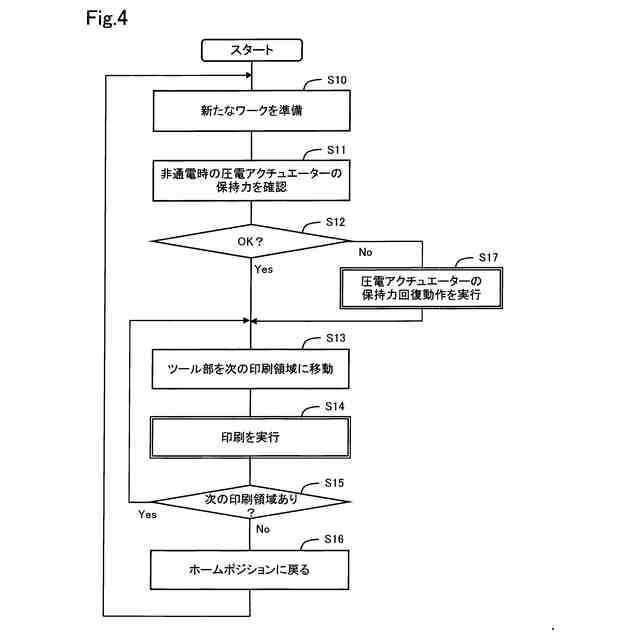
ロボット作業の処理手順を示すフローチャート。
第2実施形態における保持力確認時の状態を示す説明図。
第3実施形態における保持力確認時の状態を示す説明図。
【発明を実施するための形態】
【0008】
A.第1実施形態:
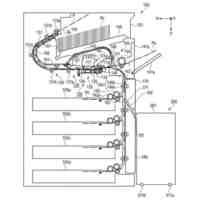
図1は、一実施形態におけるロボットシステムの一例を示す説明図である。このロボットシステム10は、ロボット100と、ロボット100を制御するロボットコントローラー200と、情報処理装置300と、ワークWKを載置する第1架台510と、力センサー710を載置する第2架台520とを備える。情報処理装置300は、例えばパーソナルコンピューターである。
【0009】
図1には、3次元空間の直交座標系を規定する3つの軸X,Y,Zが描かれている。X軸とY軸は水平方向の軸であり、Z軸は鉛直方向の軸である。この例では、XYZ座標系は、ロボット100に予め設定された基準点を原点とするロボット座標系である。
【0010】
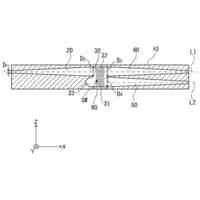
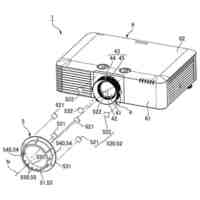
ロボット100は、基台110と、ロボットアーム120と、を備えている。ロボットアーム120の先端部122には、ツール部600が装着されている。ツール部600は、移動装置610と、エンドエフェクターとしてのインク吐出装置620と、を有する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
セイコーエプソン株式会社
電子時計
今日
セイコーエプソン株式会社
流体デバイス
今日
セイコーエプソン株式会社
インク収容体
今日
セイコーエプソン株式会社
媒体給送装置及び記録装置
今日
セイコーエプソン株式会社
スタンド付きプロジェクター
今日
セイコーエプソン株式会社
プロジェクターおよび固定部材
今日
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
1か月前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
2か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
住友重機械工業株式会社
教示装置
27日前
株式会社ダイヘン
搬送装置
1か月前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
28日前
学校法人五島育英会
アーム機構
2か月前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
27日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
オークラ輸送機株式会社
ハンド装置
2か月前
ホシデン株式会社
分解用治具
1か月前
株式会社マキタ
電気機器
28日前
アピュアン株式会社
衝撃工具
1か月前
株式会社スター精機
産業用ロボット
2か月前
オークラ輸送機株式会社
ハンド装置
1か月前
積水ハウス株式会社
フィルム除去具
今日
株式会社不二越
協働ロボットシステム
5日前
株式会社マキタ
電動作業機
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ