TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025090217
公報種別
公開特許公報(A)
公開日
2025-06-17
出願番号
2023205313
出願日
2023-12-05
発明の名称
ロボットシステム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20250610BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアームを大きく移動させることなく、容器に配置されたワークを保持することが可能なロボットシステムを提供する。
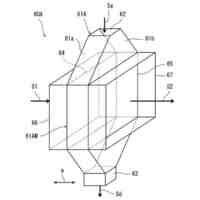
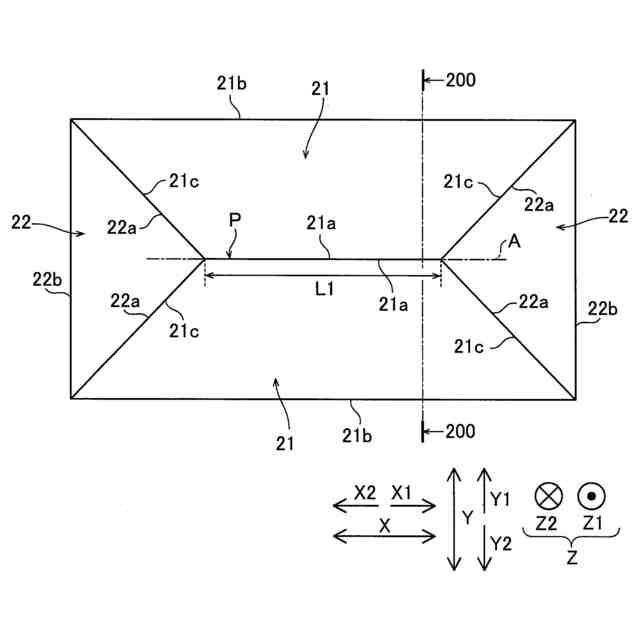
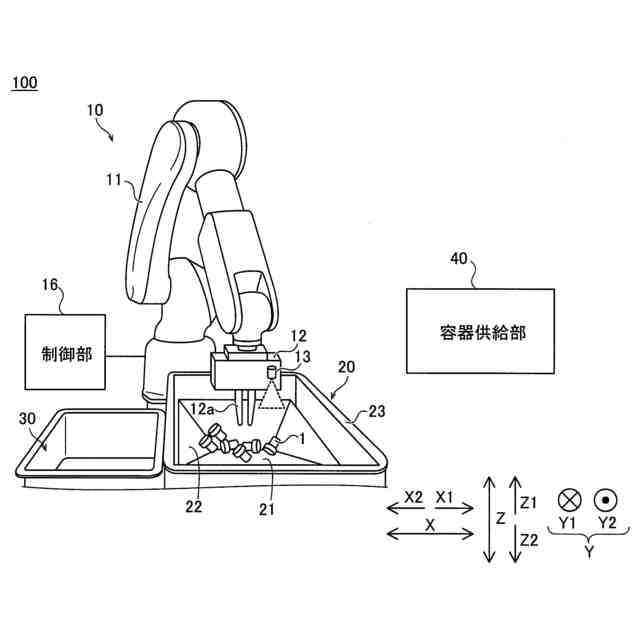
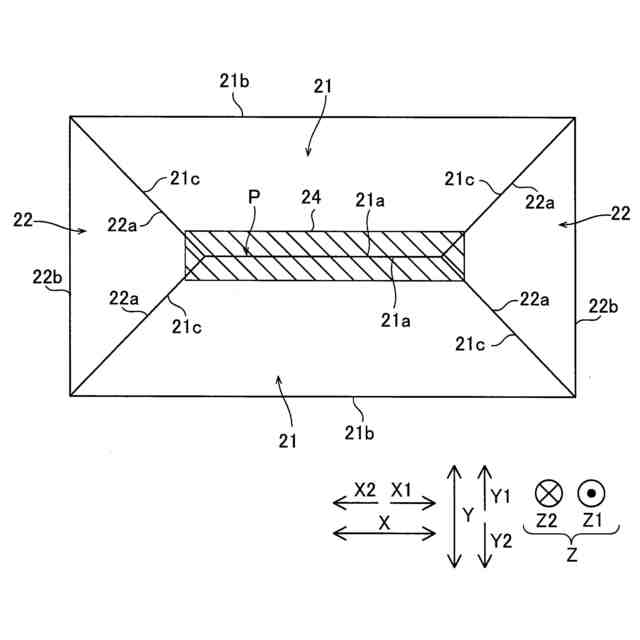
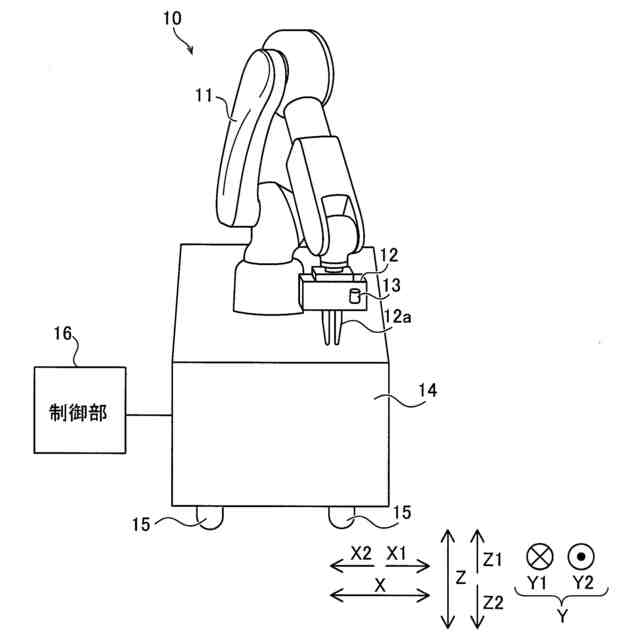
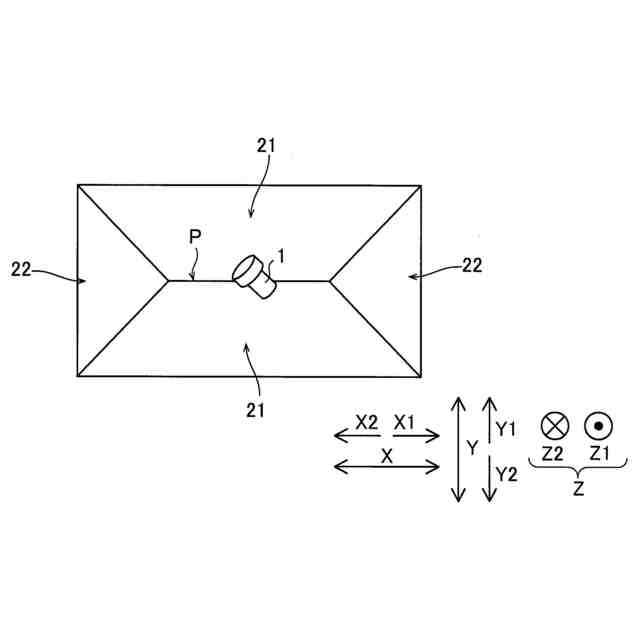
【解決手段】このロボットシステム100は、ロボットアーム11と、ロボットアーム11に取り付けられ、ワーク1を保持するハンド12と、上方から見て、X方向に沿って延びる直線A上に、下端の辺21aが接する一対の第1傾斜面21と、一対の第1傾斜面21の下端の辺21aの端部に接続される一対の辺22aを各々有する一対の第2傾斜面22と、により取り囲まれるワーク収容空間Sを含む容器20と、容器20のワーク収容空間Sに配置されたワーク1をハンド12によって保持させる制御を実行する制御部16と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットアームと、
前記ロボットアームに取り付けられ、ワークを保持するハンドと、
上方から見て、所定の方向に沿って延びる直線上に、下端の辺が接する一対の第1傾斜面と、前記一対の第1傾斜面の下端の辺の端部に接続される一対の辺を各々有する一対の第2傾斜面と、により取り囲まれるワーク収容空間を含む容器と、
前記容器の前記ワーク収容空間に配置された前記ワークを前記ハンドによって保持させる制御を実行する制御部と、を備える、ロボットシステム。
続きを表示(約 1,200 文字)
【請求項2】
前記一対の第1傾斜面は、台形形状を有し、
前記一対の第2傾斜面は、三角形形状を有する、請求項1に記載のロボットシステム。
【請求項3】
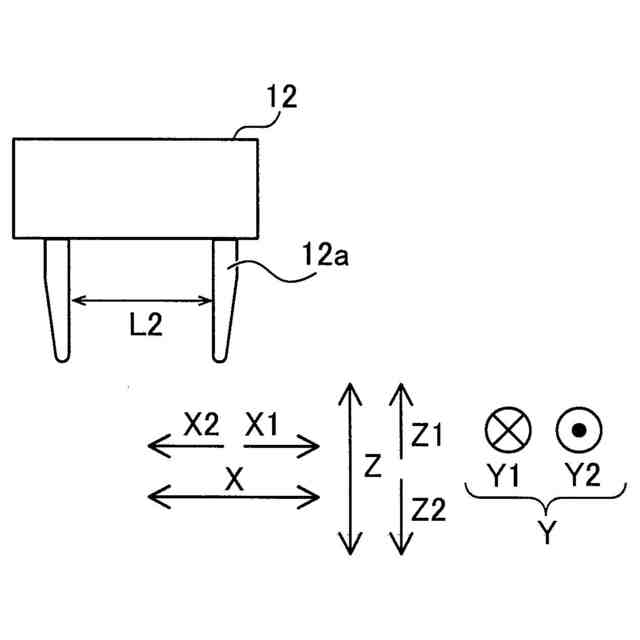
前記ハンドは、前記所定の方向に沿って開閉するチャックを含み、
前記チャックの前記所定の方向に沿った開閉の範囲の長さは、前記第1傾斜面の下端の辺の長さ以上である、請求項1に記載のロボットシステム。
【請求項4】
前記制御部は、前記一対の第1傾斜面の下端の辺同士が接する位置に配置された前記ワークを前記チャックにより保持させる処理を実行する、請求項3に記載のロボットシステム。
【請求項5】
前記容器に配置された前記ワークの2次元の画像を撮像する撮像部を備え、
前記制御部は、前記撮像部に撮像された画像に基づいて、前記ワークが前記一対の第1傾斜面の下端の辺同士が接する位置からずれた位置に配置されていると判定した場合、前記チャックによって前記ワークを前記一対の第1傾斜面の下端の辺同士が接する位置に移動させる処理を実行する、請求項4に記載のロボットシステム。
【請求項6】
前記容器に配置された前記ワークの2次元の画像を撮像する撮像部を備え、
前記制御部は、前記撮像部に撮像された画像に基づいて、前記ワークが前記一対の第1傾斜面と前記第2傾斜面とが接する位置に配置されていると判定した場合、前記チャックによって前記ワークを前記一対の第1傾斜面の下端の辺同士が接する位置に移動させる処理を実行する、請求項4に記載のロボットシステム。
【請求項7】
前記容器は、前記一対の第1傾斜面および前記一対の第2傾斜面に跨るように配置される標識を含み、
前記容器に配置された前記ワークおよび前記標識の2次元の画像を撮像する撮像部を備え、
前記制御部は、前記撮像部に撮像された画像に基づいて、前記標識上に前記ワークが配置されているか否かを判定する、請求項1に記載のロボットシステム。
【請求項8】
前記制御部は、前記標識上に前記ワークが配置されていないと判定した場合、前記ロボットアームにより前記ワークを補充させる動作を実行させる、請求項7に記載のロボットシステム。
【請求項9】
前記標識は、前記容器に塗布された塗料を含み、
前記標識の色と、前記一対の第1傾斜面および前記一対の第2傾斜面の色とは互いに異なる、請求項7に記載のロボットシステム。
【請求項10】
前記ロボットアームが載置される台車部と、
前記台車部を移動させる移動部と、備え、
前記制御部は、前記ロボットアームを前記容器の近傍まで前記移動部により移動させる処理を実行する、請求項1に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットシステムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、容器内に配置されるワークを保持するハンドが取り付けられるロボットシステムが開示されている。特許文献1には、バラ積みされたワークを保持するロボットシステムが開示されている。このロボットシステムは、ワークを保持するチャック型のハンドと、ハンドが取り付けられるロボットアームとを備えている。特許文献1では、ワークは、容器内に配置されている。容器の底面は、水平方向に沿った正方形の底面と、正方形の底面の各辺に接続され底面に交差する4つの傾斜面とを、含む。これにより、容器が傾斜面を含むことにより、バラ積みされたワークは、容器の底面の中央部に集合する。このため、ロボットアームが大きく移動することなく、底面の中央部に集合したワークをハンドに保持することが可能になる。
【先行技術文献】
【特許文献】
【0003】
特開2017-201276号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている容器の底面は、水平方向に沿った正方形の底面と、正方形の底面の各辺に接続され底面に交差する4つの傾斜面とを、含んでいる。この場合、水平方向に沿った底面と傾斜面との境界近傍にワークが停止し水平方向に沿った底面までワークが移動しない場合がある。また、底面が水平方向に沿っているので、ワークが水平方向に沿った底面のいずれの位置で停止するのかが定まらない。このようにワークの位置がばらつくため、ロボットアームを比較的大きく移動させなければ、ワークをハンドに保持することができないという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアームを大きく移動させることなく、容器に配置されたワークを保持することが可能なロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるロボットシステムは、ロボットアームと、ロボットアームに取り付けられ、ワークを保持するハンドと、上方から見て、所定の方向に沿って延びる直線上に、下端の辺が接する一対の第1傾斜面と、一対の第1傾斜面の下端の辺の端部に接続される一対の辺を各々有する一対の第2傾斜面と、により取り囲まれるワーク収容空間を含む容器と、容器のワーク収容空間に配置されたワークをハンドによって保持させる制御を実行する制御部と、を備える。
【0007】
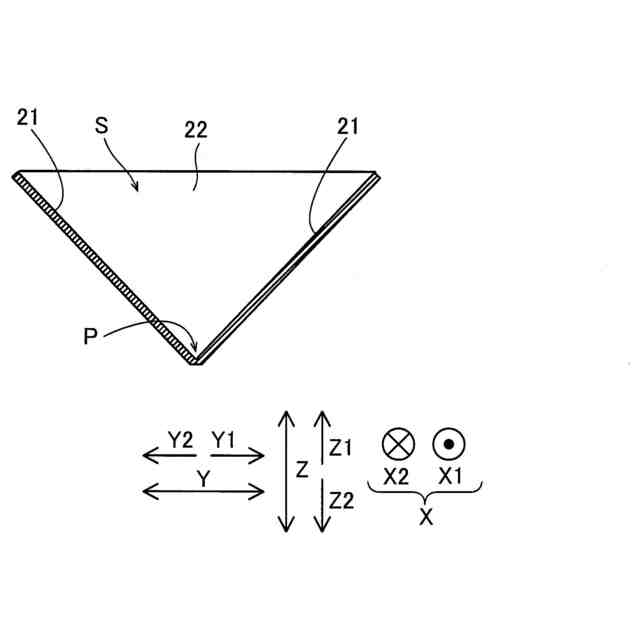
この開示の一の局面によるロボットシステムは、上記のように、容器が、上方から見て、所定の方向に沿って延びる直線上に、下端の辺が接する一対の第1傾斜面と、一対の第1傾斜面の下端の辺の端部に接続される一対の辺を各々有する一対の第2傾斜面と、により取り囲まれるワーク収容空間を含む。これにより、ワーク収容空間が、下端の辺同士が接する一対の第1傾斜面によって下方に尖った先端を有する形状となるので、水平方向に沿った底面を有する場合と異なり、ワークは第1傾斜面または第2傾斜面に沿って一対の第1傾斜面の下端の辺同士が接する部分である比較的定まった位置に移動する。これにより、ロボットアームを大きく移動させることなく、容器に配置されたワークを保持することができる。
【発明の効果】
【0008】
本開示のロボットシステムは、ロボットアームを大きく移動させることなく、容器に配置されたワークを保持することができる。
【図面の簡単な説明】
【0009】
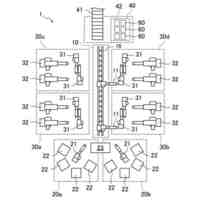
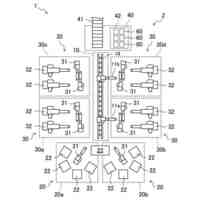
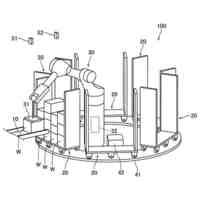
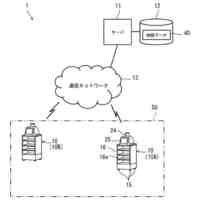
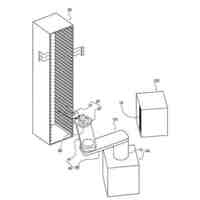
一実施形態によるロボットシステムを示す図である。
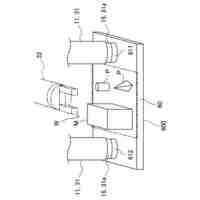
一実施形態による容器を上方から見た図である。
図2に示す容器の200-200線に沿った断面図である。
一実施形態による標識が配置された状態の容器を上方から見た図である。
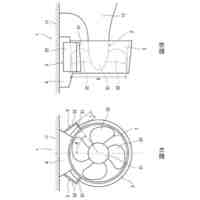
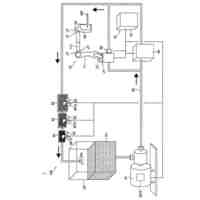
一実施形態によるロボットを示す図である。
一実施形態によるチャックが最大限開いた状態を示す図である。
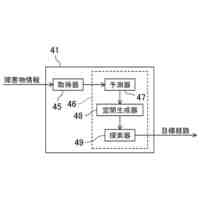
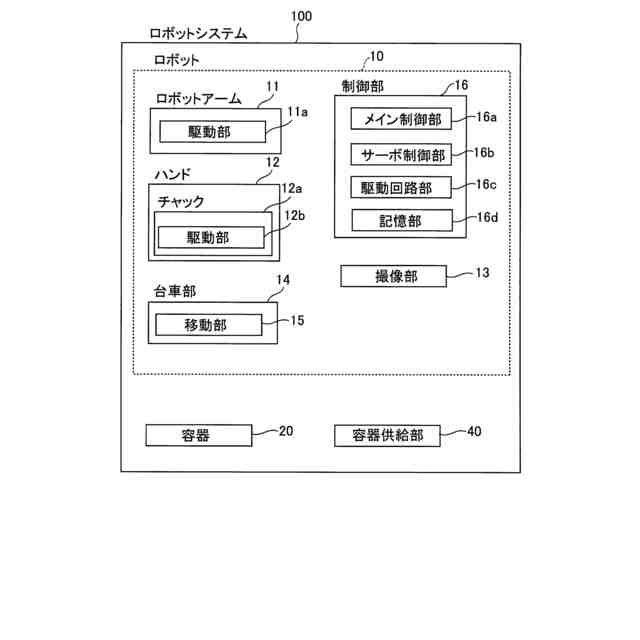
一実施形態によるロボットシステムの制御ブロック図である。
一対の第1傾斜面の下端の辺同士が接する位置に配置されたワークを示す図である。
撮像部に撮像された、ワークが配置されていない状態の標識を示す図である。
撮像部に撮像された、ワークが配置されている状態の標識を示す図である。
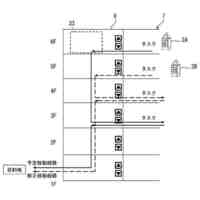
ロボットアームによりワークを補充する前の状態を示す図である。
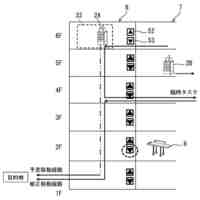
ロボットアームによりワークを補充した後の状態を示す図である。
容器の第1傾斜面側にワークが止まっている状態を示す図である。
容器の第1傾斜面と第2傾斜面との境界にワークが止まっている状態を示す図である。
変形例による容器を上方から見た図である。
変形例によるワークの供給方法を説明するための図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。なお、本願明細書において、上下方向をZ方向とする。上方側をZ1側とし、下方側をZ2側とする。Z方向に直交する方向をX方向とする。X方向の一方側をX1側とし、他方側をX2側とする。Z方向およびX方向に直交する方向をY方向とする。Y方向の一方側をY1側とし、他方側をY2側とする。なお、X方向は、所定の方向の一例である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
作業設備
1日前
川崎重工業株式会社
ロボット
23日前
川崎重工業株式会社
搬送システム
1日前
川崎重工業株式会社
燃料供給設備
22日前
川崎重工業株式会社
液化ガス運搬船
22日前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
GHG排出量推定装置
23日前
川崎重工業株式会社
二酸化炭素分離システム
今日
川崎重工業株式会社
プロペラダクトの支持構造
1か月前
川崎重工業株式会社
大気中二酸化炭素分離回収設備
今日
川崎重工業株式会社
大気中二酸化炭素分離回収設備
今日
川崎重工業株式会社
大気中二酸化炭素分離回収設備
今日
川崎重工業株式会社
パレット及びロボットシステム
1日前
川崎重工業株式会社
浸炭製品の硬さ予測装置及び方法
今日
川崎重工業株式会社
溶接器具の冷却システムおよびロボットシステム
7日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
22日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
22日前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
3日前
川崎重工業株式会社
ロボットシステムおよびロボットシステムの制御方法
1か月前
川崎重工業株式会社
情報処理装置
15日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
23日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
23日前
川崎重工業株式会社
経路計画装置、運転支援システム、経路計画方法及び経路計画プログラム
3日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
29日前
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
15日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び自律ロボットの制御プログラム
29日前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
25日前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
2か月前
住友重機械工業株式会社
教示装置
22日前
個人
ペグハンマおよびペグハンマ用部品
29日前
株式会社ダイヘン
搬送装置
29日前
川崎重工業株式会社
ロボット
23日前
東京都公立大学法人
対象物把持装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ