TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103108
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220220
出願日
2023-12-27
発明の名称
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
出願人
川崎重工業株式会社
,
SEQSENSE株式会社
代理人
弁理士法人有古特許事務所
主分類
G05D
1/435 20240101AFI20250702BHJP(制御;調整)
要約
【課題】エレベータを備えた施設内において、移動ロボットを含む各移動体が全体として効率良く移動できるようにする。
【解決手段】ロボット移動システムは、昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、優先移動体による前記エレベータの利用予定に関する情報に基づいて、前記移動ロボットの前記エレベータを使った移動経路を変更することで前記移動ロボットの予定移動経路を変更するように構成された処理回路を備える。
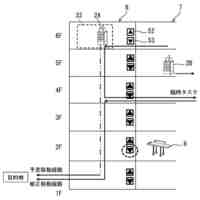
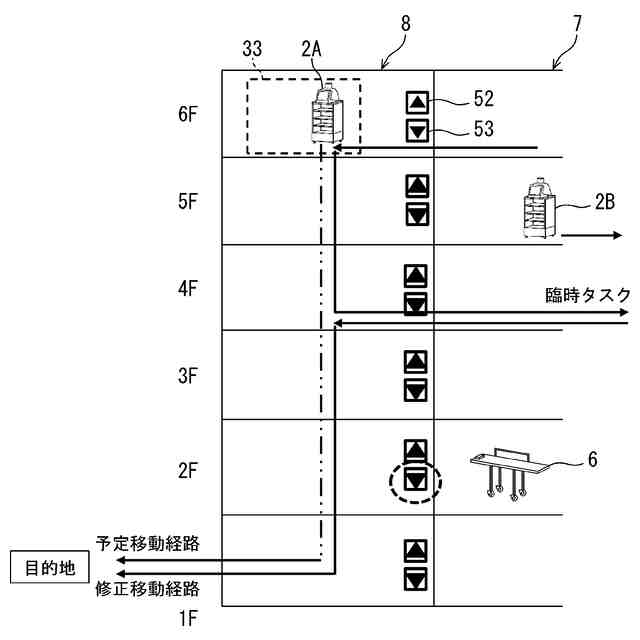
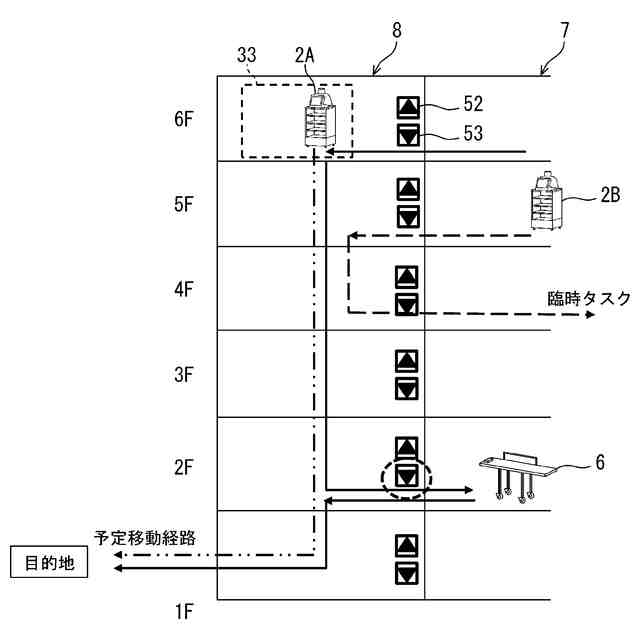
【選択図】図6
特許請求の範囲
【請求項1】
昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、
優先移動体による前記エレベータの利用予定に関する情報に基づいて、前記移動ロボットの前記エレベータを使った移動経路を変更することで前記移動ロボットの予定移動経路を変更するように構成された処理回路を備える、ロボット移動システム。
続きを表示(約 1,800 文字)
【請求項2】
前記処理回路は、前記優先移動体が前記エレベータを利用予定であり、かつ、前記エレベータ利用時の前記移動ロボットの移動方向が前記優先移動体の存在する階に向けた方向である、との条件が成立するか否かを判定するように構成され、
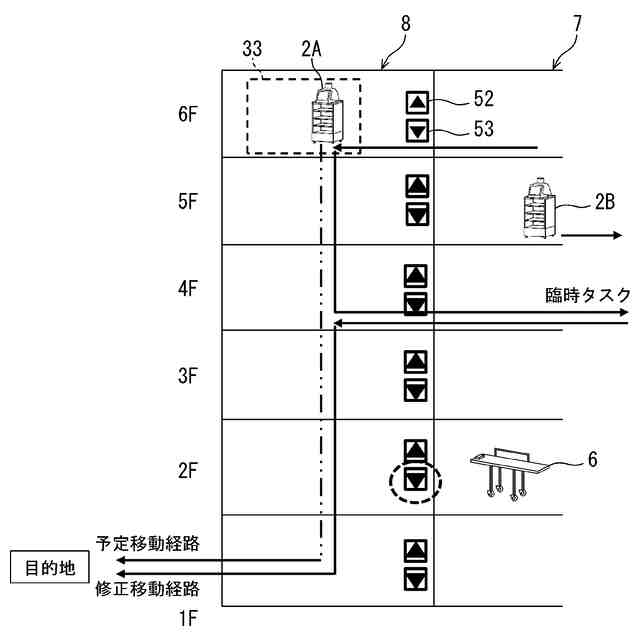
前記予定移動経路を変更することは、前記条件が成立すると判定されると、前記移動ロボットが前記昇降カゴに乗り込む階と前記優先移動体の存在する前記階との間の特定途中階で前記昇降カゴから降りるように前記予定移動経路を変更すること、を含む、請求項1に記載のロボット移動システム。
【請求項3】
前記処理回路は、前記施設内の複数のタスクを取得するように構成され、
前記予定移動経路を変更することは、前記条件が成立すると判定されると、前記特定途中階のエレベータホールを始点とした目的地までの移動を含むタスクであって、前記複数のタスクから前記移動ロボットに割り当てるタスクを再決定することを含む、請求項2に記載のロボット移動システム。
【請求項4】
前記処理回路は、
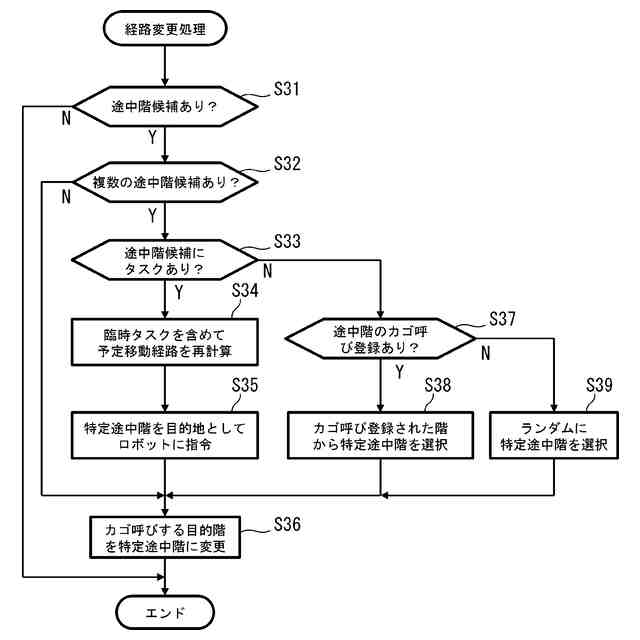
前記移動ロボットが前記昇降カゴに乗り込む階と前記優先移動体の存在する前記階との間に複数の途中階候補があるか否かを判定することと、
前記移動ロボットに割り当てられていない前記施設内のタスクを取得することと、を更に行うように構成され、
前記予定移動経路を変更することは、前記複数の途中階候補から前記タスクの存在する階を前記特定途中階として選択することを含む、請求項2に記載のロボット移動システム。
【請求項5】
前記処理回路は、
前記移動ロボットが前記昇降カゴに乗り込む階と前記優先移動体の存在する前記階との間に複数の途中階候補があるか否かを判定することと、
前記途中階候補のうち前記昇降カゴの呼出しが発生した階があるか否かを判定することと、を行うように構成され、
前記予定移動経路を変更することは、前記複数の途中階候補から前記呼出しが発生した階を前記特定途中階として選択することを含む、請求項2に記載のロボット移動システム。
【請求項6】
前記処理回路は、前記移動ロボットが前記エレベータを利用する予定の時刻である利用予定時刻と、前記優先移動体が前記エレベータを利用する予定の時刻である利用予定時刻と、を取得するように構成され、
前記予定移動経路を変更することは、前記移動ロボットの前記利用予定時刻と前記優先移動体の前記利用予定時刻との間の時間差が所定の閾値未満であると判定されると、前記予定移動経路を変更することを含む、請求項1乃至5のいずれか1項に記載のロボット移動システム。
【請求項7】
前記予定移動経路を変更することは、前記移動ロボットが前記昇降カゴに乗っているときに、前記予定移動経路を変更することを含む、請求項1乃至5のいずれか1項に記載のロボット移動システム。
【請求項8】
昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、
優先移動体と前記エレベータとの間の相対位置関係が所定条件を満たすと判定されると、前記移動ロボットを予定された目的階とは異なる階で前記昇降カゴから降りさせる指令を出力するように構成された処理回路を備える、ロボット移動システム。
【請求項9】
昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、
優先移動体と前記エレベータとの間の相対位置関係が所定条件を満たすと判定されると、前記施設内の複数のタスクに基づいて前記昇降カゴから前記移動ロボットを降りさせる階を決定するように構成された処理回路を備える、ロボット移動システム。
【請求項10】
昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに自律移動させる方法であって、
優先移動体による前記エレベータの利用予定に関する情報に基づいて、前記移動ロボットの前記エレベータを使った移動経路を変更することで前記移動ロボットの予定移動経路を変更する、ロボット移動方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボット移動システム、ロボット移動方法及びロボット移動プログラムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
近年、エレベータが設置された建物において、自走式のロボットがエレベータを利用して当該建物内の他階に移動し、様々な作業を行うシステムが提案されている。特許文献1では、自走式のロボットがエレベータを利用する際にロボットと一般利用者との同乗を回避させるエレベータシステムが開示されている。具体的には、ロボットが乗り込んだエレベータのカゴが行先階に到着する前に何れかの階のエレベータ乗場で一般利用者がカゴ呼びを登録すると、カゴを最寄り階で停止させてロボットを降りさせる。
【先行技術文献】
【特許文献】
【0003】
特開2020-109034号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の構成では、カゴに乗り込んだロボットが行先階に到着する前に途中階で降りる状況が頻繁に発生するため、移動効率が低下してしまう可能性がある。
【0005】
そこで本開示の一態様は、エレベータを備えた施設内において、移動ロボットを含む各移動体が全体として効率良く移動できるようにすることを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様に係るロボット移動システムは、昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、優先移動体による前記エレベータの利用予定に関する情報に基づいて、前記移動ロボットの前記エレベータを使った移動経路を変更することで前記移動ロボットの予定移動経路を変更するように構成された処理回路を備える。
【0007】
本開示の他の態様に係るロボット移動システムは、昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、優先移動体と前記エレベータとの間の相対位置関係が所定条件を満たすと判定されると、前記移動ロボットを予定された目的階とは異なる階で前記昇降カゴから降りさせる指令を出力するように構成された処理回路を備える。
【0008】
本開示の更に他の態様に係るロボット移動システムは、昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに移動させるシステムであって、優先移動体と前記エレベータとの間の相対位置関係が所定条件を満たすと判定されると、前記施設内の複数のタスクに基づいて前記昇降カゴから前記移動ロボットを降りさせる階を決定するように構成された処理回路を備える。
【0009】
本開示の一態様に係るロボット移動方法は、昇降カゴを有するエレベータを備えた複数階の施設内で移動ロボットに自律移動させる方法であって、優先移動体による前記エレベータの利用予定に関する情報に基づいて、前記移動ロボットの前記エレベータを使った移動経路を変更することで前記移動ロボットの予定移動経路を変更する。
【0010】
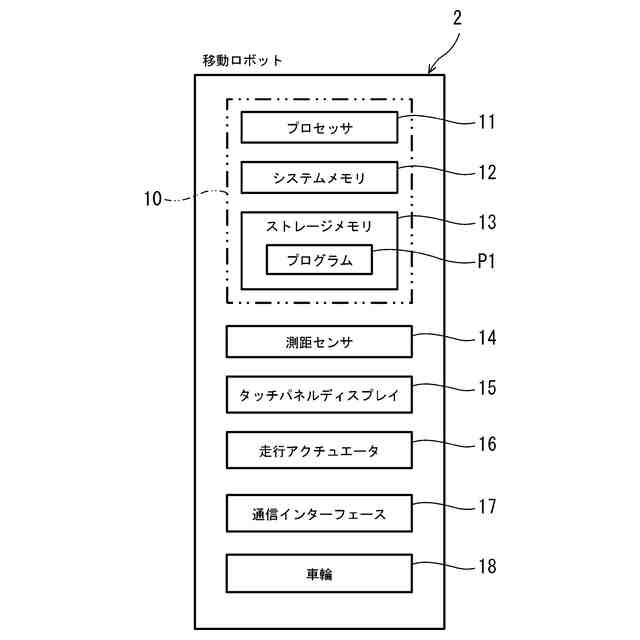
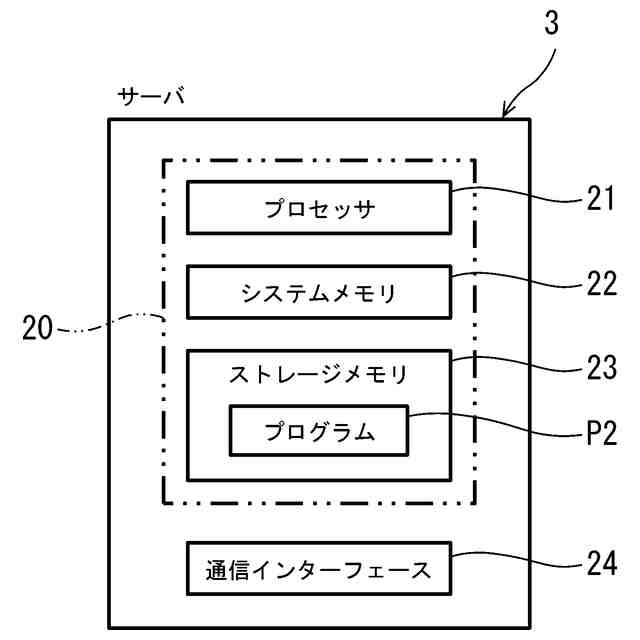
本開示の一態様に係るロボット移動プログラムは、前記方法を少なくとも1つのプロセッサに実行させる。前記プログラムは、コンピュータ読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータ(例えば、携帯情報端末、パーソナルコンピュータ、サーバ等)に内蔵又は外付けされ得る。前記記憶媒体は、RAM、ROM、EEPROM、ストレージ等を含み、例えば、ハードディスク、フラッシュメモリ、光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体とネットワーク(例えば、インターネット)を介して接続されたコンピュータにおいて実行されてもよい。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
川崎重工業株式会社
ロボット
10日前
川崎重工業株式会社
燃料供給設備
9日前
川崎重工業株式会社
液化ガス運搬船
9日前
川崎重工業株式会社
GHG排出量推定装置
10日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
9日前
川崎重工業株式会社
ロボットシステム及びロボットシステムの制御方法
9日前
川崎重工業株式会社
情報処理装置
2日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
10日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
10日前
SEQSENSE株式会社
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
16日前
川崎重工業株式会社
基板搬送ロボット、異常検出方法、および、プログラム
2日前
株式会社FUJI
工作機械
25日前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
1日前
ローム株式会社
半導体集積回路
1か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
ペダル機構
1か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
25日前
キヤノン電子株式会社
加工装置、及び、制御方法
10日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社鷺宮製作所
制御装置
24日前
株式会社オプトン
制御プログラム生成装置
23日前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
23日前
株式会社ダイフク
物品搬送設備
23日前
株式会社ダイフク
物品搬送設備
16日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社タブチ
減圧弁
2か月前
シンフォニアテクノロジー株式会社
異常検知装置
23日前
オムロン株式会社
安全装置
23日前
株式会社計数技研
移動体、及びプログラム
1か月前
WHILL株式会社
電動モビリティ
2か月前
三菱電機株式会社
電源回路
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ