TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025099435
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216099
出願日
2023-12-21
発明の名称
自律ロボットシステム、自律ロボットの制御方法及び制御プログラム
出願人
SEQSENSE株式会社
,
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
G05D
1/69 20240101AFI20250626BHJP(制御;調整)
要約
【課題】自律ロボット同士の相互干渉及び自律ロボットの待機状態の長期化を防止すべく、通信遅延による誤判断を無くす。
【解決手段】自律ロボットシステムは、タスク要求の発生中において所定の待機条件が成立すると、前記第1自律ロボットを前記タスクの実施を待機する待機状態にし、所定の判定処理を実施するように構成され、前記判定処理は、データの更新時刻と、第1自律ロボットのステータスが待機状態となった開始時刻である第1待機開始時刻と、の間の時間的な前後関係を判定することと、前記第1待機開始時刻と、前記第1待機開始時刻よりも後であると判定された前記更新時刻に対応する前記データの第2待機開始時刻と、の間の時間的な前後関係の判定結果、又は、第2自律ロボットが待機状態であるか否かの判定結果に基づいて、前記第1自律ロボットの前記待機状態の解除を決定することと、を含む。
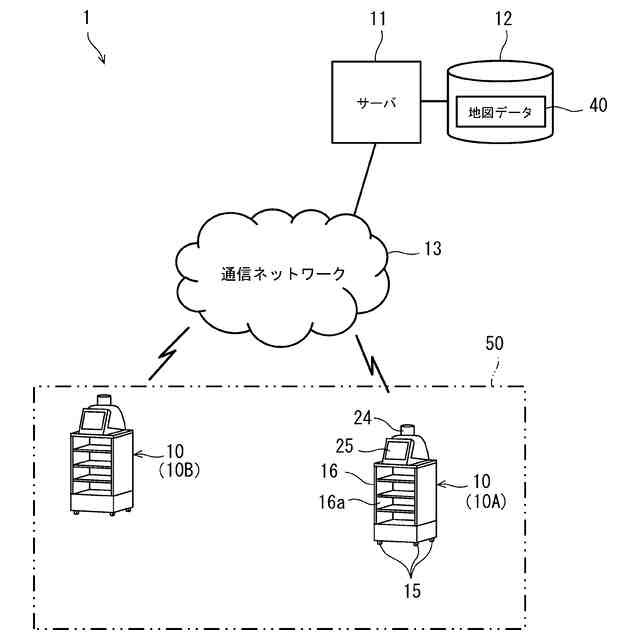
【選択図】図1
特許請求の範囲
【請求項1】
第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施する自律ロボットシステムであって、
前記第1自律ロボットに対するタスク要求に基づいて前記第1自律ロボットを制御するように構成された処理回路を備え、
前記処理回路は、
前記第2自律ロボットのステータスと前記ステータスが待機状態となった開始時刻である第2待機開始時刻とを示すデータを、前記データの更新時刻とともに周期的に取得することと、
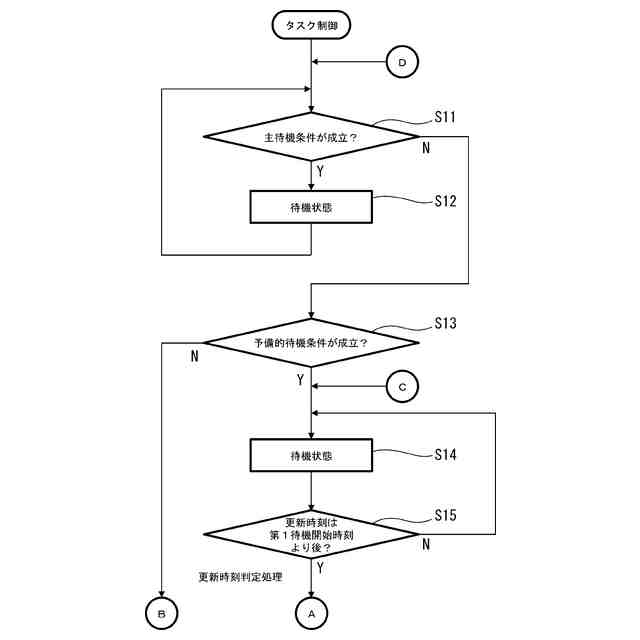
前記タスク要求の発生中において所定の待機条件が成立すると、前記第1自律ロボットを前記タスクの実施を待機する待機状態にし、所定の判定処理を実施することと、を行うように構成され、
前記判定処理は、
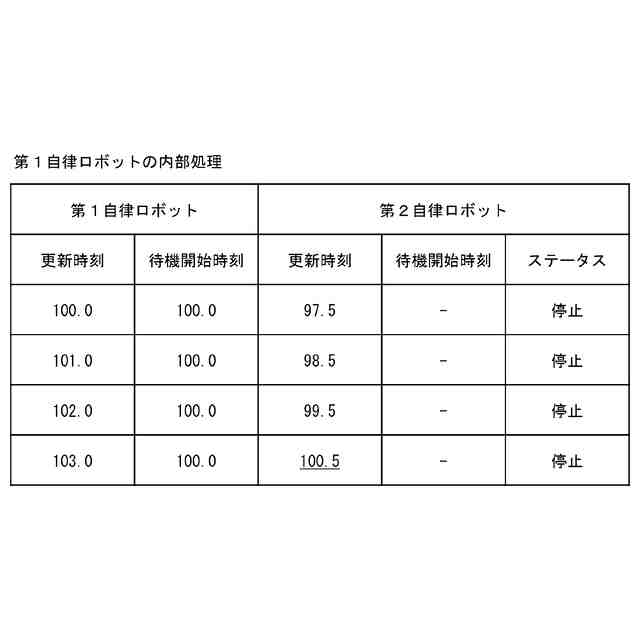
前記データの前記更新時刻と、前記第1自律ロボットのステータスが待機状態となった開始時刻である第1待機開始時刻と、の間の時間的な前後関係を判定することと、
前記第1待機開始時刻と、前記第1待機開始時刻よりも後であると判定された前記更新時刻に対応する前記データの前記第2待機開始時刻と、の間の時間的な前後関係の判定結果、又は、前記第2自律ロボットが前記待機状態であるか否かの判定結果に基づいて、前記第1自律ロボットの前記待機状態の解除を決定することと、を含む、自律ロボットシステム。
続きを表示(約 2,700 文字)
【請求項2】
前記判定処理は、更新時刻判定処理であり、
前記更新時刻判定処理は、
前記データの前記更新時刻が前記第1待機開始時刻よりも前であると判定されると、前記第1自律ロボットの前記待機状態を維持することと、
前記データの前記更新時刻が前記第1待機開始時刻よりも後であると判定されると、所定の待機解除判定処理を実施することと、を含み、
前記待機解除判定処理は、
前記第1待機開始時刻が、前記第1待機開始時刻よりも後であると判定された前記更新時刻に対応する前記データの前記第2待機開始時刻よりも後であると判定されると、前記第1自律ロボットの前記待機状態を維持することと、
前記第2自律ロボットの前記待機状態であり且つ前記第1待機開始時刻が前記第2待機開始時刻よりも前であると判定されると、又は、前記第2自律ロボットが前記待機状態でないと判定されると、前記第1自律ロボットの前記待機状態を解除することと、を更に含む、請求項1に記載の自律ロボットシステム。
【請求項3】
前記待機条件は、予備的待機条件であり、
前記処理回路は、前記タスク要求の発生中において、所定の主待機条件が成立すると、前記第1自律ロボットを前記タスクの実施を待機する待機状態にするように構成されている、請求項1又は2に記載の自律ロボットシステム。
【請求項4】
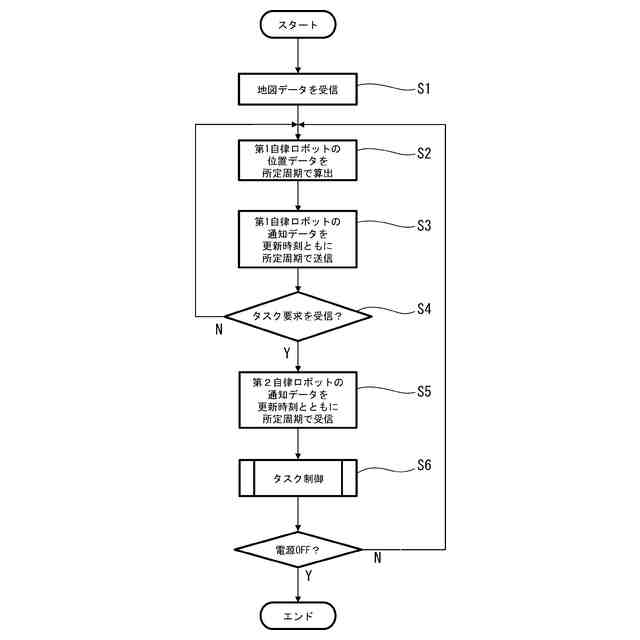
前記処理回路は、地図データを取得するように構成されており、
前記タスクは、前記第1自律ロボットの目的地である第1目的地への移動を含み、
前記タスク要求は、前記第1目的地への移動を要求する移動要求を含み、
前記タスクの実施を待機することは、前記第1目的地への移動を待機することを含む、請求項1又は2に記載の自律ロボットシステム。
【請求項5】
前記処理回路は、前記第2自律ロボットの位置を示す位置データ、及び、前記第2自律ロボットのステータスを示すステータスデータの少なくとも一方を取得するように構成され、
前記予備的待機条件は、
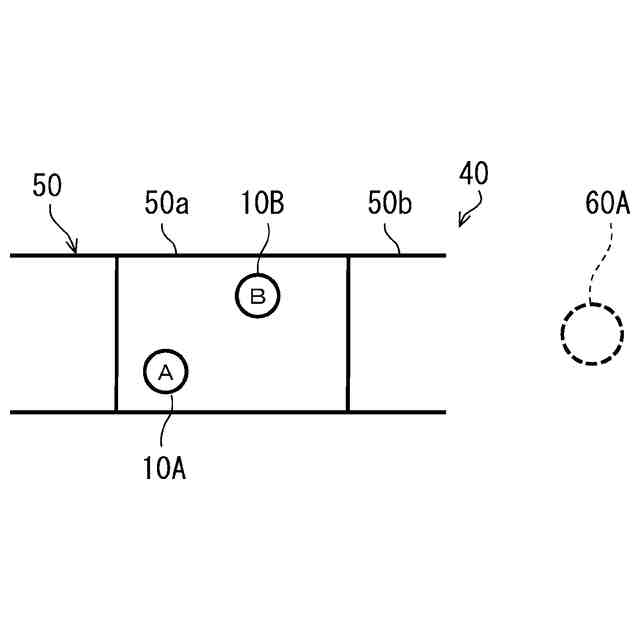
前記第1自律ロボットの前記位置データが示す前記位置と前記第2自律ロボットの前記位置データが示す前記位置とが所定の特定位置関係にあるとの条件、及び、
前記第2自律ロボットの前記ステータスデータが示す前記ステータスが所定の特定状態であるとの条件、の少なくとも一方を含む、請求項4に記載の自律ロボットシステム。
【請求項6】
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記特定状態は、停止状態又は待機状態を含み、
前記特定位置関係は、前記第1自律ロボットが存在する領域と同じ領域に前記第2自律ロボットが存在するとの関係を含み、
前記予備的待機条件は、前記第1自律ロボットが停止状態でタスク要求を受けた直後であるとの条件を更に含む、請求項5に記載の自律ロボットシステム。
【請求項7】
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記処理回路は、前記第2自律ロボットの目的地である第2目的地を取得するように構成され、
前記特定状態は、移動状態又は待機状態を含み、
前記特定位置関係は、前記第2自律ロボットの前記第2目的地への進行方向において前記第2自律ロボットが存在する第2領域の次の第1領域に前記第1自律ロボットが存在するとの関係を含む、請求項5に記載の自律ロボットシステム。
【請求項8】
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記特定状態は、停止状態又は待機状態を含み、
前記特定位置関係は、前記第1自律ロボットの前記第1目的地への進行方向において前記第1自律ロボットが存在する第1領域の次の第2領域に前記第2自律ロボットが存在するとの関係を含み、
前記予備的待機条件は、前記第1自律ロボットが、移動状態であり、前記第1領域と前記第2領域との間の境界から所定距離以内にいるとの条件を更に含む、請求項5に記載の自律ロボットシステム。
【請求項9】
前記地図データは、前記複数の自律ロボットが移動可能なエリアを複数の領域に区分けする領域データを含み、
前記処理回路は、前記第2自律ロボットの目的地である第2目的地を取得するように構成され、
前記特定状態は、移動状態又は待機状態を含み、
前記特定位置関係は、前記第1自律ロボットの前記第1目的地への進行方向において前記第1自律ロボットが存在する第1領域の次にある第2領域が、前記第2自律ロボットの前記第2目的地への進行方向において前記第2自律ロボットが存在する第3領域の次の領域と同一であるとの関係を含み、
前記予備的待機条件は、前記第1自律ロボットが前記第1領域と前記第2領域との間の境界から所定距離以内にいるとの条件を更に含む、請求項5に記載の自律ロボットシステム。
【請求項10】
第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施するシステムに用いられる自律ロボットの制御方法であって、
前記第2自律ロボットのステータスと前記ステータスが待機状態となった開始時刻である第2待機開始時刻とを示すデータを、前記データの更新時刻とともに周期的に取得することと、
前記タスク要求の発生中において所定の待機条件が成立すると、前記第1自律ロボットを前記タスクの実施を待機する待機状態にし、所定の判定処理を実施することと、を含み、
前記判定処理は、
前記データの前記更新時刻と、前記第1自律ロボットのステータスが待機状態となった開始時刻である第1待機開始時刻と、の間の時間的な前後関係を判定することと、
前記第1待機開始時刻と、前記第1待機開始時刻よりも後であると判定された前記更新時刻に対応する前記データの前記第2待機開始時刻と、の間の時間的な前後関係の判定結果、又は、前記第2自律ロボットが前記待機状態であるか否かの判定結果に基づいて、前記第1自律ロボットの前記待機状態の解除を決定することと、を含む、自律ロボットの制御方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律ロボットシステム、自律ロボットの制御方法及び制御プログラムに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
近年、複数の自律ロボットがそれぞれ自律的に移動する自律ロボットシステムが開発されている。前記システムでは、一の自律ロボットは、他の自律ロボットの情報を参照しながら自律的に移動する。
【0003】
なお、特許文献1には、通信状況に応じて車両の速度条件を設定する車両制御システムが開示されている。前記車両制御システムでは、自律走行車両は、有人車両と距離が基準距離以下である場合において、車間通信が確立されていると判断されると走行速度の上限を高くし、車間通信が確立されていないと判断されると走行速度の上限を低くする。
【先行技術文献】
【特許文献】
【0004】
特開2021-187345号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
前記自律ロボットシステムにおいて、前記一の自律ロボットが前記他の自律ロボットの情報を受信するための無線通信には、遅延が発生する可能性がある。通信遅延が生じると、自律ロボットの自律移動における判断に誤りが生じ得る。誤判断が生じると、前記複数の自律ロボットが意図せず同時移動して相互干渉すること、及び、前記複数の自律ロボットの何れかが長期にわたって移動を待機することなどが生じ得る。
【0006】
そこで本開示の一態様は、自律ロボット同士の相互干渉などを防止すべく、通信遅延による誤判断を無くすことを目的とする。
【課題を解決するための手段】
【0007】
本開示の一態様に係る自律ロボットシステムは、第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施する自律ロボットシステムであって、前記第1自律ロボットに対するタスク要求に基づいて前記第1自律ロボットを制御するように構成された処理回路を備える。前記処理回路は、前記第2自律ロボットのステータスと前記ステータスが待機状態となった開始時刻である第2待機開始時刻とを示すデータを、前記データの更新時刻とともに周期的に取得することと、前記タスク要求の発生中において所定の待機条件が成立すると、前記第1自律ロボットを前記タスクの実施を待機する待機状態にし、所定の判定処理を実施することと、を行うように構成されている。前記判定処理は、前記データの前記更新時刻と、前記第1自律ロボットのステータスが待機状態となった開始時刻である第1待機開始時刻と、の間の時間的な前後関係を判定することと、前記第1待機開始時刻と、前記第1待機開始時刻よりも後であると判定された前記更新時刻に対応する前記データの前記第2待機開始時刻と、の間の時間的な前後関係の判定結果、又は、前記第2自律ロボットが前記待機状態であるか否かの判定結果に基づいて、前記第1自律ロボットの前記待機状態の解除を決定することと、を含む。
【0008】
本開示の一態様に係る自律ロボットの制御方法は、第1自律ロボット及び第2自律ロボットを含む複数の自律ロボットがそれぞれタスクを実施するシステムに用いられる自律ロボットの制御方法であって、前記第2自律ロボットのステータスと前記ステータスが待機状態となった開始時刻である第2待機開始時刻とを示すデータを、前記データの更新時刻とともに周期的に取得することと、前記タスク要求の発生中において所定の待機条件が成立すると、前記第1自律ロボットを前記タスクの実施を待機する待機状態にし、所定の判定処理を実施することと、を含む。前記判定処理は、前記データの前記更新時刻と、前記第1自律ロボットのステータスが待機状態となった開始時刻である第1待機開始時刻と、の間の時間的な前後関係を判定することと、前記第1待機開始時刻と、前記第1待機開始時刻よりも後であると判定された前記更新時刻に対応する前記データの前記第2待機開始時刻と、の間の時間的な前後関係の判定結果、又は、前記第2自律ロボットが前記待機状態であるか否かの判定結果に基づいて、前記第1自律ロボットの前記待機状態の解除を決定することと、を含む。
【0009】
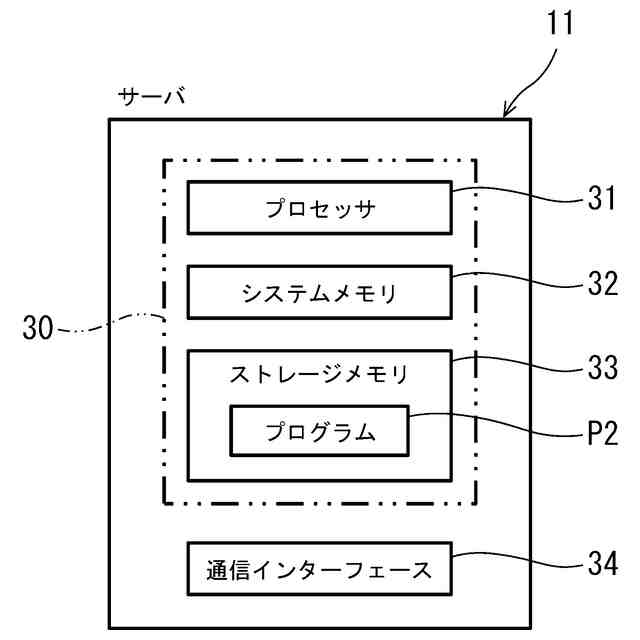
本開示の一態様に係る自律ロボットの制御プログラムは、前記方法を少なくとも1つのプロセッサに実行させる。前記プログラムは、コンピュータ読み取り可能な記憶媒体に記憶され得る。前記記憶媒体は、非一時的(non-transitory)で有形(tangible)な媒体である。前記記憶媒体は、コンピュータ(例えば、携帯情報端末、パーソナルコンピュータ、サーバ等)に内蔵又は外付けされ得る。前記記憶媒体は、RAM、ROM、EEPROM、ストレージ等を含み、例えば、ハードディスク、フラッシュメモリ、光ディスク等とし得る。前記記憶媒体に記憶されたプログラムは、前記記憶媒体が直接接続されるコンピュータにおいて実行されてもよいし、前記記憶媒体とネットワーク(例えば、インターネット)を介して接続されたコンピュータにおいて実行されてもよい。
【発明の効果】
【0010】
本開示の一態様によれば、待機条件の成立時に、第2自律ロボットのデータの更新時刻と、第1自律ロボットの第1待機開始時刻と、第2自律ロボットの第2待機開始時刻と、を確認して(又は、第2自律ロボットが待機状態であるか否かを確認して)、待機条件に基づいた第1自律ロボットの待機状態の解除を決定する。よって、通信遅延による誤判断が防止され、自律ロボット同士の相互干渉を防止できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
18日前
ローム株式会社
半導体集積回路
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
7日前
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
4日前
株式会社ダイフク
搬送設備
2か月前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社オプトン
制御プログラム生成装置
1か月前
トヨタ自動車株式会社
減圧弁
1日前
三菱電機株式会社
自己位置推定装置
2か月前
株式会社鷺宮製作所
制御装置
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
27日前
マーク ヘイリー
消防ロボット
11日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社テイエルブイ
減圧弁の制御装置
13日前
アズビル株式会社
制御システムおよび制御方法
7日前
アズビル株式会社
制御システムおよび制御方法
7日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
株式会社計数技研
移動体、及びプログラム
2か月前
三菱電機株式会社
電源回路
27日前
WHILL株式会社
電動モビリティ
2か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
オムロン株式会社
安全装置
1か月前
ミツミ電機株式会社
電源回路および駆動回路
7日前
株式会社ダイヘン
搬送車
2か月前
株式会社ダイフク
飛行体制御システム
29日前
ローム株式会社
半導体装置
2か月前
個人
ペダル装置、及びペダル装置を具備する自動車
22日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ