TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025106141
公報種別
公開特許公報(A)
公開日
2025-07-14
出願番号
2024000006
出願日
2024-01-02
発明の名称
ペダル装置、及びペダル装置を具備する自動車
出願人
個人
代理人
個人
主分類
G05G
1/30 20080401AFI20250707BHJP(制御;調整)
要約
【課題】踏み間違えや過剰な力による踏み込みによる事故を安価に防止できるペダル装置を提供する。
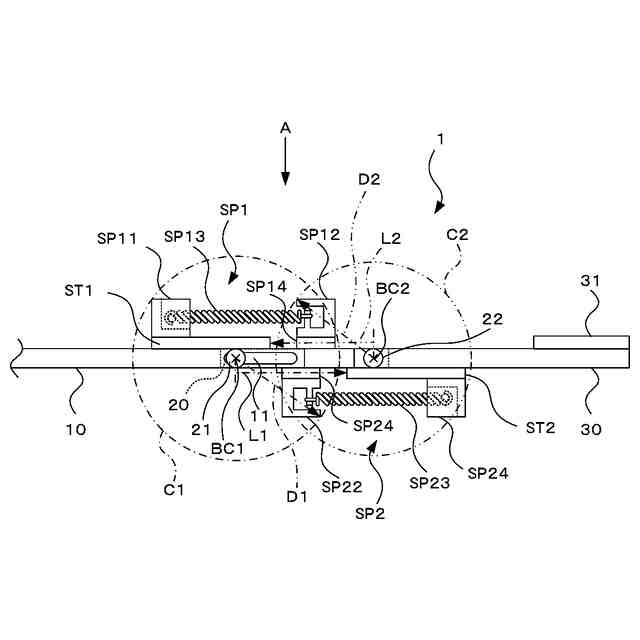
【解決手段】ペダル装置1は、一端が動力出力調整装置に連結する第1リンク10と、一端が第1リンク10に対して回動可能に、かつ第1リンク10に対する接続部分の位置が第1リンク10の延伸方向に沿って変位可能に連結される第2リンク20と、一端が第2リンク20に対して回動可能に連結される第3リンク30と、第2リンク20を踏み込み方向とは逆方向に付勢する第1弾性部SP1と、付勢される第2リンク20が初期状態を超えて第1弾性部SP1の付勢方向に回動することを規制する第1ストッパST1と、第3リンク30を踏み込み方向に付勢する第2弾性部SP2と、付勢される第3リンク30が初期状態を超えて第2弾性部SP2の付勢方向に回動することを規制する第2ストッパST2と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
一端が動力出力調整装置に連結する第1リンクと、
一端が前記第1リンクに対して回動可能に、かつ前記第1リンクに対する接続部分の位置が前記第1リンクの延伸方向に沿って変位可能に連結される第2リンクと、
一端が前記第2リンクに対して回動可能に連結される第3リンクと、
前記第2リンクを踏み込み方向とは逆方向に付勢する第1弾性部と、
付勢される前記第2リンクが初期状態を超えて前記第1弾性部の付勢方向に回動することを規制する第1ストッパと、
前記第3リンクを踏み込み方向に付勢する第2弾性部と、
付勢される前記第3リンクが初期状態を超えて前記第2弾性部の付勢方向に回動することを規制する第2ストッパと、
を備えるペダル装置。
続きを表示(約 38 文字)
【請求項2】
請求項1に記載のペダル装置を具備する自動車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ペダル装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
昨今、自動車の運転者は高齢者が多くなり、特にアクセルペダルとブレーキペダルとを踏み間違えることにより、重大な事故が起きている。このため、アクセルペダルとブレーキペダルとの踏み間違えによる事故を防止するために様々な技術が提案されている(例えば、特許文献1。)
【0003】
しかしながら、これらの技術は構造が複雑であったり、エンジンやモータの出力などを電子制御する自動車にしか適用できないものであったりするため、そのコストや導入対象につき種々の困難があり、広く実用化されるに至っていない。
【先行技術文献】
【特許文献】
【0004】
特許第6592642号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、踏み間違えや過剰な力による踏み込みによる事故を安価に防止できるペダル装置を提供することである。
【0006】
なお、上記の「背景技術」、および「発明が解決しようとする課題」に記載した内容は、本発明をするに至った契機(きっかけ)を示すものであり、本発明の技術的範囲を限定するものではなく、また、本発明の技術的範囲の限定解釈を許容するものでもない(平成17年(行ケ)第10042号、及び出願日における特許庁審査基準第II部第2章 第2節3.2.1参照。)。
【課題を解決するための手段】
【0007】
本発明は、一端が動力出力調整装置に連結する第1リンクと、一端が前記第1リンクに対して回動可能に、かつ前記第1リンクに対する接続部分の位置が前記第1リンクの延伸方向に沿って変位可能に連結される第2リンクと、一端が前記第2リンクに対して回動可能に連結される第3リンクと、前記第2リンクを踏み込み方向とは逆方向に付勢する第1弾性部と、付勢される前記第2リンクが初期状態を超えて前記第1弾性部の付勢方向に回動することを規制する第1ストッパと、前記第3リンクを踏み込み方向に付勢する第2弾性部と、付勢される前記第3リンクが初期状態を超えて前記第2弾性部の付勢方向に回動することを規制する第2ストッパと、を備えるペダル装置を提供する。
【発明の効果】
【0008】
本発明によれば、踏み間違えや過剰な力による踏み込みによる事故を安価に防止できるペダル装置を提供することができる。
【図面の簡単な説明】
【0009】
ペダル装置の側面図である。
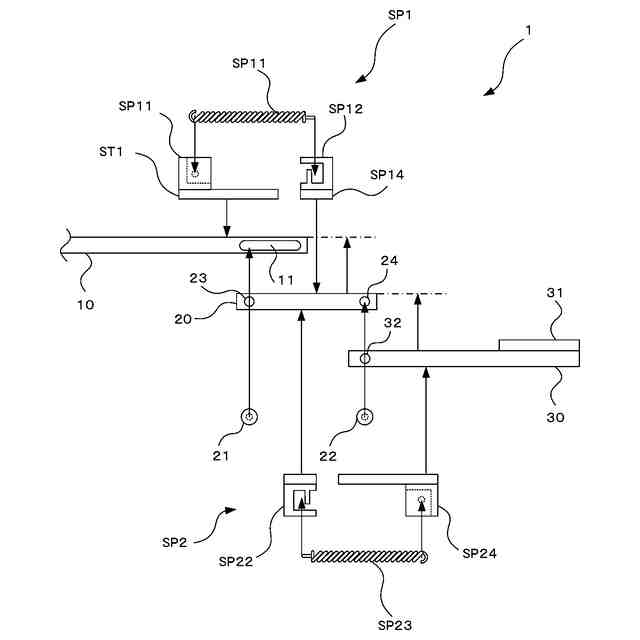
ペダル装置の分解側面図である。
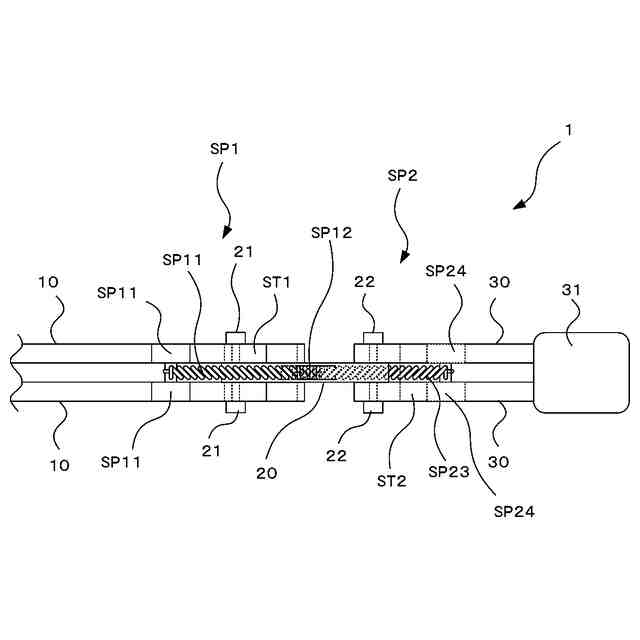
ペダル装置の平面図である。
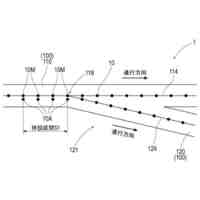
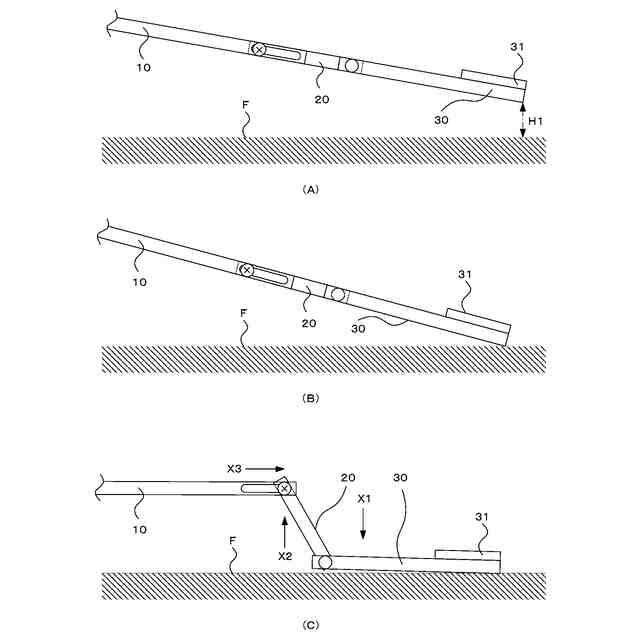
ペダル装置の動作を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の一実施形態に係るペダル装置1を、図面を参照しながら詳細に説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
23日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
9日前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
ローム株式会社
基準電圧源
6日前
愛知製鋼株式会社
車両用システム
17日前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
3か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
株式会社ダイフク
搬送設備
13日前
トヨタ自動車株式会社
ペダル機構
3か月前
トヨタ自動車株式会社
移動制御システム
1か月前
株式会社オプトン
制御プログラム生成装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
2か月前
株式会社鷺宮製作所
制御装置
2か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイフク
物品搬送設備
3か月前
株式会社ダイヘン
負荷時タップ切換器
2か月前
キヤノン株式会社
配送システム
9日前
マーク ヘイリー
消防ロボット
1か月前
株式会社ダイフク
物品搬送設備
2か月前
トヨタ自動車株式会社
クラッチペダル
20日前
株式会社ダイフク
物品搬送設備
2か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
アズビル株式会社
制御システムおよび制御方法
1か月前
ルネサスエレクトロニクス株式会社
半導体装置
23日前
愛知製鋼株式会社
マーカシステム及び制御方法
18日前
株式会社テイエルブイ
減圧弁の制御装置
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ