TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025094524
公報種別
公開特許公報(A)
公開日
2025-06-25
出願番号
2023210127
出願日
2023-12-13
発明の名称
制御装置
出願人
株式会社鷺宮製作所
代理人
個人
,
個人
,
個人
主分類
G05B
13/02 20060101AFI20250618BHJP(制御;調整)
要約
【課題】複数種類の物理量により制御対象をフィードバック制御する。
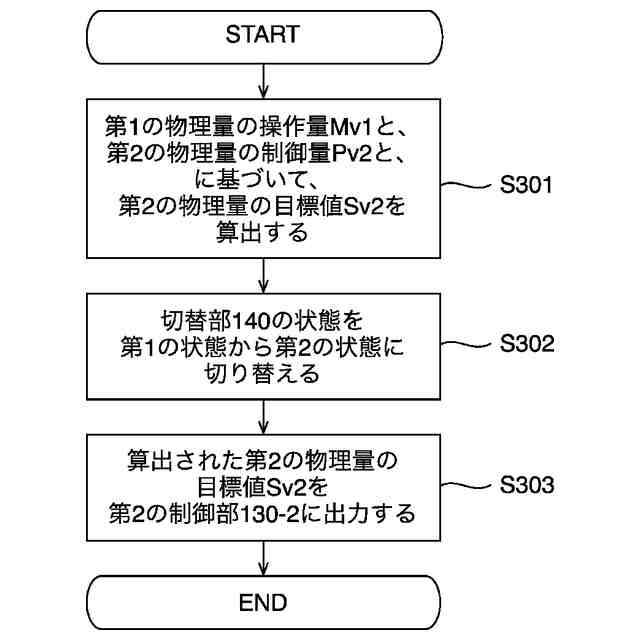
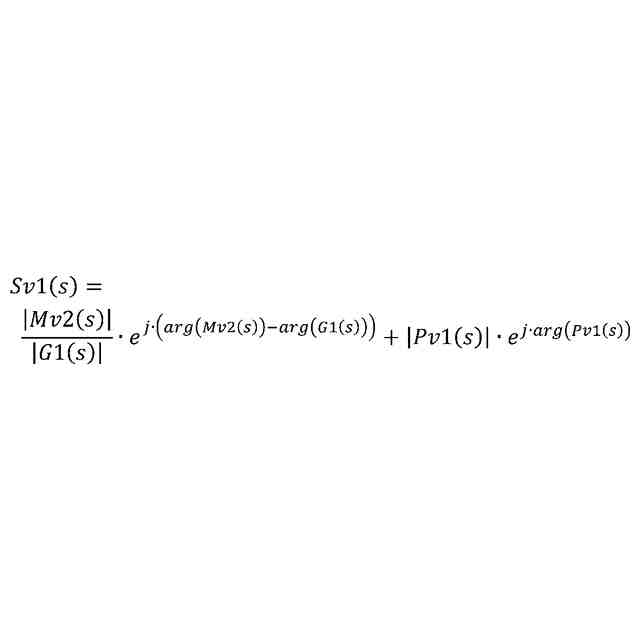
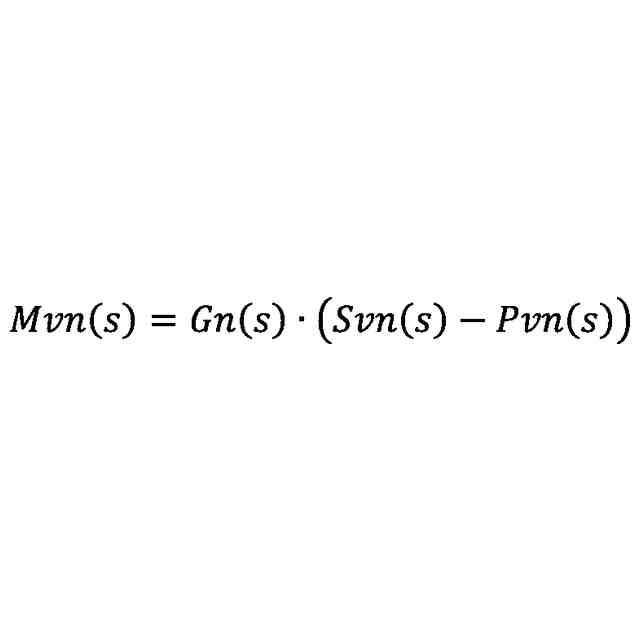
【解決手段】フィードバック制御に用いる物理量を切り替える際に、当該切り替え後の逆伝達関数を用いて、当該切り替え後の物理量の目標値を算出する。
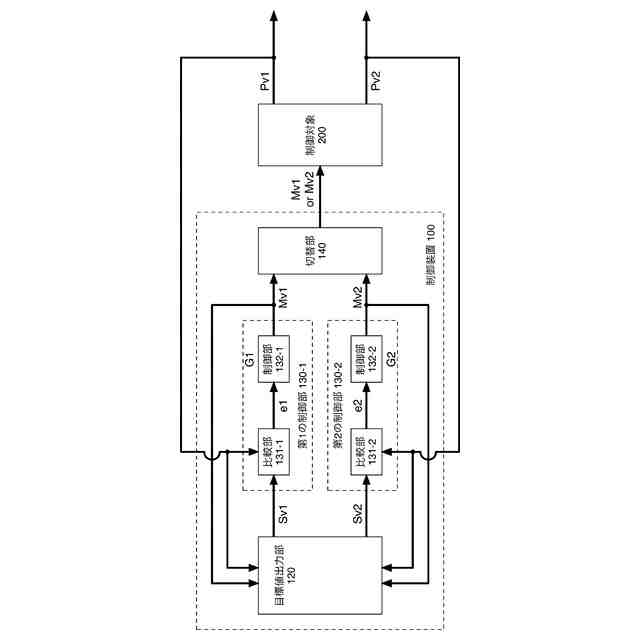
【選択図】図3
特許請求の範囲
【請求項1】
複数種類の物理量により制御対象をフィードバック制御するために、コンピュータにより実行される情報処理方法であって、
前記フィードバック制御に用いる物理量を切り替える際に、当該切り替え後の逆伝達関数を用いて、当該切り替え後の物理量の目標値を算出する、情報処理方法。
続きを表示(約 1,200 文字)
【請求項2】
前記フィードバック制御に用いる物理量を第1の物理量から第2の物理量に切り替える際に、前記第1の物理量の目標値と制御量の差分に応じた操作量と、前記第2の物理量の制御量と、に基づいて、前記第2の物理量の目標値を算出する、請求項1に記載の情報処理方法。
【請求項3】
前記フィードバック制御に用いる物理量を前記第2の物理量から前記第1の物理量に切り替える際に、前記第2の物理量の目標値と制御量の差分に応じた操作量と、前記第1の物理量の制御量と、に基づいて、前記第1の物理量の目標値を算出する、請求項2に記載の情報処理方法。
【請求項4】
複数種類の物理量により制御対象をフィードバック制御するために、当該複数種類の物理量の目標値を算出する情報処理装置であって、
前記フィードバック制御に用いる物理量を切り替える際に、当該切り替え後の逆伝達関数を用いて、当該切り替え後の物理量の目標値を算出する、情報処理装置。
【請求項5】
前記フィードバック制御に用いる物理量を第1の物理量から第2の物理量に切り替える際に、前記第1の物理量の目標値と制御量の差分に応じた操作量と、前記第2の物理量の制御量と、に基づいて、前記第2の物理量の目標値を算出する、請求項4に記載の情報処理装置。
【請求項6】
前記フィードバック制御に用いる物理量を前記第2の物理量から前記第1の物理量に切り替える際に、前記第2の物理量の目標値と制御量の差分に応じた操作量と、前記第1の物理量の制御量と、に基づいて、前記第1の物理量の目標値を算出する、請求項5に記載の情報処理装置。
【請求項7】
前記制御対象をフィードバック制御する制御装置であって、
請求項5または6に記載の情報処理装置と、
第1の制御部と、
第2の制御部と、
切替部と、を有し、
前記情報処理装置は、第1の物理量の目標値と、第2の物理量の目標値と、を出力し、
前記第1の制御部は、前記第1の物理量の目標値および制御量の入力を受け、当該入力された第1の物理量の目標値および制御量の差分に応じた操作量を出力し、
前記第2の制御部は、前記第2の物理量の目標値および制御量の入力を受け、当該入力された第2の物理量の目標値および制御量の差分に応じた操作量を出力する第2の制御部と、
前記切替部は、
前記第1の制御部から出力された操作量を前記制御対象に入力する第1の状態と、前記第2の制御部から出力された操作量を前記制御対象に入力する第2の状態と、の間で切り替わり、
前記フィードバック制御に用いる物理量が前記第1の物理量であるならば、前記第1の状態であり、
前記フィードバック制御に用いる物理量が前記第2の物理量であるならば、前記第2の状態である、制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
複数種類の物理量により制御対象をフィードバック制御することが可能な制御装置がある。例えば、特許文献1は、複数種類の物理量の各々に対応する複数の系統の制御手段を有することで、複数種類の物理量により制御対象をフィードバック制御することを可能にした制御装置を開示している。
【先行技術文献】
【非特許文献】
【0003】
特許第5841795号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
フィードバック制御に用いる物理量を切り替える際に、制御対象に入力される操作量に不連続な変化が生じることがある。この操作量に不連続な変化は、制御対象にショック(衝撃)が与えられることがある。そこで、特許文献1に開示された制御装置では、操作量を逐次記憶しておき、フィードバック制御に用いる物理量の切り替え時に、記憶された操作量のうちの直前に記憶された操作量を制御対象に出力することで、制御手段の系統を切り替える際の操作量の不連続な変化を防いでいる。しかしながら、特許文献1に開示された制御装置では、制御対象の停止中の切り替えを対象としており、制御対象の稼働中の切り替えを対象としていない。
【0005】
本発明は、複数種類の物理量により制御対象をフィードバック制御することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一実施形態に係る情報処理方法は、複数種類の物理量により制御対象をフィードバック制御するために、コンピュータにより実行される情報処理方法であって、前記フィードバック制御に用いる物理量を切り替える際に、当該切り替え後の逆伝達関数を用いて、当該切り替え後の物理量の目標値を算出する。
【0007】
前記フィードバック制御に用いる物理量を第1の物理量から第2の物理量に切り替える際に、前記第1の物理量の目標値と制御量の差分に応じた操作量と、前記第2の物理量の制御量と、に基づいて、前記第2の物理量の目標値を算出するようにしても良い。
【0008】
前記フィードバック制御に用いる物理量を前記第2の物理量から前記第1の物理量に切り替える際に、前記第2の物理量の目標値と制御量の差分に応じた操作量と、前記第1の物理量の制御量と、に基づいて、前記第1の物理量の目標値を算出するようにしても良い。
【0009】
本発明の一実施形態に係る情報処理装置は、複数種類の物理量により制御対象をフィードバック制御するために、当該複数種類の物理量の目標値を算出する情報処理装置であって、前記フィードバック制御に用いる物理量を切り替える際に、当該切り替え後の逆伝達関数を用いて、当該切り替え後の物理量の目標値を算出する。
【0010】
前記フィードバック制御に用いる物理量を第1の物理量から第2の物理量に切り替える際に、前記第1の物理量の目標値と制御量の差分に応じた操作量と、前記第2の物理量の制御量と、に基づいて、前記第2の物理量の目標値を算出するようにしても良い。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社鷺宮製作所
遮断弁
12日前
株式会社鷺宮製作所
圧力センサ
22日前
株式会社鷺宮製作所
振動発電装置
1か月前
株式会社鷺宮製作所
パイロット式圧力調整弁
27日前
株式会社鷺宮製作所
弁装置および弁装置ユニット
7日前
株式会社鷺宮製作所
弁装置および冷凍サイクルシステム
7日前
株式会社鷺宮製作所
弁装置、接続構造、および接続方法
1か月前
株式会社鷺宮製作所
シミュレータおよびディスプレイ架台
1か月前
株式会社鷺宮製作所
ステータコイルユニット及び流量調整弁
20日前
株式会社鷺宮製作所
弁装置、逆止弁、及び冷凍サイクルシステム
1か月前
株式会社鷺宮製作所
音検出装置および音検出装置を備える音検出システム
29日前
株式会社鷺宮製作所
制御装置、制御方法、過熱度コントローラ、および制御プログラム
1か月前
個人
生産早送り装置
2か月前
株式会社豊田自動織機
産業車両
2か月前
株式会社カネカ
製造システム
2か月前
オムロン株式会社
スレーブ装置
1か月前
ローム株式会社
基準電圧源
1か月前
愛知製鋼株式会社
車両用システム
2か月前
株式会社FUJI
加工機械ライン
3か月前
株式会社熊谷組
障害物の検出方法
28日前
新電元工業株式会社
作業用ロボット
26日前
株式会社クボタ
作業車
6日前
個人
作業車両自動化システム
3か月前
豊田合成株式会社
機器制御装置
1か月前
愛知製鋼株式会社
目標軌跡の設定方法
3か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
2か月前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
3か月前
トヨタ自動車株式会社
減圧弁
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
3か月前
トヨタ自動車株式会社
制御装置
1か月前
マーク ヘイリー
消防ロボット
3か月前
カヤバ株式会社
減圧弁
1か月前
株式会社ダイフク
物品搬送設備
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ