TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141284
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024041153
出願日
2024-03-15
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
,
個人
主分類
G05D
1/622 20240101AFI20250919BHJP(制御;調整)
要約
【課題】AIモデル同士のコンフリクトを解消する。
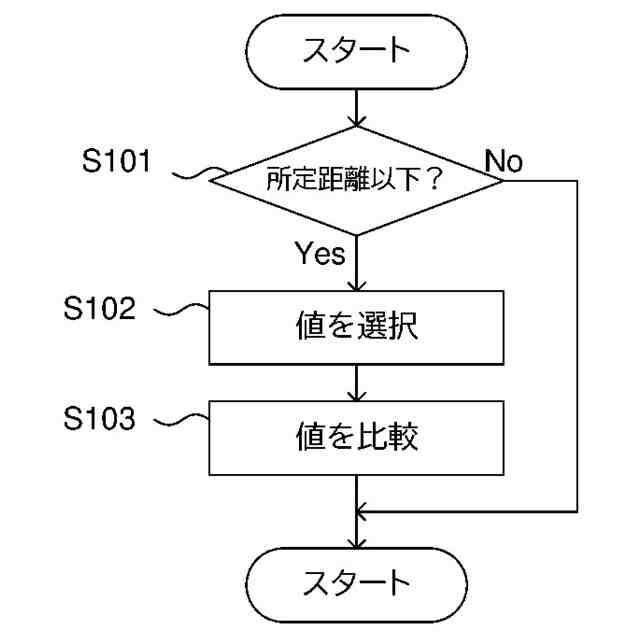
【解決手段】制御装置は、AIモデルを用いて一の移動体を自律移動させる制御装置である。当該制御装置は、自律移動している一の移動体と、AIモデルを用いて自律移動している他の移動体との間の距離が所定距離以下である場合に、予め定められた複数の値のうち一の値を選択する選択手段と、該選択された一の値と、他の移動体が複数の値から選択した値とを比較する比較手段と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
AIモデルを用いて一の移動体を自律移動させる制御装置であって、
自律移動している前記一の移動体と、AIモデルを用いて自律移動している他の移動体との間の距離が所定距離以下である場合に、予め定められた複数の値のうち一の値を選択する選択手段と、
前記選択された一の値と、前記他の移動体が前記複数の値から選択した値とを比較する比較手段と、
を備えることを特徴とする制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置の技術分野に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
この種の装置に関連する技術として、例えば、AI(Artificial Intelligence)モデルを用いてサービスを提供する技術が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/084810号
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数のAIモデルが存在する場合、例えば、一のAIモデルと他のAIモデルとの間にコンフリクトが生じる可能性がある。例えば、コンフリクトが生じる場合に、一のAIモデル及び他のAIモデルのいずれを適用するかを定めたルールが事前に決まっていれば、該ルールに従えばよい。他方で、上記ルールに相当するものが定められていない場合、AIモデルを用いる機能が適切に発揮されない可能性があるという技術的問題点がある。
【0005】
本発明は、上記問題点に鑑みてなされたものであり、AIモデル同士のコンフリクトを解消することができる制御装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る制御装置は、AIモデルを用いて一の移動体を自律移動させる制御装置であって、自律移動している前記一の移動体と、AIモデルを用いて自律移動している他の移動体との間の距離が所定距離以下である場合に、予め定められた複数の値のうち一の値を選択する選択手段と、前記選択された一の値と、前記他の移動体が前記複数の値から選択した値とを比較する比較手段と、を備えるというものである。
【図面の簡単な説明】
【0007】
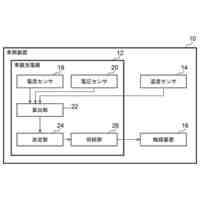
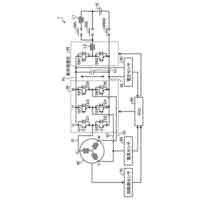
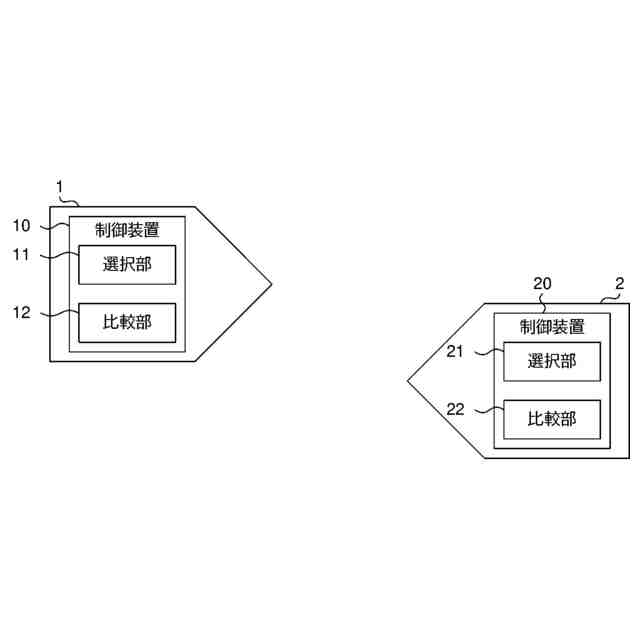
実施形態に係る制御装置の構成の一例を示すブロック図である。
実施形態に係る制御装置の動作の一例を示すフローチャートである。
【発明を実施するための形態】
【0008】
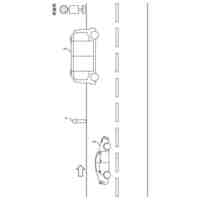
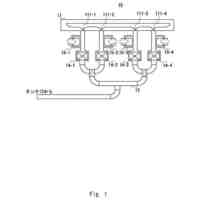
制御装置の実施形態について図1及び図2を参照して説明する。図1において、制御装置10は、移動体1に搭載されている。制御装置20は、移動体2に搭載されている。制御装置10は、AIモデルを用いて、移動体1を自律移動させてよい。制御装置20は、AIモデルを用いて、移動体2を自律移動させてよい。尚、移動体1及び2は、例えば、自動運転車両、AGV(Automatic Guided Vehicle)、ロボット等であってよい。尚、移動体1及び2には、例えばカメラ、レーダ等の各種センサが搭載されていてよい。
【0009】
移動体1の自律移動の一例について説明する。例えば、移動体1の進路前方に障害物が存在する場合、移動体1は、障害物との衝突を回避するように移動してよい。尚、障害物は、その位置が変化しない物であってもよいし、移動体(例えば、人、車両、ロボット等)であってもよい。この場合、制御装置10は、AIモデルを用いて、移動体1が障害物との衝突を回避可能な移動体1の走行経路を設定してよい。障害物が移動体である場合、制御装置10は、障害物としての移動体が所定時間後に存在する可能性のある範囲を考慮して、移動体1の走行経路を設定してよい。制御装置10は、設定された走行経路に沿って移動体1が移動するように、移動体1を制御してよい。尚、移動体1と障害物との衝突を回避することが難しい場合、移動体1は停止してよい。尚、移動体2も、移動体1と同様に自律移動してよい。このため、移動体2の自律移動の一例についての説明を省略する。
【0010】
例えば、図1に示すように、移動体1と移動体2とが対向して近づく場合、移動体1及び2が移動していることに起因して、移動体1と移動体2との衝突を回避可能な走行経路が設定できないことがある。この結果、移動体1及び2は停止してよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
方法
29日前
トヨタ自動車株式会社
電池
15日前
トヨタ自動車株式会社
車体
29日前
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
車両
16日前
トヨタ自動車株式会社
配管
16日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
モータ
28日前
トヨタ自動車株式会社
電動車
15日前
トヨタ自動車株式会社
蓄電池
29日前
トヨタ自動車株式会社
ロータ
16日前
トヨタ自動車株式会社
タンク
今日
トヨタ自動車株式会社
電動車
16日前
トヨタ自動車株式会社
蓄電装置
28日前
トヨタ自動車株式会社
制御装置
28日前
トヨタ自動車株式会社
コネクタ
15日前
トヨタ自動車株式会社
路側装置
28日前
トヨタ自動車株式会社
塗工装置
7日前
トヨタ自動車株式会社
車両装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
エンジン
15日前
トヨタ自動車株式会社
電動車両
28日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
制御装置
16日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電セル
23日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
蓄電装置
7日前
トヨタ自動車株式会社
路側装置
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ