TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025122872
公報種別
公開特許公報(A)
公開日
2025-08-22
出願番号
2024018580
出願日
2024-02-09
発明の名称
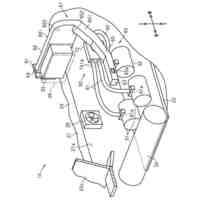
産業車両
出願人
株式会社豊田自動織機
代理人
主分類
G05D
1/225 20240101AFI20250815BHJP(制御;調整)
要約
【課題】作業者が不在の荷役位置であっても、必要なときにスリープ状態を自動的に解除して自動走行を開始することが可能な産業車両の提供にある。
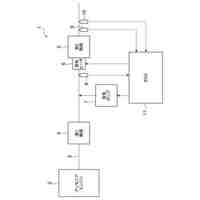
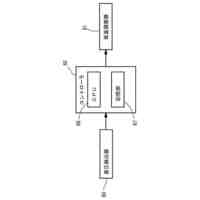
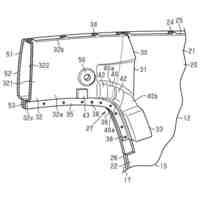
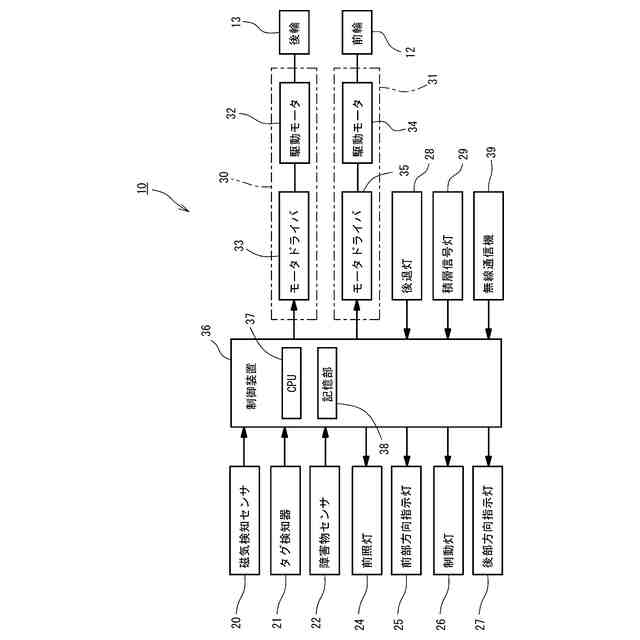
【解決手段】車体と、車体に搭載された走行駆動源と、走行駆動源を制御する車載コントローラ36と、を有し、産業車両の運行制御を行う運行制御装置に予め設定された運行データに基づいて自動走行する産業車両において、車載コントローラ36は、車体が運行データに予め設定された荷役位置に到着したとき、運行制御装置の指令により停止するとともに、自動走行可能な通常状態から車体の各部の電力消費が抑制される省電力スリープ状態とし、省電力スリープ状態後に予め設定したスリープ解除条件を満たしたとき、省電力スリープ状態を解除して通常状態とし、自動走行を再開する。
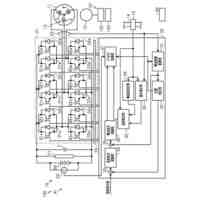
【選択図】 図3
特許請求の範囲
【請求項1】
車体と、
前記車体に搭載された走行駆動源と、
前記走行駆動源を制御する車載コントローラと、を有し、
産業車両の運行制御を行う運行制御装置に予め設定された運行データに基づいて自動走行する産業車両において、
前記車載コントローラは、前記車体が前記運行データに予め設定された荷役位置に到着したとき、前記運行制御装置の指令により停止するとともに、自動走行可能な通常状態から前記車体の各部の電力消費が抑制される省電力スリープ状態とし、前記省電力スリープ状態後に予め設定したスリープ解除条件を満たしたとき、前記省電力スリープ状態を解除して通常状態とし、自動走行を再開することを特徴とする産業車両。
続きを表示(約 600 文字)
【請求項2】
前記スリープ解除条件は、前記運行制御装置からのスリープ解除指令を受けることであり、
前記車載コントローラは、前記スリープ解除指令を受けたとき、前記省電力スリープ状態を解除して通常状態として自動走行を再開することを特徴とする請求項1記載の産業車両。
【請求項3】
前記スリープ解除条件は、予め設定された前記省電力スリープ状態が維持されるスリープ設定時間であり、
前記車載コントローラは、前記省電力スリープ状態の開始から前記スリープ設定時間が経過したとき、前記省電力スリープ状態を解除して通常状態として自動走行を再開することを特徴とする請求項1記載の産業車両。
【請求項4】
前記車載コントローラは、前記運行制御装置からのスリープ指令を受けて前記産業車両を前記省電力スリープ状態とすることを特徴とする請求項1又は2記載の産業車両。
【請求項5】
前記運行制御装置からのスリープ指令は、前記荷役位置に到着したときに前記運行制御装置が取得する前記荷役位置の位置情報に基づくことを特徴とする請求項1又は2記載の産業車両。
【請求項6】
前記車体は、通電遮断するスリープ対象となる複数の機器を有し、
前記スリープ対象となる機器は、前記運行制御装置により設定されることを特徴とする請求項1又は2記載の産業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、自動走行可能な産業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
近年、物流現場では、牽引車等の自動走行化が進んでいる(例えば、特許文献1を参照)。この種の産業車両としての牽引車は、例えば、空の台車を牽引して荷の積み込み位置にて停止する。荷の積み込み位置には作業者が存在しており、作業車は荷を台車へ積み込む。荷の積み込みが終了すると無人走行を再開する。この場合、作業者が停止中の牽引車のキーを操作することにより、キーONの状態からキーOFFの状態へ切り換え、操作したキーを所持することで、他の作業者が牽引車の操作をできないようにする。なお、キーOFFの状態は、完全に電源がOFFになるのではなく省電力となるスリープ状態である。そして、荷の積み込みが完了すると所持していたキーで牽引車をキーONの状態とし、自動走行の再開が可能な通常状態となる。
【0003】
産業車両に関係する別の従来技術として、例えば、特許文献2に開示された無人車システムが知られている。特許文献2に開示された無人車システムでは、各無人車は誘導線をセンサにて検出しながら誘導線に沿って走行する。また、各無人車は誘導線上の所々に配置されたマークプレートをマークセンサにより検知することにより、経路上の自車の位置や分岐箇所等を知るための情報を得る。無人車の走行域の外側には地上制御盤が設置されている。地上制御盤は各無人車と双方向の無線通信を行えるようになっており、各無人車は地上制御盤から送信された指示データに基づいて運行制御される。
【0004】
この種の無人車システムでは、何らかのトラブルが発生したために全無人車に停止させるときの「非常停止」、1日の作業を終了して電源を落とすときの「スリープ」、スリープを解除して無人車を起動させるときの「スタート」の3つの運行内容が存在する。「非常停止」ではCPUも電源が切られる。「スリープ」ではCPUの電源は切られない。このため、「スタート」により運転を起動すると「スリープ」で中断した続きから作業が開始される。
【先行技術文献】
【特許文献】
【0005】
特開2023-117433号公報
特開平11-15529号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に示されるような牽引車では、積み込み位置に作業者が存在せず、例えば、積み込みロボット等の荷役装置が設置されている自動化荷役ラインであれば、停止中の牽引車をスリープ状態とすることができない。また、特許文献2に開示された無人車システムでは、地上制御盤が、スリープボタン、スタートボタンが押下された信号を入力したとき全車指令であるとみなし、全無人車に指示データを送信するに過ぎない。
【0007】
本発明は上記の問題点に鑑みてなされたもので、本発明の目的は、作業者が不在の荷役位置であっても、必要なときにスリープ状態を自動的に解除して自動走行を開始することが可能な産業車両の提供にある。
【課題を解決するための手段】
【0008】
上記の課題を解決するために、本発明は、車体と、前記車体に搭載された走行駆動源と、前記走行駆動源を制御する車載コントローラと、を有し、産業車両の運行制御を行う運行制御装置に予め設定された運行データに基づいて自動走行する産業車両において、前記車載コントローラは、前記車体が前記運行データに予め設定された荷役位置に到着したとき、前記運行制御装置の指令により停止するとともに、自動走行可能な通常状態から前記車体の各部の電力消費が抑制される省電力スリープ状態とし、前記省電力スリープ状態後に予め設定したスリープ解除条件を満たしたとき、前記省電力スリープ状態を解除して通常状態とし、自動走行を再開することを特徴とする。
【0009】
本発明では、車載コントローラは、産業車両が荷役位置に到着すると運行制御装置の指令により停止するとともに、自動走行可能な通常状態から車体の各部の電力消費が抑制される省電力スリープ状態とする。車載コントローラは、省電力スリープ状態後に予め設定したスリープ解除条件を満たしたとき、省電力スリープ状態を解除して通常状態とし、自動走行を再開する。したがって、作業者が不在の荷役位置であっても、必要なときにスリープ状態を自動的に解除して自動走行を開始することが可能である。その結果、荷役位置での停止中に無駄な電力の消費を抑制できる。
【0010】
また、上記の産業車両において、前記スリープ解除条件は、前記運行制御装置からのスリープ解除指令を受けることであり、前記車載コントローラは、前記スリープ解除指令を受けたとき、前記省電力スリープ状態を解除して通常状態として自動走行を再開する構成としてもよい。
この場合、車載コントローラは、運行制御装置からスリープ解除指令を受けることで、省電力スリープ状態を自動的に解除して通常状態とすることができる。また、産業車両が通常状態とすることで自動走行を再開することが可能となる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社豊田自動織機
産業車両
23日前
株式会社豊田自動織機
荷役装置
3日前
株式会社豊田自動織機
操作装置
11日前
株式会社豊田自動織機
トランス
11日前
株式会社豊田自動織機
電力変換器
23日前
株式会社豊田自動織機
車両制御装置
9日前
株式会社豊田自動織機
電力変換装置
23日前
株式会社豊田自動織機
双方向充電器
16日前
株式会社豊田自動織機
排気浄化装置
12日前
株式会社豊田自動織機
電磁ブレーキ装置
23日前
株式会社豊田自動織機
燃料電池ユニット
9日前
株式会社豊田自動織機
ターボチャージャ
3日前
株式会社豊田自動織機
エンジン式産業車両
24日前
株式会社豊田自動織機
スクロール型圧縮機
24日前
株式会社豊田自動織機
スクロール型圧縮機
25日前
株式会社豊田自動織機
織機用異常検知装置
3日前
株式会社豊田自動織機
スクロール型圧縮機
23日前
株式会社豊田自動織機
ねじりコイルばね装置
19日前
株式会社豊田自動織機
スクロール型電動圧縮機
23日前
株式会社豊田自動織機
インバータ一体型電動機
23日前
株式会社豊田自動織機
繊維機械の検査システム
3日前
株式会社豊田自動織機
内燃機関の制御システム
19日前
株式会社豊田自動織機
車両のルーフサイド構造
12日前
株式会社豊田自動織機
ローリングピストン型圧縮機
24日前
株式会社豊田自動織機
内燃機関の吸気温度制御システム
3日前
株式会社豊田自動織機
繊維構造体、及び繊維強化複合材
3日前
トヨタ自動車株式会社
塗工装置
24日前
トヨタ自動車株式会社
二次電池
24日前
株式会社豊田自動織機
ローリングピストン型電動圧縮機
24日前
株式会社豊田自動織機
ローリングピストン型電動圧縮機
24日前
株式会社豊田自動織機
ローリングピストン型電動圧縮機
24日前
株式会社豊田自動織機
ローリングピストン型電動圧縮機
24日前
株式会社豊田自動織機
ローリングピストン型電動圧縮機
24日前
株式会社豊田自動織機
産業車両及び産業車両の冷却装置
24日前
株式会社豊田自動織機
燃料電池システム及びフォークリフト
18日前
株式会社豊田自動織機
ACインバータ及び絶縁抵抗低下検知方法
24日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ