TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087296
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201855
出願日
2023-11-29
発明の名称
作業機械の自動運転制御システム
出願人
株式会社大林組
代理人
個人
,
個人
主分類
G05D
1/242 20240101AFI20250603BHJP(制御;調整)
要約
【課題】自動運転中の作業機械をシンプルなデータ処理で適切な状態で停止させることができる作業機械の自動運転制御システムを提供する。
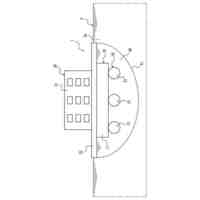
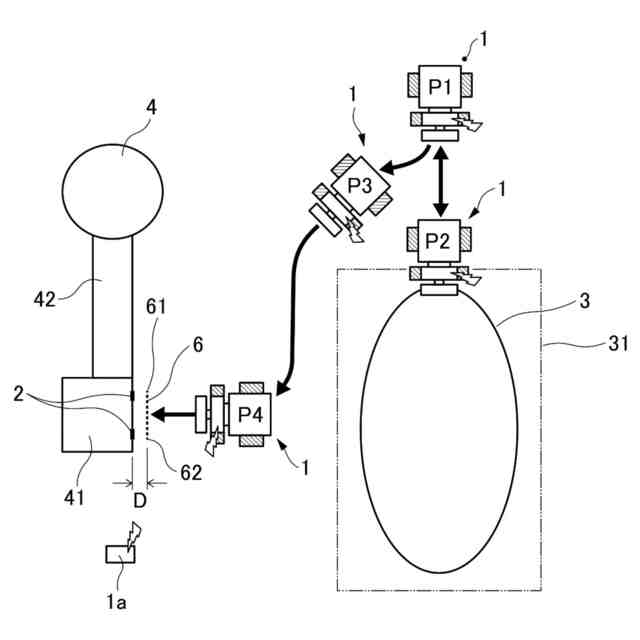
【解決手段】本発明の作業機械1の自動運転制御システムは、作業機械1の停止する際の向きを規定する特徴点2と、作業機械1に設けられ、移動を制御する制御部15と、作業機械1に設けられ、特徴点2を検出する検出部と、を備え、制御部15は、作業機械1が停止位置6で停止する際に、作業機械1が、検出部の検出した特徴点2が規定する向きに従った方向を向いているように、作業機械1の移動制御を行う。
【選択図】図3
特許請求の範囲
【請求項1】
作業機械の自動運転制御システムであって、
前記作業機械の停止する際の向きを規定する特徴点と、
前記作業機械に設けられ、移動を制御する制御部と、
前記作業機械に設けられ、特徴点を検出する検出部と、
を備え、
前記制御部は、前記作業機械が停止位置で停止する際に、前記作業機械が、前記検出部の検出した前記特徴点が規定する前記向きに従った方向を向いているように、前記作業機械の移動制御を行うことを特徴とする自動運転制御システム。
続きを表示(約 470 文字)
【請求項2】
前記特徴点は、前記作業機械が停止位置で停止する際に、前記向きに直交する方向の位置も規定し、
前記制御部は、前記作業機械が停止位置で停止する際に、前記特徴点が規定する前記向きに直交する方向の位置に位置しているように、前記作業機械の移動制御を行うことを特徴とする請求項1に記載の自動運転制御システム。
【請求項3】
前記検出部が、3D-LiDARであり、
前記特徴点が、周囲と識別可能な反射率を有する部材であることを特徴とする請求項1又は請求項2に記載の自動運転制御システム。
【請求項4】
前記作業機械は、更に、位置を検出する位置検出部を備え、
前記制御部は、前記位置検出部の位置検出結果も利用して、前記停止位置に向かう前記作業機械の移動制御を行うことを特徴とする請求項1又は請求項2に記載の自動運転制御システム。
【請求項5】
前記作業機械が、バケットを有する建設機械又は運搬機械であることを特徴とする請求項1又は請求項2に記載の自動運転制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の自動運転制御システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1には、GNSSの受信環境が悪い場所であっても、建設機械の自己位置を高い精度で推定でき、好適に建設機械を自律運転させるために、建設機械の移動可能範囲を示す全体マップを記憶するマップ記憶部と、建設機械周辺の点群情報を取得する点群情報取得部と、点群情報に基づいて建設機械周辺の環境マップを作成するマッピング部と、全体マップと環境マップとに基づいて、全体マップにおける建設機械の自己位置を推定する自己位置推定部と、を備える建設機械の自律運転システムが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2023-15628号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、建設機械(例えば、ホイールローダ等)や運搬機械(例えば、ショベルローダ等)の作業機械では、例えば、土砂、砂利、石炭、バイオマス燃料等の運搬作業に用いられることがあり、正確な位置に、その運搬してきたものを下すことが求められることがある。
【0005】
そして、このためには、運搬先での作業機械の停止に際して、運搬してきたものを下すのに適した状態で作業機械を停止させることが求められる。
したがって、作業機械には、停止の際に、適切な状態で停止させることが求められる場合がある。
【0006】
しかしながら、そのような動作を作業機械に自動運転で行わせるために、複雑なデータ処理を伴わせると、そのために高価な情報処理装置を必要とする上、そのデータ処理を実現するためのソフトウェアの開発も大規模なものとなることから、コストが高くなるという問題がある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、自動運転中の作業機械をシンプルなデータ処理で適切な状態で停止させることができる作業機械の自動運転制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記目的を達成するために以下の構成によって把握される。
本発明の作業機械の自動運転制御システムは、前記作業機械の停止する際の向きを規定する特徴点と、前記作業機械に設けられ、移動を制御する制御部と、前記作業機械に設けられ、特徴点を検出する検出部と、を備え、前記制御部は、前記作業機械が停止位置で停止する際に、前記作業機械が、前記検出部の検出した前記特徴点が規定する前記向きに従った方向を向いているように、前記作業機械の移動制御を行う。
【発明の効果】
【0009】
本発明によれば、自動運転中の作業機械をシンプルなデータ処理で適切な状態で停止させることができる作業機械の自動運転制御システムを提供することができる。
【図面の簡単な説明】
【0010】
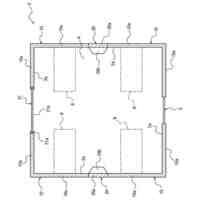
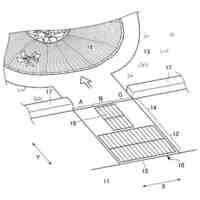
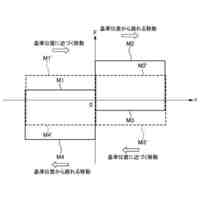
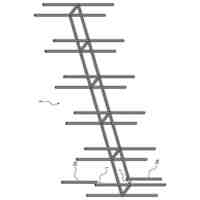
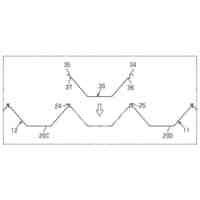
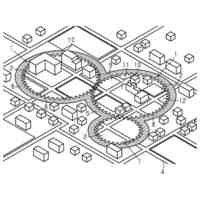
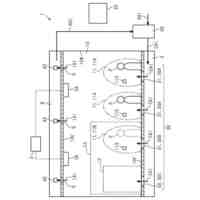
本発明に係る第1実施形態の自動運転制御システムによる、作業機械の移動制御を説明するための図である。
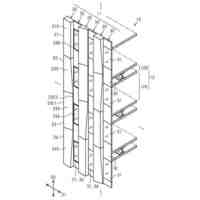
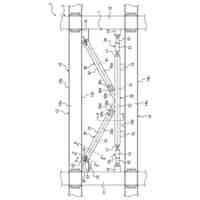
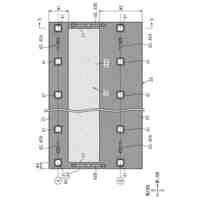
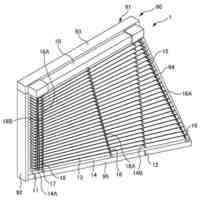
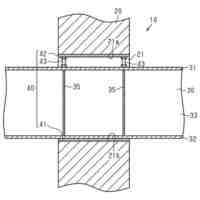
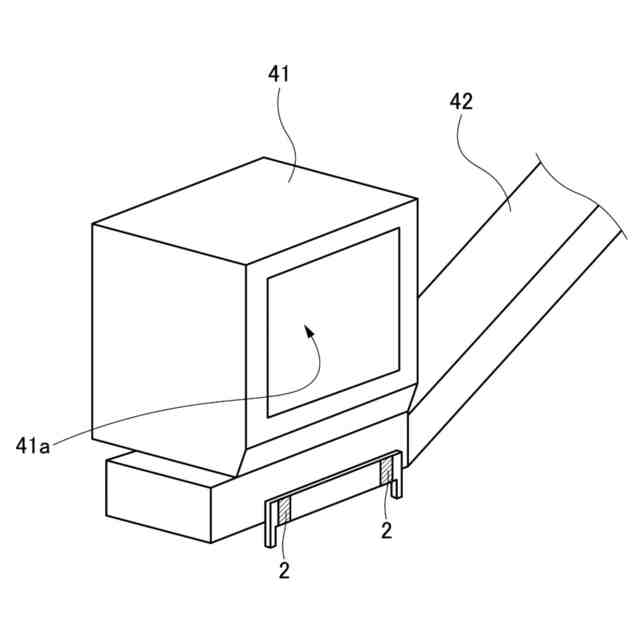
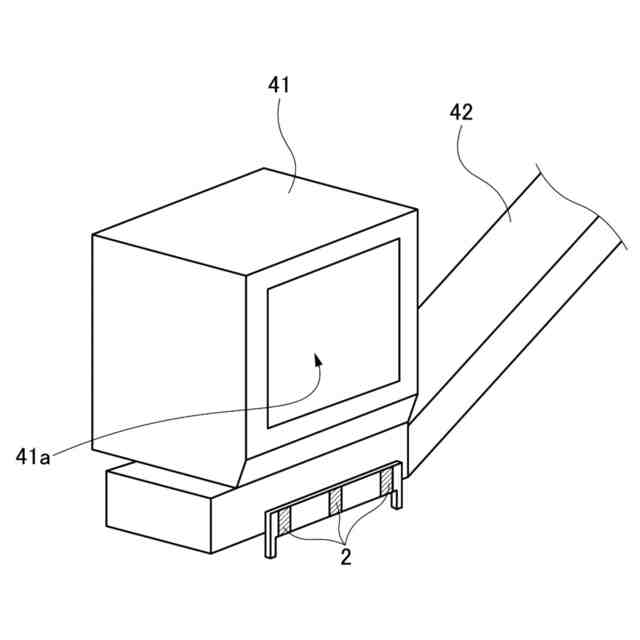
図1の受入口の周辺の一部を拡大した斜視図である。
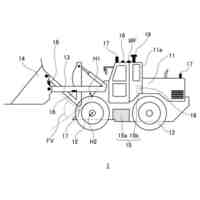
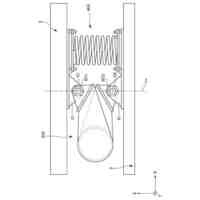
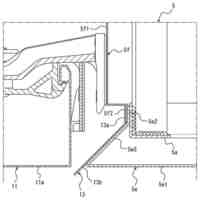
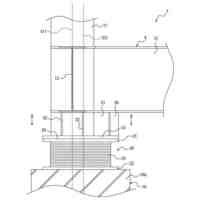
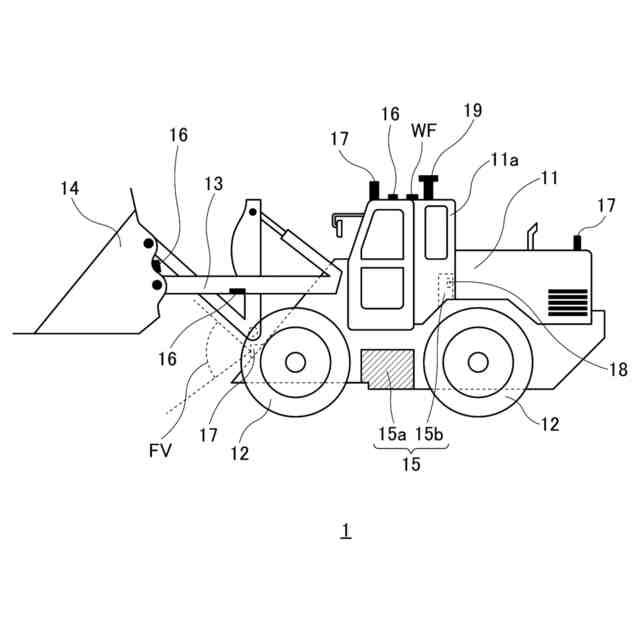
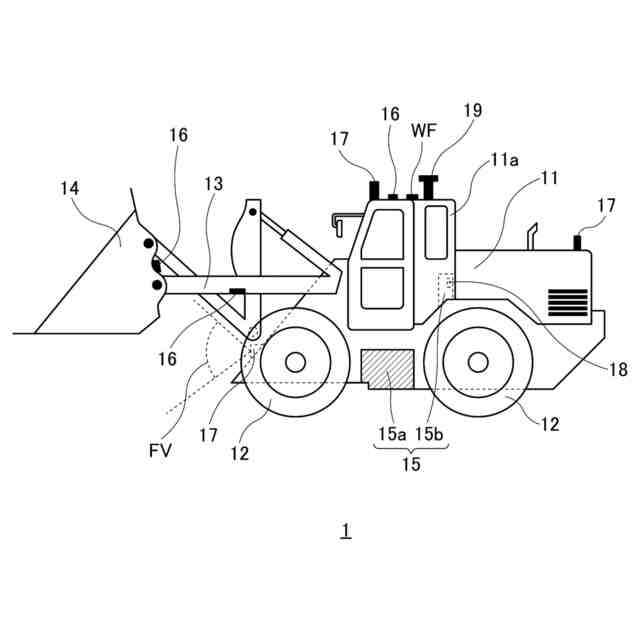
本発明に係る第1実施形態の作業機械を説明するための側面図である。
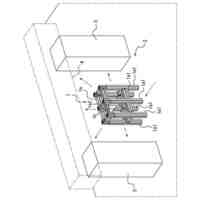
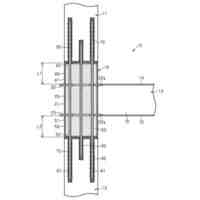
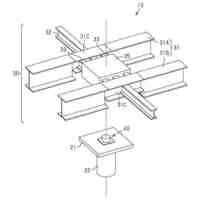
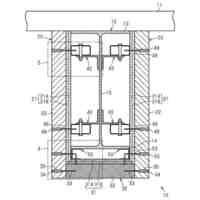
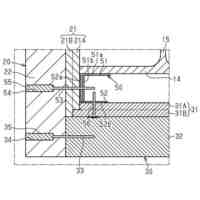
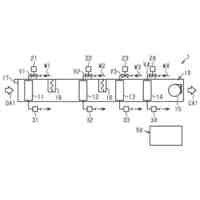
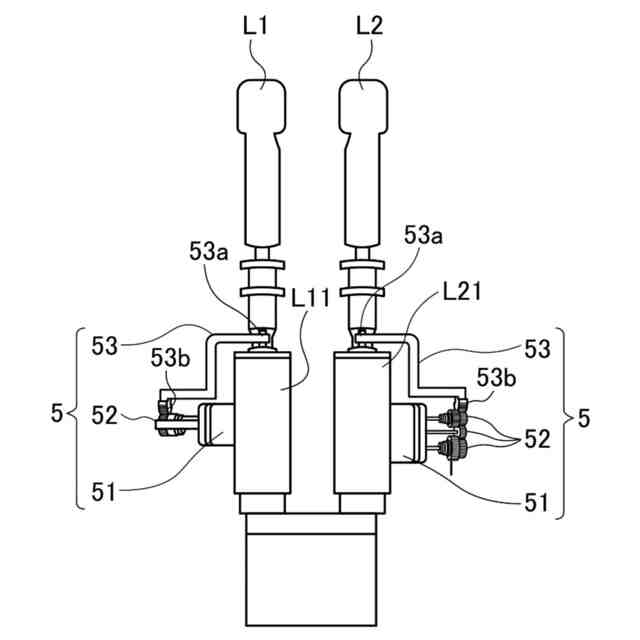
本発明に係る第1実施形態の作業機械の操作レバーを駆動させるアクチュエータを説明するための図である。
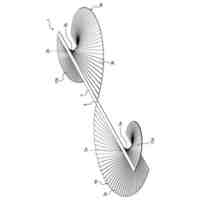
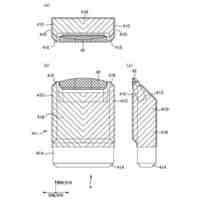
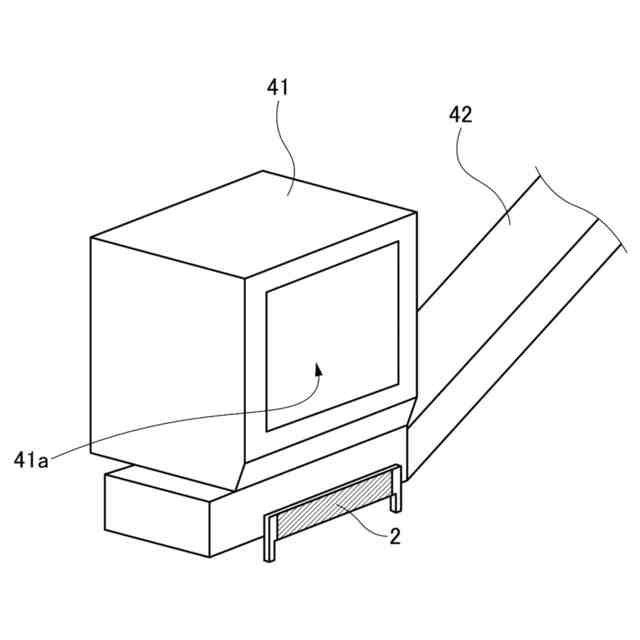
本発明に係る第2実施形態の特徴点を示した図である。
本発明に係る第3実施形態の特徴点を示した図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社大林組
建物
1か月前
株式会社大林組
建物
1か月前
株式会社大林組
歩道橋
4か月前
株式会社大林組
加泥材
1か月前
株式会社大林組
雨水桝蓋
2か月前
株式会社大林組
作業機械
2か月前
株式会社大林組
基礎構造
13日前
株式会社大林組
減衰装置
1か月前
株式会社大林組
減衰装置
1か月前
株式会社大林組
制震構造
2か月前
株式会社大林組
施工方法
3か月前
株式会社大林組
施工方法
3か月前
株式会社大林組
基礎構造
4か月前
株式会社大林組
制振構造
4か月前
株式会社大林組
接続構造
1か月前
株式会社大林組
免震構造物
3か月前
株式会社大林組
ブラインド
3か月前
株式会社大林組
雨除け構造
4か月前
株式会社大林組
免震構造物
4か月前
株式会社大林組
免震建築物
2日前
株式会社大林組
流出防止治具
2か月前
株式会社大林組
屋根構築方法
1か月前
株式会社大林組
監視システム
2日前
株式会社大林組
土壌改良方法
1か月前
株式会社大林組
耐火被覆構造
1か月前
株式会社大林組
耐火被覆構造
1か月前
株式会社大林組
免震建物構造
3か月前
株式会社大林組
耐震間柱構造
4か月前
株式会社大林組
空調システム
4か月前
株式会社大林組
摩擦ダンパー
1か月前
株式会社大林組
カッタビット
3か月前
株式会社大林組
排水システム
4か月前
株式会社大林組
人工地盤構造
3か月前
株式会社大林組
カッタビット
3か月前
株式会社大林組
空調システム
4か月前
株式会社大林組
摩擦ダンパー
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ