TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025087298
公報種別
公開特許公報(A)
公開日
2025-06-10
出願番号
2023201857
出願日
2023-11-29
発明の名称
作業機械
出願人
株式会社大林組
代理人
個人
,
個人
主分類
E02F
9/24 20060101AFI20250603BHJP(水工;基礎;土砂の移送)
要約
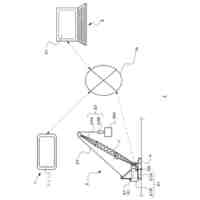
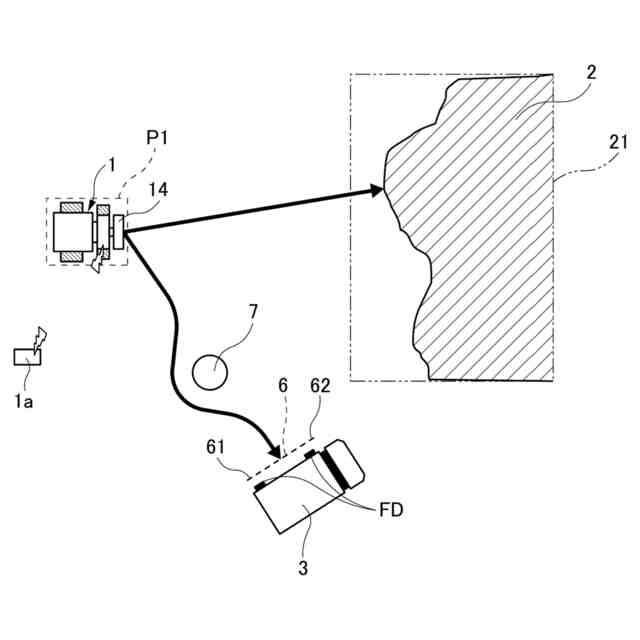
【課題】障害物等が移動した場合であっても、その障害物等を的確に認識できる作業機械を提供する。
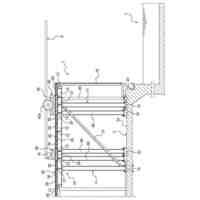
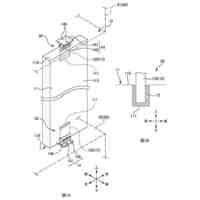
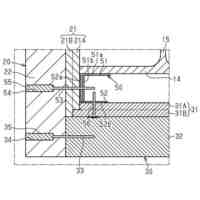
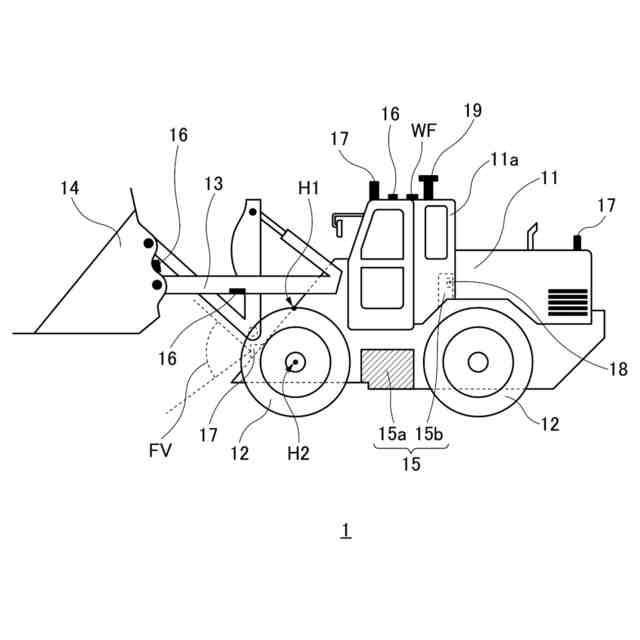
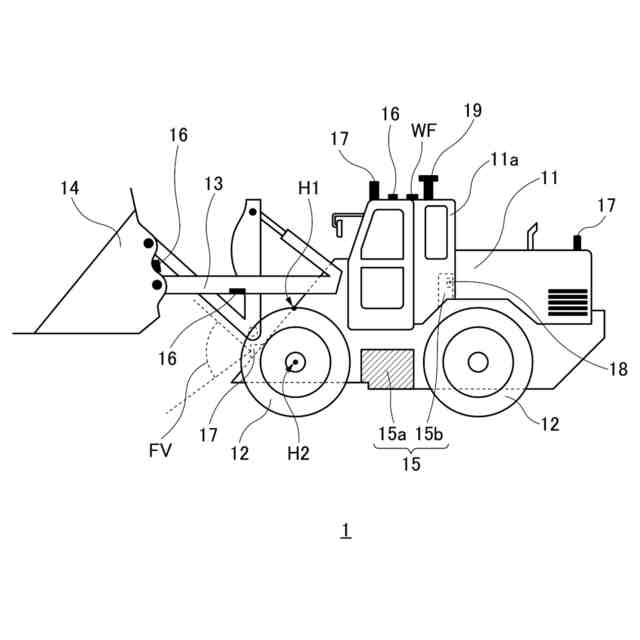
【解決手段】本発明の作業機械1は、フロント側の胴体部11より前方側に延在するアーム13と、アーム13の前方側の端部に設けられたアタッチメントと、胴体部11のフロント外側面に設けられ、フロント側の前方状態を検知する状態検知部と、を備え、状態検知部は、アタッチメントが作業機械1の移動に支障をきたさない範囲で上側に位置する時に、前方視野が確保できるフロント外側面の上下方向下側に設けられている。
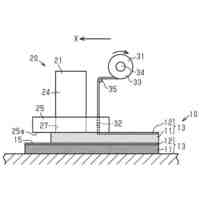
【選択図】図2
特許請求の範囲
【請求項1】
作業機械であって、
フロント側の胴体部より前方側に延在するアームと、
前記アームの前方側の端部に設けられたアタッチメントと、
前記胴体部のフロント外側面に設けられ、フロント側の前方状態を検知する状態検知部と、を備え、
前記状態検知部は、前記アタッチメントが前記作業機械の移動に支障をきたさない範囲で上側に位置する時に、前方視野が確保できる前記フロント外側面の上下方向下側に設けられていることを特徴とする作業機械。
続きを表示(約 370 文字)
【請求項2】
前記胴体部に設けられた左右一対のフロント側の車輪と、
前記胴体部に設けられた左右一対のリア側の車輪と、を備え、
前記状態検知部が、前記フロント側の前記車輪の上下方向上側の最も上側の位置よりも下側に位置することを特徴とする請求項1に記載の作業機械。
【請求項3】
前記状態検知部が、前記フロント側の前記車輪の回転中心の位置よりも上下方向上側に位置することを特徴とする請求項2に記載の作業機械。
【請求項4】
前記状態検知部が、前記フロント外側面の左右方向中央部に位置することを特徴とする請求項1から請求項3のいずれか1項に記載の作業機械。
【請求項5】
前記状態検知部が、3D-LiDARであることを特徴とする請求項1から請求項3のいずれか1項に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、自動で掘削からダンプトラックへの積み込み作業を行うことができるホイールローダやパワーショベル等といった掘削機が開示されており、掘削機の掘削対象への移動やダンプトラックへの移動が、掘削機の左右に設けられた一対のカメラ(左側の左カメラと、右側の右カメラ)で前方を認識して行われている。
【先行技術文献】
【特許文献】
【0003】
特開平10-088625号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、ホイールローダやブルドーザ等の作業機械は、移動機構(例えば、車輪やキャタピラ)を有する本体から前方にアームが延在し、そのアームの前方側の端部にアタッチメント(例えば、バケットやブレード)が設けられており、前方側が確認し難い構成になっている。
【0005】
したがって、前方側に何らかの障害物がある場合、離れた位置からは認識することができるものの、障害物に近づくにつれて、その障害物がバケットに隠れて、確認できなくなる。
【0006】
このため、障害物を迂回する動作は、離れた位置での検知に基づく、予想回避になり、バケットに隠れた後に障害物が移動した場合、適切な回避動作ができないという問題がある。
【0007】
本発明は、このような事情に鑑みてなされたものであり、障害物等が移動した場合であっても、その障害物等を的確に認識できる作業機械を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、上記目的を達成するために以下の構成によって把握される。
(1)本発明の作業機械は、フロント側の胴体部より前方側に延在するアームと、前記アームの前方側の端部に設けられたアタッチメントと、前記胴体部のフロント外側面に設けられ、フロント側の前方状態を検知する状態検知部と、を備え、前記状態検知部は、前記アタッチメントが前記作業機械の移動に支障をきたさない範囲で上側に位置する時に、前方視野が確保できる前記フロント外側面の上下方向下側に設けられている。
【発明の効果】
【0009】
本発明によれば、障害物等が移動した場合であっても、その障害物等を的確に認識できる作業機械を提供することができる。
【図面の簡単な説明】
【0010】
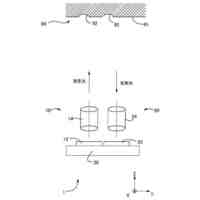
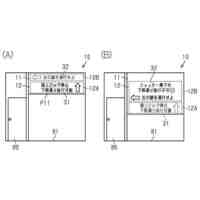
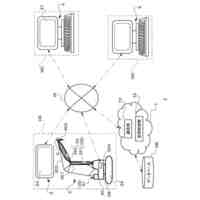
本発明に係る実施形態の自動運転時の作業機械の動作等を説明するための図である。
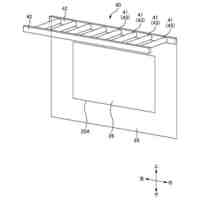
本発明に係る実施形態の作業機械を説明するための側面図である。
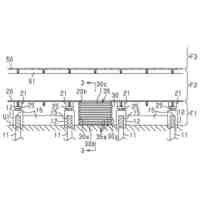
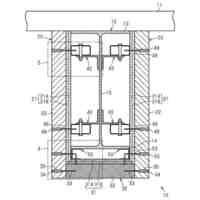
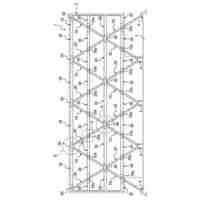
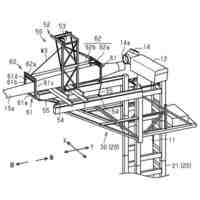
本発明に係る実施形態の作業機械の操作レバーを駆動させるアクチュエータを説明するための図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社大林組
建物
3か月前
株式会社大林組
加泥材
2か月前
株式会社大林組
飛込み台
22日前
株式会社大林組
減衰装置
2か月前
株式会社大林組
減衰装置
2か月前
株式会社大林組
接続構造
2か月前
株式会社大林組
基礎構造
1か月前
株式会社大林組
接合構造
10日前
株式会社大林組
測定方法
22日前
株式会社大林組
建物の構造
9日前
株式会社大林組
免震建築物
1か月前
株式会社大林組
仮設建築物
22日前
株式会社大林組
摩擦ダンパー
3か月前
株式会社大林組
ルーバー構造
1か月前
株式会社大林組
監視システム
1か月前
株式会社大林組
耐火被覆構造
1か月前
株式会社大林組
空調システム
1か月前
株式会社大林組
耐火被覆構造
2か月前
株式会社大林組
耐火被覆構造
2か月前
株式会社大林組
土壌改良方法
2か月前
株式会社大林組
床板の設置方法
22日前
株式会社大林組
シャッター装置
2か月前
株式会社大林組
可搬式充電設備
9日前
株式会社大林組
積層材成型方法
2か月前
株式会社大林組
建物の躯体構造
1か月前
株式会社大林組
建物の躯体構造
1か月前
株式会社大林組
地震損失評価方法
2か月前
株式会社大林組
安全支援システム
1か月前
株式会社大林組
鋼矢板の圧入方法
8日前
株式会社大林組
日射遮蔽発電装置
1か月前
株式会社大林組
リフトアップ装置
23日前
株式会社大林組
リフトアップ装置
23日前
株式会社大林組
作業支援システム
1か月前
株式会社大林組
建築物及び建築方法
23日前
株式会社大林組
新設床版の設置工法
1か月前
株式会社大林組
袋体付き排水パイプ
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ