TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025084332
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198165
出願日
2023-11-22
発明の名称
走行車および走行車システム
出願人
オークラ輸送機株式会社
代理人
個人
,
個人
主分類
G05D
1/244 20240101AFI20250527BHJP(制御;調整)
要約
【課題】目標地点への自律移動の精度が向上した走行車を提供する。
【解決手段】目標地点へ自律移動する走行車12である。走行車12は、目標地点に設置された大サイズのマーカ36と小サイズのマーカ37に基づいて移動する。走行車12が目標地点から離れた位置で、走行車12の画像取得部25が撮影した大サイズのマーカ36と小サイズのマーカ37との画像に対する画像処理を実行し、大サイズのマーカ36に対する走行車12の相対姿勢を認識し、かつ、小サイズのマーカ37に対する走行車12の相対位置を認識する。認識した走行車12の相対姿勢および相対位置から目標地点へ移動する走行軌道を生成し、走行軌道に沿って走行車12が移動する。走行車12が目標地点に接近した状態で、小サイズのマーカ37の撮影画像に対する画像処理を実行し、走行車12の相対位置および相対姿勢を小サイズのマーカ37に基づいて認識する。
【選択図】図1
特許請求の範囲
【請求項1】
目標地点へ自律移動する走行車であって、
本体部と、
前記本体部に設置され、前記本体部を移動させる駆動部と、
前記本体部に設置され、前記本体部の外界を撮影する画像取得部と、
前記駆動部と前記画像取得部に接続され、前記駆動部の駆動指令の出力と、前記画像取得部が取得した画像の画像処理とを実行する制御装置とを備え、
前記制御装置は、前記目標地点に対応して並んで設置された少なくとも第1のマーカと、前記目標地点から離れた位置で前記画像取得部が取得した画像において前記第1のマーカよりも相対姿勢の認識精度が高くなる第2のマーカとを含むマーカに基づいて前記走行車を移動させる目標移動動作において、
前記走行車が前記目標地点から離れた位置で、前記走行車の前記画像取得部が撮影した画像に含まれる前記第2のマーカおよび/または前記第1のマーカとの画像に対する画像処理を実行して、前記第2のマーカに対する前記走行車の相対姿勢を認識し、かつ、前記第2のマーカまたは前記第1のマーカに対する前記走行車の相対位置を認識し、
認識した前記走行車の相対姿勢および相対位置から前記目標地点へ移動する走行軌道を生成し、前記走行軌道に沿って前記走行車が移動するように前記駆動部を駆動させ、
前記走行車が前記目標地点に接近した位置で、前記第1のマーカの撮影画像に対する画像処理を実行して、前記走行車の相対位置および相対姿勢を前記第1のマーカに基づいて認識する
ことを特徴とする走行車。
続きを表示(約 2,100 文字)
【請求項2】
前記制御装置は、前記走行車の前記目標地点への移動途中で、前記走行車の相対姿勢の認識を前記第2のマーカから前記第1のマーカに基づいて認識するように認識対象のマーカを変更する
ことを特徴とする請求項1に記載の走行車。
【請求項3】
前記第1のマーカは小サイズのマーカであり、前記第2のマーカは前記第1のマーカよりもサイズが大きい大サイズのマーカであって、
前記画像取得部は、前記本体部が前記目標地点から離れた位置では前記小サイズのマーカ全体と前記大サイズのマーカ全体とを同時に撮影可能であり、前記本体部が前記目標地点に接近した位置では前記小サイズのマーカ全体と前記大サイズのマーカとの一部または小サイズのマーカ全体のみが撮影可能である
ことを特徴とする請求項2に記載の走行車。
【請求項4】
目標地点へ自律移動する走行車を目標地点で停止させる走行車システムであって、
本体部と、前記本体部に設置され、前記本体部を移動させる駆動部と、前記本体部に設置され、所定の視野を有し、前記本体部の外界を撮影する画像取得部と、前記駆動部と前記画像取得部に接続され、前記駆動部の駆動指令の出力および前記画像取得部が取得した画像の画像処理を実行する制御装置とを有する走行車と、
前記目標地点に対応する位置に上下方向に並んで設置され、上方に設置された大サイズのマーカと、下方に設置された小サイズのマーカとを含むマーカとを備え、
前記画像取得部は、前記小サイズのマーカの下端部が前記視野における上下方向視野角の下端部付近に位置して前記視野における上下方向視野角の中心線が上方を向くように前記本体部に設置され、
前記目標地点から前記走行車が離れた状態で、前記画像取得部の前記視野内に前記小サイズおよび前記大サイズのマーカの全部が含まれ、前記目標地点に前記走行車が位置する状態で、前記画像取得部の前記視野内に前記小サイズのマーカの全体が含まれ、前記大サイズのマーカの一部または全部が含まれない
ことを特徴とする走行車システム。
【請求項5】
目標地点へ自律移動する走行車を目標地点で停止させる走行車システムであって、
本体部と、前記本体部に設置され、前記本体部を移動させる駆動部と、前記本体部に設置され、所定の視野を有し、前記本体部の外界を撮影する画像取得部と、前記駆動部と前記画像取得部に接続され、前記駆動部の駆動指令の出力および前記画像取得部が取得した画像の画像処理とを実行する制御装置とを有する走行車と、
前記目標地点に対応する位置に上下方向に並んで設置され、上方に設置された小サイズのマーカと、下方に設置された大サイズのマーカとを含むマーカとを備え、
前記画像取得部は、前記小サイズのマーカの上端部が前記視野における上下方向視野角の上端部付近に位置して前記視野における上下方向視野角の中心線が下方を向くように前記本体部に設置され、
前記目標地点から前記走行車が離れた状態で、前記画像取得部の前記視野内に前記小サイズおよび前記大サイズのマーカの全部が含まれ、前記目標地点に前記走行車が位置する状態で、前記画像取得部の前記視野内に前記小サイズのマーカの全体が含まれ、前記大サイズのマーカの一部または全部が含まれない
ことを特徴とする走行車システム。
【請求項6】
前記大サイズのマーカおよび前記小サイズのマーカはいずれも矩形に形成されており、前記大サイズのマーカおよび前記小サイズのマーカの中心が上下方向の同一軸線上に位置され、かつ、同一平面状に設けられている
ことを特徴とする請求4または5に記載の走行車システム。
【請求項7】
目標地点へ自律移動する走行車を目標地点で停止させる走行車システムであって、
本体部と、前記本体部に設置され、前記本体部を移動させる駆動部と、前記本体部に設置され、所定の視野を有し、前記本体部の外界を撮影する画像取得部と、前記駆動部と前記画像取得部に接続され、前記駆動部の駆動指令の出力および前記画像取得部が取得した画像の画像処理とを実行する制御装置とを有する走行車と、
前記目標地点に設置され、前記目標地点に位置する前記本体部と近接対向する位置に形成された対向凸面と、前記本体部と対向しつつ前記対向凸面よりも前記本体部から離れる位置に形成された対向凹面とを有する停止ステーションと、
前記対向凹面に設置されたマーカと備え、
前記マーカは、前記停止ステーションの前記対向凸面に前記本体部が近接対向した状態で、前記画像取得部の最短撮影距離よりも遠くに位置する
ことを特徴とする走行車システム。
【請求項8】
前記マーカは、並んで配置された大サイズのマーカと小サイズのマーカを含み、前記停止ステーションの前記対向凸面に前記本体部が近接対向した状態で、前記画像取得部の視野内に前記小サイズのマーカの全体が含まれ、前記大サイズのマーカの一部または全部が含まれない
ことを特徴とする請求項7に記載の走行車システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、目標地点へ自律移動する走行車、および目標地点へ自律移動する走行車を目標地点に到達させる走行車システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、例えば特許文献1に記載されているように、ロボットなどの走行車に設置されたカメラが目標地点に設置されたマーカを撮影することにより、マーカに対する走行車の相対位置・姿勢を認識し、認識した相対位置・姿勢から走行車の走行軌道を生成し、目標地点へ向けて走行車を接近走行させる技術が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2015-121928号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のような技術では、マーカと走行車の相対位置・姿勢の認識精度は撮影画像内のマーカのサイズによって左右される。つまり、マーカのサイズを大きくすれば、走行車とマーカとが離れた遠距離からでも撮影画像内のマーカのサイズが大きくなるため、走行車の相対位置・姿勢の認識精度は向上する。しかし、走行車がマーカに接近する方向に走行する場合、走行車のカメラの視野からマーカがはみ出てしまうため、マーカの認識が不可能になり、目標地点への移動が困難になる。
【0005】
本発明は、目標地点への自律移動の精度が向上した走行車および走行車システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明の走行車は、目標地点へ自律移動する走行車であって、本体部と、前記本体部に設置され、前記本体部を移動させる駆動部と、前記本体部に設置され、前記本体部の外界を撮影する画像取得部と、前記駆動部と前記画像取得部に接続され、前記駆動部の駆動指令の出力と、前記画像取得部が取得した画像の画像処理とを実行する制御装置とを備え、前記制御装置は、前記目標地点に対応して並んで設置された少なくとも第1のマーカと、前記目標地点から離れた位置で前記画像取得部が取得した画像において前記第1のマーカよりも相対姿勢の認識精度が高くなる第2のマーカとを含むマーカに基づいて前記走行車を移動させる目標移動動作において、前記走行車が前記目標地点から離れた位置で、前記走行車の前記画像取得部が撮影した画像に含まれる前記第2のマーカおよび/または前記第1のマーカとの画像に対する画像処理を実行して、前記第2のマーカに対する前記走行車の相対姿勢を認識し、かつ、前記第2のマーカまたは前記第1のマーカに対する前記走行車の相対位置を認識し、認識した前記走行車の相対姿勢および相対位置から前記目標地点へ移動する走行軌道を生成し、前記走行軌道に沿って前記走行車が移動するように前記駆動部を駆動させ、前記走行車が前記目標地点に接近した位置で、前記第1のマーカの撮影画像に対する画像処理を実行して、前記走行車の相対位置および相対姿勢を前記第1のマーカに基づいて認識する。
【発明の効果】
【0007】
本発明によれば、目標地点への自律移動の精度が向上した走行車および走行車システムを提供できる。
【図面の簡単な説明】
【0008】
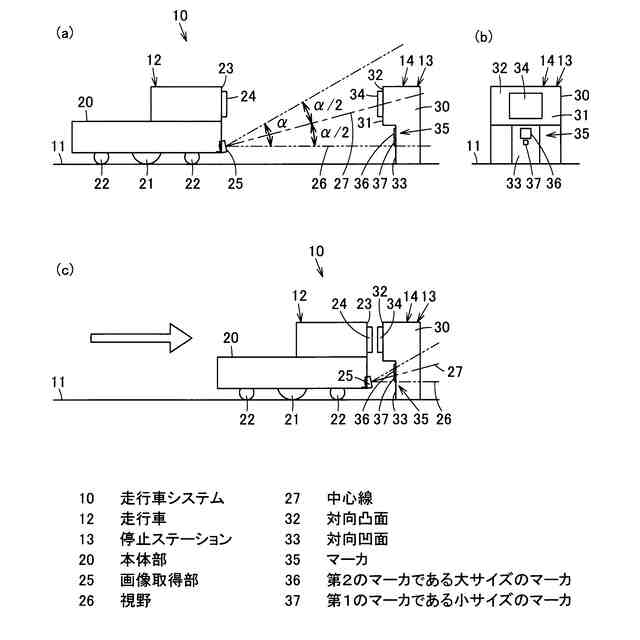
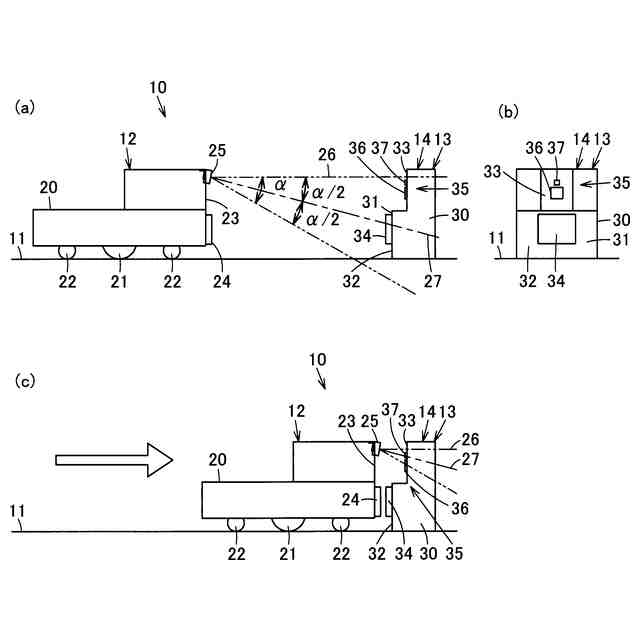
本発明の走行車システムの第1の実施の形態を示し、(a)は走行車が給電ステーションから離れて位置する状態の側面図、(b)は給電ステーションの正面図、(c)は走行車が給電ステーションに接近した状態の側面図である。
同上給電ステーションに設置されるマーカの正面図である。
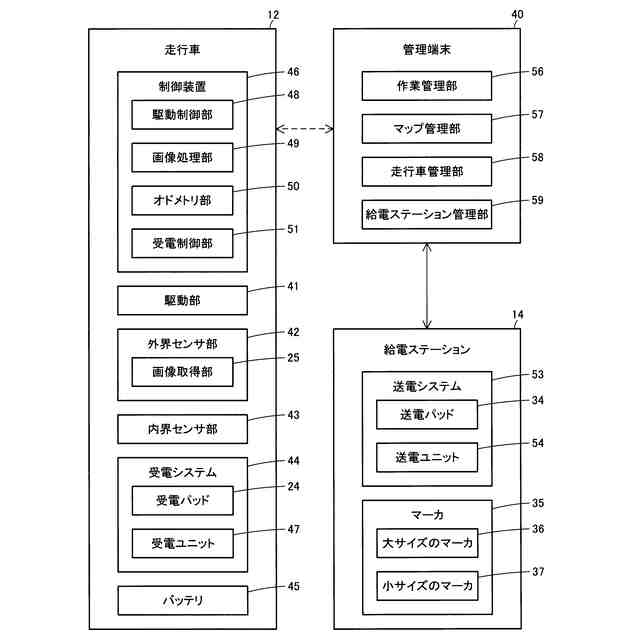
同上走行車システムのブロック図である。
同上走行車の給電ステーションへの目標移動動作を(a)~(h)に示す説明図である。
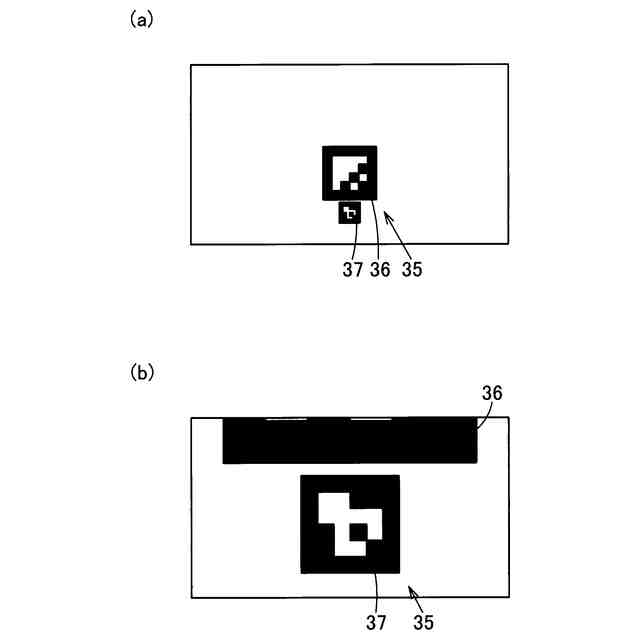
同上走行車の画像取得部によって撮影される画像を示し、(a)は走行車が給電ステーションから離れて位置する状態での撮影画像の説明図、(b)は走行車が給電ステーションに接近した状態での撮影画像の説明図である。
本発明の走行車システムの第2の実施の形態を示し、(a)は走行車が給電ステーションから離れて位置する状態の側面図、(b)は給電ステーションの正面図、(c)は走行車が給電ステーションに接近した状態の側面図である。
【発明を実施するための形態】
【0009】
以下、本発明の第1の実施の形態を、図1ないし図5を参照して説明する。
【0010】
図1に走行車システム10を示す。走行車システム10は、設備内の床面11上を目標地点へ自律移動する走行車12を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
21日前
個人
作業車両自動化システム
2日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
10日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
トヨタ自動車株式会社
生産管理システム
7日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
今日
株式会社オプトン
制御プログラム生成装置
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
株式会社鷺宮製作所
制御装置
1か月前
三菱電機株式会社
自己位置推定装置
2か月前
トヨタ自動車株式会社
減圧弁
4日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
マーク ヘイリー
消防ロボット
14日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社やまびこ
走行制御装置
3か月前
株式会社テイエルブイ
減圧弁の制御装置
16日前
株式会社タブチ
減圧弁
3か月前
アズビル株式会社
制御システムおよび制御方法
10日前
株式会社戸張空調
アクセル・ブレーキ操作装置
1か月前
アズビル株式会社
制御システムおよび制御方法
10日前
オムロン株式会社
安全装置
1か月前
三菱電機株式会社
電源回路
1か月前
WHILL株式会社
電動モビリティ
2か月前
株式会社計数技研
移動体、及びプログラム
2か月前
シンフォニアテクノロジー株式会社
異常検知装置
1か月前
株式会社ダイフク
飛行体制御システム
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ