TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025071584
公報種別
公開特許公報(A)
公開日
2025-05-08
出願番号
2023181870
出願日
2023-10-23
発明の名称
自走式装置
出願人
日本信号株式会社
代理人
弁理士法人朝日特許事務所
主分類
G05D
1/43 20240101AFI20250428BHJP(制御;調整)
要約
【課題】未完成の地図から生成された経路に沿って自走を開始したとしても、自走中に新たに検知された部分を用いて経路を再生成して自走の効率を向上させる装置を提供する。
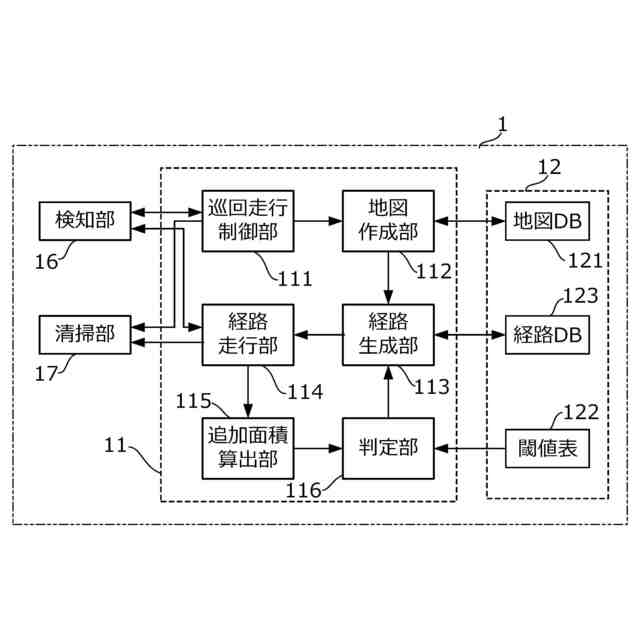
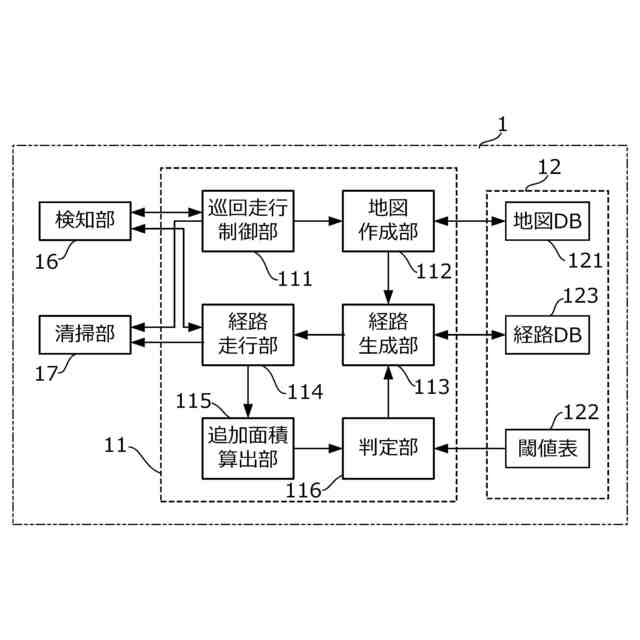
【解決手段】巡回走行制御部111は、検知部16を制御して自装置に周囲を検知させながら清掃部17を制御して外縁に沿って自装置を自走させる。地図作成部112は、検知済みの部分のデータに基づいて、清掃領域の外縁の形状と、障害物の位置・形状を特定し、地図を作成する。経路生成部113は、検知済みの部分を走行する経路を生成する。経路走行部114は、経路に沿って自装置を走行させながら周囲を検知させる。追加面積算出部115は、新たに検知された追加部分の面積を算出する。判定部116は、追加部分の面積が閾値を超えた、と判定する場合、経路生成部113に追加部分を含めた検知済みの領域であって未だ走行していない領域を走行するための新たな経路を再生成させる。
【選択図】図8
特許請求の範囲
【請求項1】
周囲を検知しながら外縁に沿って領域を一周し、該領域の検知済みの部分を走行する経路を生成し、周囲を検知しながら該経路を走行して新たに検知された追加部分の面積が閾値を超えたら前記経路を再生成する自走式装置。
続きを表示(約 270 文字)
【請求項2】
前記領域に対する走行済みの部分の面積比が所定値になるまで前記経路を再生成する
請求項1に記載の自走式装置。
【請求項3】
前記閾値が前記領域の全面積に応じて決められる
請求項1に記載の自走式装置。
【請求項4】
前記閾値が前記経路を生成した回数に応じて決められる
請求項1に記載の自走式装置。
【請求項5】
前記追加部分の面積が前記閾値を超える前に前記経路を走行し終わった場合に、該追加部分を走行する経路を再生成する
請求項1に記載の自走式装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自走式装置が自走する経路を自動生成する技術に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
自動清掃ロボット、警備・点検ロボット等、自ら走行して処理を行う種々の自走式装置が開発されている。特に、自走式装置に決められた領域をくまなく走行させる技術は、近年、需要が高まっている。この自走式装置によれば、作業者の習熟度、集中力等に影響を受けずに、決められた領域に対して清掃、警備、点検等の各種の処理を、一定の品質で遂行することができる。
【0003】
ここで、決められた領域をあたかも塗りつぶすように、自走式装置にくまなく走行させるために、自走式装置自身(又はその制御装置)は、その領域を走行する経路を取得しなければならない。そこで、自走式装置が自身の自走する経路を自ら生成する各種の技術が検討されている。
【0004】
特許文献1は、住居内の壁の内壁面から所定の間隔を空けて形成される仮想面に沿ってロボット本体を繰り返し周回させつつ1周回毎にこの仮想面を内側にシフトさせるようにしてロボット本体を自走させる自走式ロボットを開示している。
【0005】
特許文献2は、所定の走行規則で走行しながら掃除する基本掃除動作を行い、次に、基本掃除動作では掃除されなかった未掃除の領域を掃除する未掃除領域掃除動作を行い、その後、障害物の周囲を掃除する周辺掃除動作を行うロボットクリーナーを開示している。
【0006】
特許文献3は、作業対象領域内に存在する障害物を検知し、作業対象領域をセル単位に分割し、作業時、この作業対象領域に検知した障害物及び作業済みとなった位置をセル単位で記録して地図を作成し、現在位置から地図中の最も近い未作業セルを認識し、進行方向前方に障害物を検知した時、認識した未作業セルまで自律走行しながら作業を行う自律走行ロボットを開示している。
【先行技術文献】
【特許文献】
【0007】
特開2005-339408号公報
特開2005-211366号公報
特開2004-326692号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
ところで自走式装置は、自走の対象となる領域の外縁の形状、及び、領域内に置かれた障害物の位置等、領域についての情報を自走の前に知らない場合が多い。そのため、上記の領域をくまなく自走するための経路は無数に存在するが、領域についての情報を知らずに生成される経路の中には、同じところを何度も走行したり、不要な旋回をしたり、一回の直進で走行できる箇所を複数に分割して走行したりする非効率なものもある。
【0009】
特許文献1に記載の自走式ロボットは、ロボット本体が自走した住居内の各走行ルートに基づいて壁の位置及び壁から離間する部屋の中央部分にある障害物の位置を取得して住居内の全領域の地図情報を生成する。しかし、この特許文献1に記載の自走式ロボットは、例えば、清掃対象領域に仕切りが多いと、中央部の清掃残しがなくなるまで何周も回る必要が生じる。
【0010】
特許文献2に記載のロボットクリーナーは、基本掃除動作で掃除されなかった未掃除の領域を未掃除領域掃除動作で掃除し、最後に周辺掃除動作で障害物の周囲を掃除する。しかし、この特許文献2に記載のロボットクリーナーは、地図が未完成の状態で塗りつぶす走行をするため、どの方向に探索していけば効率良く走行できるのかわからない。そのため、このロボットクリーナーは、他の自走式装置に比べて、一つの経路あたりの長さが短く、旋回回数が多くなり、走行の効率が悪くなることがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日本信号株式会社
光検知システム
14日前
日本信号株式会社
列車接近警報装置
10日前
日本信号株式会社
自動列車運転装置
10日前
日本信号株式会社
自動列車運転装置
24日前
日本信号株式会社
ホームドア制御装置
1か月前
日本信号株式会社
交通信号制御システム
1か月前
日本信号株式会社
遮断機監視装置及び遮断機監視方法
1か月前
個人
生産早送り装置
3日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
28日前
個人
作業車両自動化システム
9日前
愛知製鋼株式会社
目標軌跡の設定方法
17日前
ローム株式会社
半導体集積回路
2か月前
株式会社ダイフク
搬送設備
1か月前
トヨタ自動車株式会社
生産管理システム
14日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
トヨタ自動車株式会社
ペダル機構
2か月前
トヨタ自動車株式会社
移動制御システム
3日前
株式会社ダイフク
搬送設備
2か月前
株式会社ダイフク
搬送設備
7日前
株式会社オプトン
制御プログラム生成装置
1か月前
株式会社鷺宮製作所
制御装置
1か月前
三菱電機株式会社
自己位置推定装置
3か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
11日前
株式会社ダイフク
物品搬送設備
1か月前
マーク ヘイリー
消防ロボット
21日前
株式会社ダイフク
物品搬送設備
1か月前
トヨタ自動車株式会社
移動体、及び制御方法
3か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
アズビル株式会社
制御システムおよび制御方法
17日前
アズビル株式会社
制御システムおよび制御方法
17日前
株式会社戸張空調
アクセル・ブレーキ操作装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ