TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025073263
公報種別
公開特許公報(A)
公開日
2025-05-13
出願番号
2023183878
出願日
2023-10-26
発明の名称
自己位置推定装置
出願人
三菱電機株式会社
代理人
個人
,
個人
主分類
G05D
1/43 20240101AFI20250502BHJP(制御;調整)
要約
【課題】本開示は、安定的に自己位置の推定を行うことが可能な自己位置推定装置を提供することを目的とする。
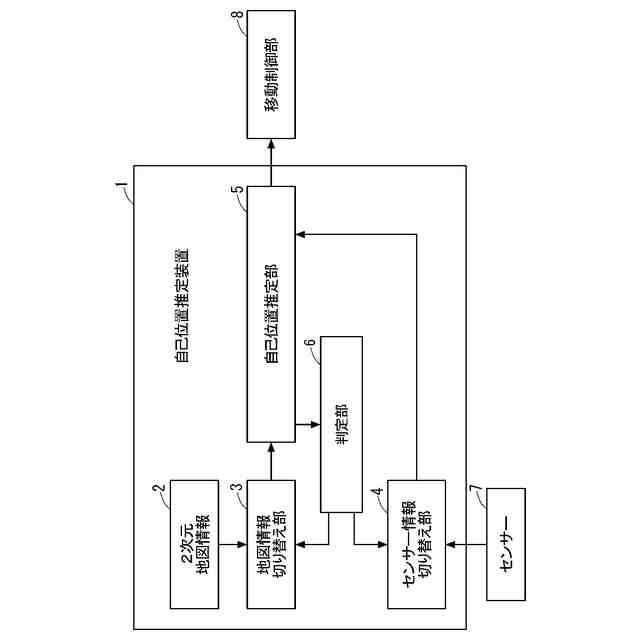
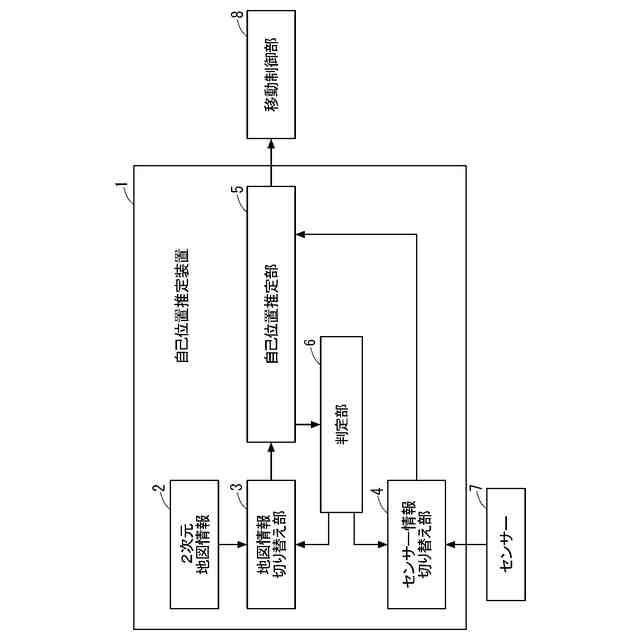
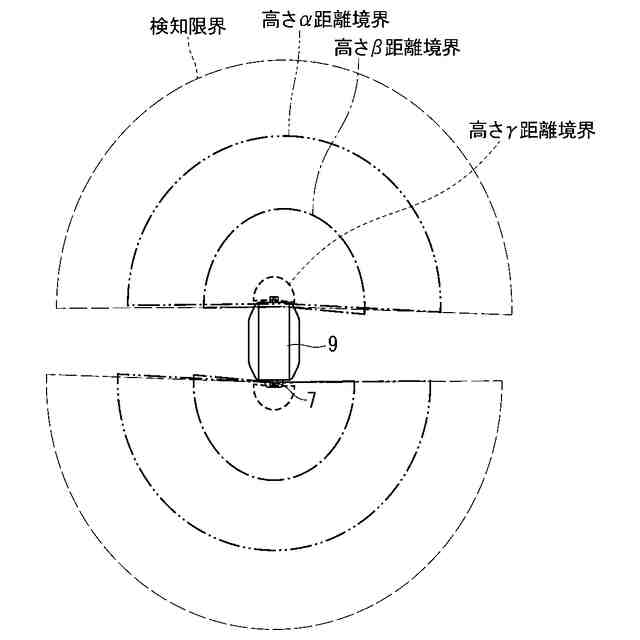
【解決手段】本開示による自己位置推定装置は、自律移動する移動体の移動範囲における高さ方向または進行方向の複数の2次元地図を含む2次元地図情報と、移動体の周辺を検知したセンサー情報とに基づいて、移動体の自己位置を推定する自己位置推定部と、予め定められた条件に基づいて、自己位置推定部が推定する際に用いる複数の2次元地図のうちの1つとセンサー情報の検知領域とを決定する決定部とを備える。
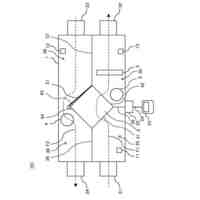
【選択図】図1
特許請求の範囲
【請求項1】
自律移動する移動体の移動範囲における高さ方向または進行方向の複数の2次元地図を含む2次元地図情報と、前記移動体の周辺を検知したセンサー情報とに基づいて、前記移動体の自己位置を推定する自己位置推定部と、
予め定められた条件に基づいて、前記自己位置推定部が推定する際に用いる前記複数の2次元地図のうちの1つと前記センサー情報の検知領域とを決定する決定部と、
を備える、自己位置推定装置。
続きを表示(約 930 文字)
【請求項2】
前記決定部は、前記複数の2次元地図のうちの1つと前記センサー情報の検知領域との組み合わせを複数保持し、前記予め定められた条件に基づいて前記複数の組み合わせから1つの組み合わせを決定する、請求項1に記載の自己位置推定装置。
【請求項3】
前記複数の2次元地図のそれぞれにおける前記移動体の自己位置に対する確率分布に基づく分散値を予め保持し、
前記決定部は、前記移動体が自律移動する際に取得した前記センサー情報に基づく分散値と、前記予め保持している前記分散値との差異に基づいて、前記複数の2次元地図のうちの1つと前記センサー情報の検知領域とを決定する、請求項1に記載の自己位置推定装置。
【請求項4】
前記複数の2次元地図の全てにおいて各前記分散値の差異が予め定められた閾値よりも大きい場合は前記移動体の自律移動を一時停止させ、その後、前記差異が前記閾値以下になってから前記移動体を再始動させる、請求項3に記載の自己位置推定装置。
【請求項5】
前記移動体の移動範囲内の各位置に応じた前記2次元地図の選択を示す選択マップを保持する、請求項1に記載の自己位置推定装置。
【請求項6】
前記決定部は、前記移動体の車輪の回転情報に基づいて、前記センサー情報の検知領域を決定する、請求項1に記載の自己位置推定装置。
【請求項7】
前記2次元地図情報は、2つ以上の前記2次元地図を組み合わせた複合地図を含む、請求項1に記載の自己位置推定装置。
【請求項8】
前記自己位置推定部は、前記移動体から予め定められた距離以内で検知された前記センサー情報に基づいて前記移動体の位置を推定する、請求項1に記載の自己位置推定装置。
【請求項9】
前記複数の組み合わせは前記移動体の前後方向である、請求項2に記載の自己位置推定装置。
【請求項10】
前記高さ方向の2次元地図は水平方向の2次元地図であり、前記進行方向の2次元地図は垂直方向の2次元地図である、請求項1に記載の自己位置推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自律移動する移動体の自己位置を推定する自己位置推定装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
周囲の環境を把握しながら目的の場所まで自律移動する移動体を自律移動体という。自律移動体は、特定の空間において自身が走行可能か否かを判断する際に使用する環境地図情報を事前に保持しており、移動中に周囲を観測し、周囲に存在する障害物を回避して現在地から目的地まで移動する移動経路を生成する。そして、自律移動体は、生成した移動経路に沿って目的地まで走行する。自律移動体は、移動経路に沿って走行する際、環境地図情報と周囲を検知するセンサー情報とをマッチングさせて自己位置を推定しながら、移動経路に含まれるポイント(例えば、目的地、経由地)を自律走行する。
【0003】
自律移動体は、人または障害物などが存在する場所でも同様にセンサー情報を用いて位置を推定しながら自律移動をするが、このとき、ある程度の信頼度または一致度を判定する自己位置推定機能を活用する。
【0004】
従来、複数のセンサーが取得した情報に基づいて移動体の位置および姿勢などを推定し、当該推定した位置および姿勢の信頼度が低い場合に補正する技術が開示されている(例えば、特許文献1参照)。また、第1のセンサーが取得した情報を用いて移動体の位置推定を行うとともに当該推定結果に関する第1の信頼度を取得し、第2のセンサーが取得した情報(第1のセンサーが取得した情報とは異なる情報)を用いて移動体の位置推定を行うとともに当該推定結果に関する第2の信頼度を取得し、第1の信頼度および第2の信頼度のうち信頼度が高い方の推定結果を用いて移動体の自己位置を取得する技術が開示されている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
特開2022-42630号公報
特開2021-18638号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
自律移動体では、人、障害物、または仮に置かれている設置物などが移動空間上に存在する場合、それらの情報も自己位置推定時のマッチングに使用される、あるいは、障害物などによって本来センサーで取得可能な情報を取得することができないといった状況が生じ得る。このような状況では、環境地図情報とセンサーが取得した情報とがマッチングしないため、自己位置を推定することができなくなる。また、環境地図には、ガラスなどの透過物または反射物などによって、センサーが正確に検知することが困難な場所が含まれている。
【0007】
このような自己位置の推定を困難にする要因に対して、できるだけセンサーによる検知量および検知の種類を増やすことなく、安定的に自己位置の推定を行うことが課題である。
【0008】
本開示は、このような問題を解決するためになされたものであり、安定的に自己位置の推定を行うことが可能な自己位置推定装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記の課題を解決するために、本開示による自己位置推定装置は、自律移動する移動体の移動範囲における高さ方向または進行方向の複数の2次元地図を含む2次元地図情報と、移動体の周辺を検知したセンサー情報とに基づいて、移動体の自己位置を推定する自己位置推定部と、予め定められた条件に基づいて、自己位置推定部が推定する際に用いる複数の2次元地図のうちの1つとセンサー情報の検知領域とを決定する決定部とを備える。
【発明の効果】
【0010】
本開示によれば、安定的に自己位置の推定を行うことが可能となる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
三菱電機株式会社
計測器
19日前
三菱電機株式会社
冷蔵庫
12日前
三菱電機株式会社
給湯機
1か月前
三菱電機株式会社
冷蔵庫
1か月前
三菱電機株式会社
ミラー
1か月前
三菱電機株式会社
照明装置
15日前
三菱電機株式会社
回転電機
5日前
三菱電機株式会社
電源回路
1か月前
三菱電機株式会社
照明器具
28日前
三菱電機株式会社
回転電機
1日前
三菱電機株式会社
照明装置
13日前
三菱電機株式会社
送風装置
29日前
三菱電機株式会社
電子機器
11日前
三菱電機株式会社
照明装置
21日前
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
換気装置
今日
三菱電機株式会社
照明器具
7日前
三菱電機株式会社
照明装置
19日前
三菱電機株式会社
照明器具
今日
三菱電機株式会社
照明装置
1か月前
三菱電機株式会社
加熱調理器
25日前
三菱電機株式会社
半導体装置
11日前
三菱電機株式会社
半導体装置
11日前
三菱電機株式会社
電気接続部
1か月前
三菱電機株式会社
半導体装置
26日前
三菱電機株式会社
飛しょう体
1か月前
三菱電機株式会社
半導体装置
28日前
三菱電機株式会社
半導体装置
1か月前
三菱電機株式会社
電気掃除機
5日前
三菱電機株式会社
加熱調理器
1か月前
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
半導体装置
今日
三菱電機株式会社
電気掃除機
2か月前
三菱電機株式会社
回路遮断器
14日前
三菱電機株式会社
加熱調理器
28日前
三菱電機株式会社
半導体装置
28日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ