TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025075502
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186721
出願日
2023-10-31
発明の名称
搬送車
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250508BHJP(制御;調整)
要約
【課題】物体検知による停止後に走行の再開が可能な搬送車を提供すること。
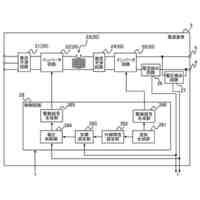
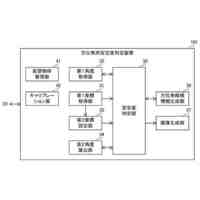
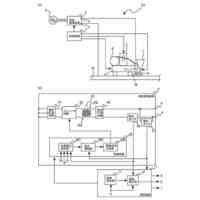
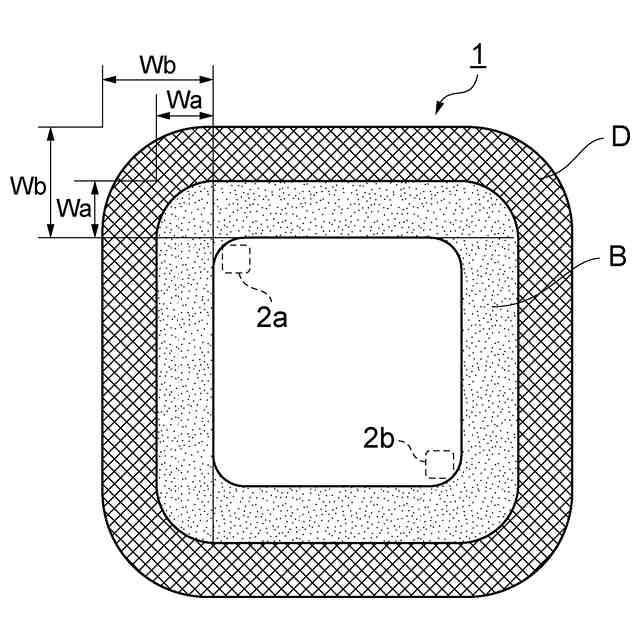
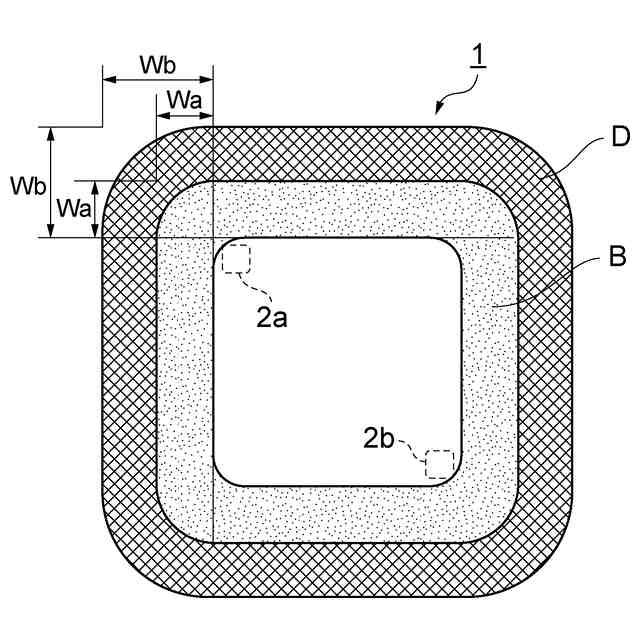
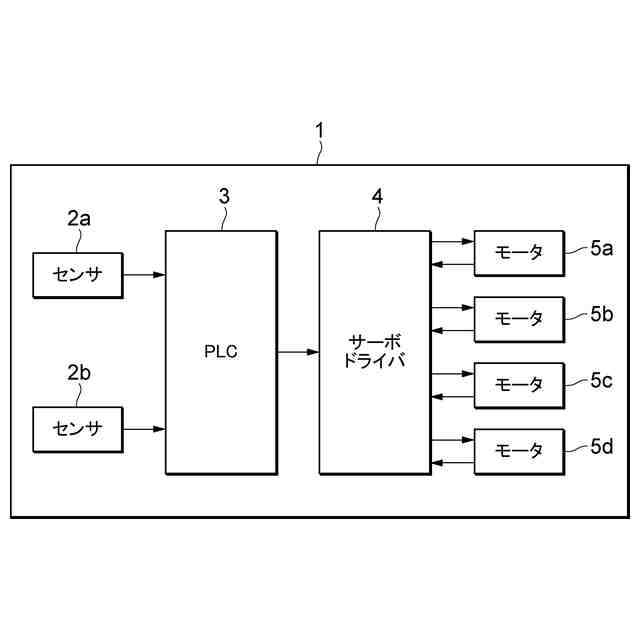
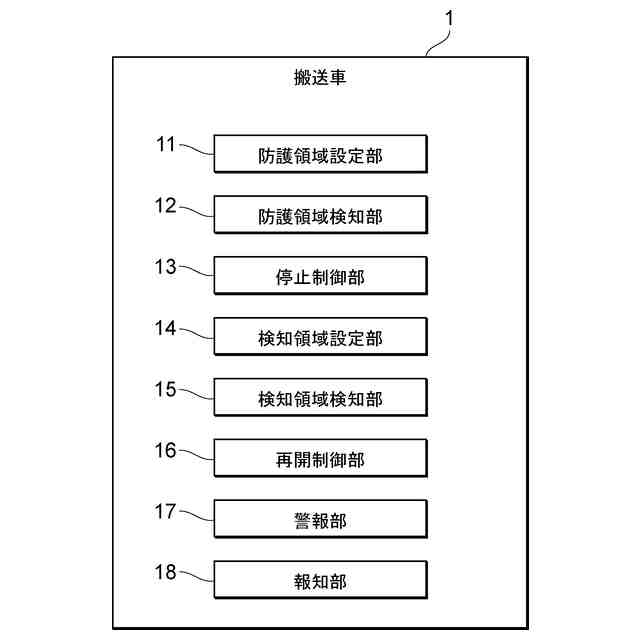
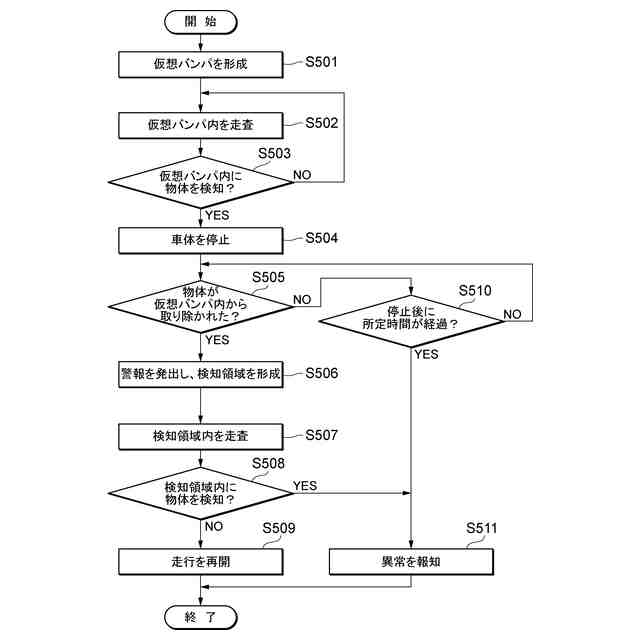
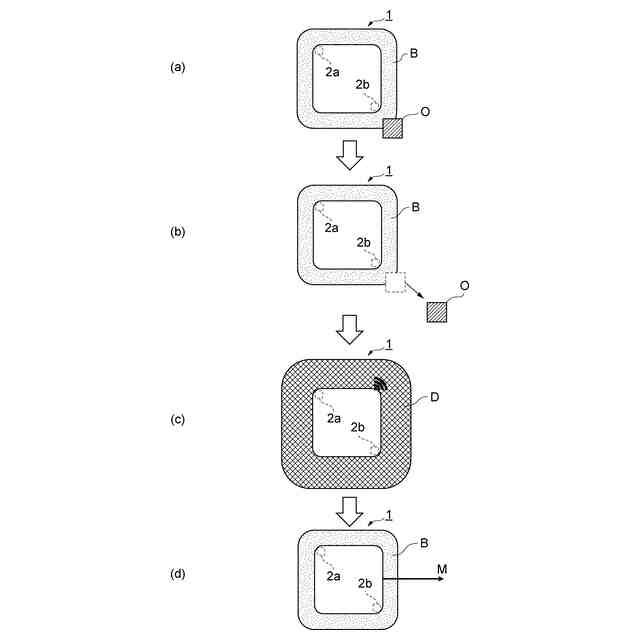
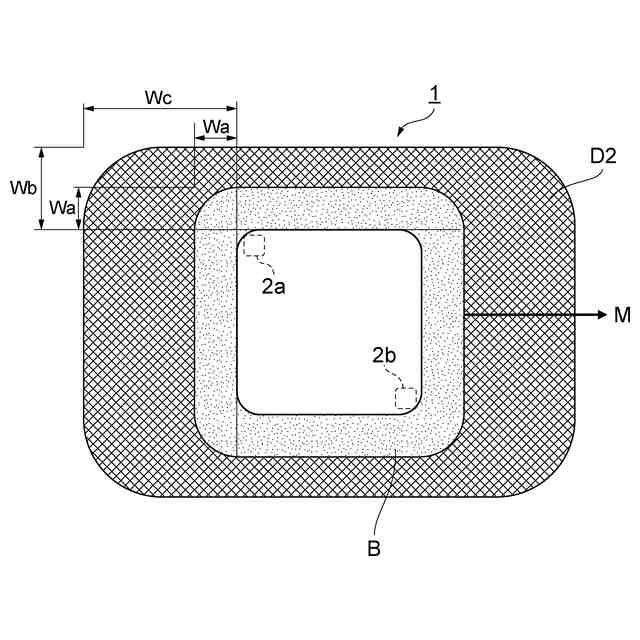
【解決手段】搬送車1は、車体の周囲に仮想バンパBを設ける防護領域設定部と、仮想バンパBの範囲内に存在する物体Oを検知する防護領域検知部と、仮想バンパBの範囲内に物体Oが検知された場合に、車体を停止させる停止制御部と、車体が停止した後に、車体の周囲に検知領域Dを設ける検知領域設定部と、検知領域Dに存在する物体を検知する検知領域検知部と、検知領域の範囲内に物体が検知されなかった場合に、車体の走行を再開させる再開制御部と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
車体の周囲に防護領域を設ける防護領域設定部と、
前記防護領域の範囲内に存在する第1物体を検知する防護領域検知部と、
前記防護領域の範囲内に前記第1物体が検知された場合に、前記車体を停止させる停止制御部と、
前記車体が停止した後に、前記車体の周囲に検知領域を設ける検知領域設定部と、
前記検知領域に存在する第2物体を検知する検知領域検知部と、
前記検知領域の範囲内に前記第2物体が検知されなかった場合に、前記車体の走行を再開させる再開制御部と、を備える搬送車。
続きを表示(約 290 文字)
【請求項2】
前記検知領域検知部は、前記第1物体が前記防護領域の範囲内から取り除かれた場合に、前記検知領域に存在する前記第2物体を検知する、請求項1に記載の搬送車。
【請求項3】
前記検知領域検知部が前記検知領域に存在する前記第2物体を検知している間、警報音を発する警報部、をさらに備える、請求項1に記載の搬送車。
【請求項4】
前記検知領域の範囲は、前記防護領域の範囲とは異なって設定される、請求項1に記載の搬送車。
【請求項5】
前記検知領域の範囲は前記搬送車の進行方向に基づいて設定される、請求項1に記載の搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行可能な搬送車に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
施設等で搬送作業を行う無人搬送車(AGV:Automatic Guided Vehicle)あるいは自律搬送車(AMR: Autonomous Mobile Vehicle)は、測距装置を用いて周囲の物体を検知しつつ走行を行う。特許文献1には、多数台のAGVが走行する場合に、各AGVの走行状態に基づいて監視領域を可変設定可能にするレーザセンサ及び自動搬送装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特許第6393523号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のように、自動搬送装置(自律搬送車)は、物体を検知したレーザセンサからの停止信号に基づいて停止する制御が行われる。移動が停止した自律搬送車は、管理者や作業者(以降、作業者とよぶ)による安全確認を経て、走行再開指示を作業者から受け付けることによって走行を再開する必要があった。しかし、走行再開指示を待つ間、自律搬送車は移動できず、搬送効率が低下してしまう。
【0005】
そこで、本発明は、物体検知による停止後に走行の再開が可能な搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の一態様による搬送車は、車体の周囲に防護領域を設ける防護領域設定部と、防護領域の範囲内に存在する第1物体を検知する防護領域検知部と、防護領域の範囲内に第1物体が検知された場合に、車体を停止させる停止制御部と、車体が停止した後に、車体の周囲に検知領域を設ける検知領域設定部と、検知領域に存在する第2物体を検知する検知領域検知部と、検知領域の範囲内に第2物体が検知されなかった場合に、車体の走行を再開させる再開制御部と、を備える。
【0007】
この態様によれば、防護領域の範囲内に第1物体が検知されると、車体が停止する。再開制御部は、検知領域検知部による検知によって第2物体が検知されなかった場合に車体の走行を再開させるので、物体検知による停止後に走行への自動復帰が可能となる。
【0008】
上記態様において、検知領域検知部は、第1物体が防護領域の範囲内から取り除かれた場合に、第2物体を検知してもよい。
【0009】
この態様によれば、検知領域検知部による第2物体の検知の前に、第1物体は防護領域の範囲内から取り除かれる。よって、車体の停止の原因となった第1物体への対処がなされた後に第2物体の検知及び走行再開の制御が行われるようになり、第1物体が防護領域内にあることによって走行の再開ができない事態を回避できる。
【0010】
上記態様において、検知領域検知部が検知領域に存在する第2物体を検知している間、警報音を発する警報部、をさらに備えてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
変圧器
9日前
株式会社ダイヘン
搬送装置
23日前
株式会社ダイヘン
溶接装置
19日前
株式会社ダイヘン
溶接装置
19日前
株式会社ダイヘン
溶接トーチ
18日前
株式会社ダイヘン
溶接トーチ
23日前
株式会社ダイヘン
溶接トーチ
19日前
株式会社ダイヘン
溶接トーチ
19日前
株式会社ダイヘン
直流電源回路
18日前
株式会社ダイヘン
固相接合装置
3日前
株式会社ダイヘン
溶接電源装置
1日前
株式会社ダイヘン
溶接電源装置
3日前
株式会社ダイヘン
高周波電源装置
9日前
株式会社ダイヘン
安定度向上装置
18日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイヘン
フラックス回収装置
17日前
株式会社ダイヘン
サブマージアーク溶接機
19日前
株式会社ダイヘン
サブマージアーク溶接機
17日前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
吸引ノズルおよびその製造方法
17日前
株式会社ダイヘン
固相接合装置および固相接合方法
3日前
株式会社ダイヘン
制御回路、および、蓄電池システム
3日前
株式会社ダイヘン
受電装置及びワイヤレス給電システム
1か月前
株式会社ダイヘン
集積構造体及びバッテリーパックの集積方法
9日前
株式会社ダイヘン
ベルト伝動機構およびこれを備えた搬送ロボット
23日前
株式会社ダイヘン
治具、および、プラズマ切断トーチの電極の寿命の確認方法
18日前
株式会社ダイヘン
サブマージアーク溶接システム、および、サブマージアーク溶接方法
19日前
株式会社FUJI
工作機械
1か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
8日前
ローム株式会社
半導体集積回路
1か月前
トヨタ自動車株式会社
ペダル機構
2か月前
三栄ハイテックス株式会社
基準電圧回路
1か月前
株式会社ダイフク
搬送設備
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ