TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025099796
公報種別
公開特許公報(A)
公開日
2025-07-03
出願番号
2023216730
出願日
2023-12-22
発明の名称
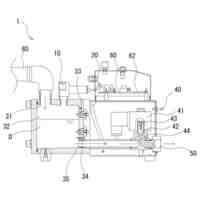
ベルト伝動機構およびこれを備えた搬送ロボット
出願人
株式会社ダイヘン
代理人
個人
,
個人
主分類
F16H
55/36 20060101AFI20250626BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】2つのプーリに対して巻き掛け方向を互いに逆にして取り付けられた2本のスチールベルトを備えて構成されたベルト伝動機構において、プーリの回転角度を拡大可能な構造を提供する。
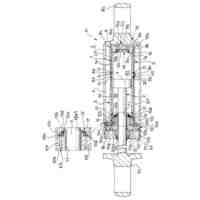
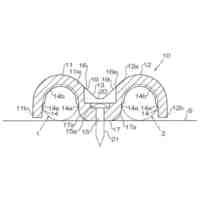
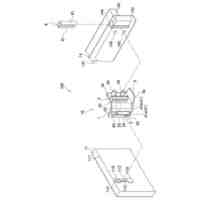
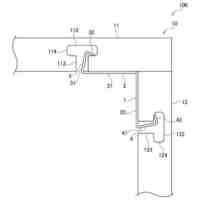
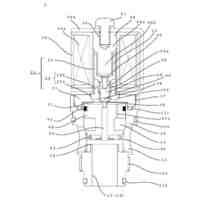
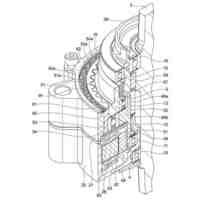
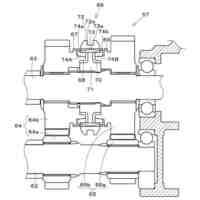
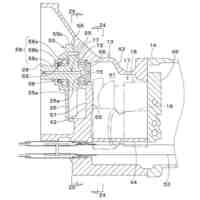
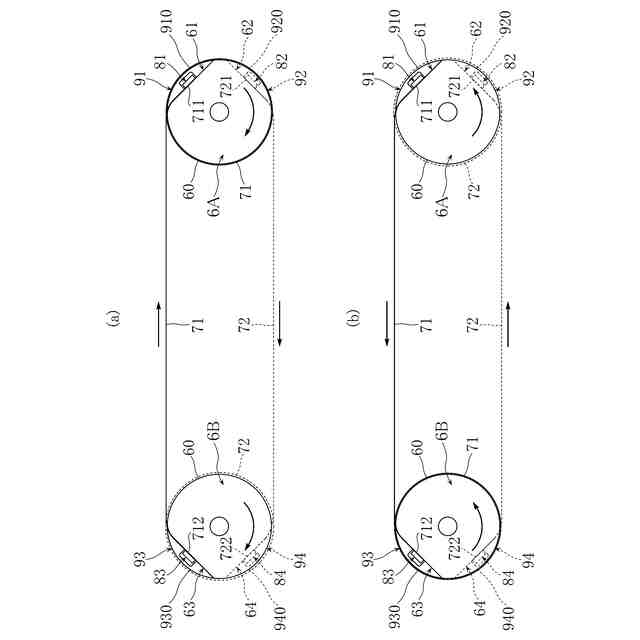
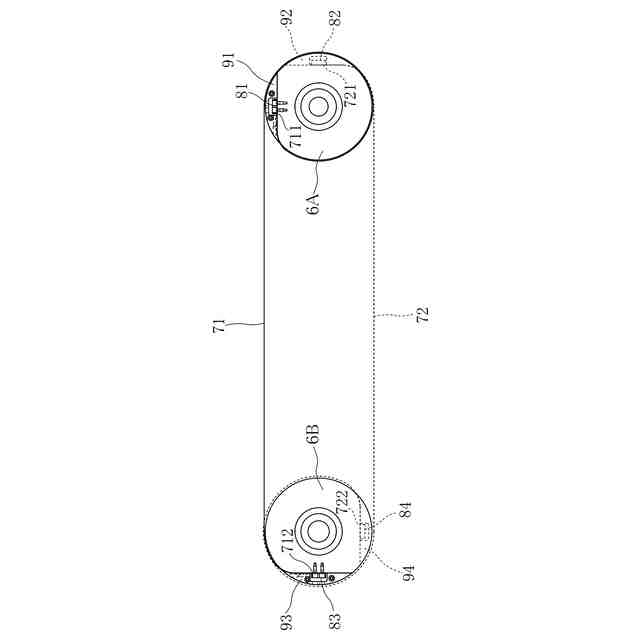
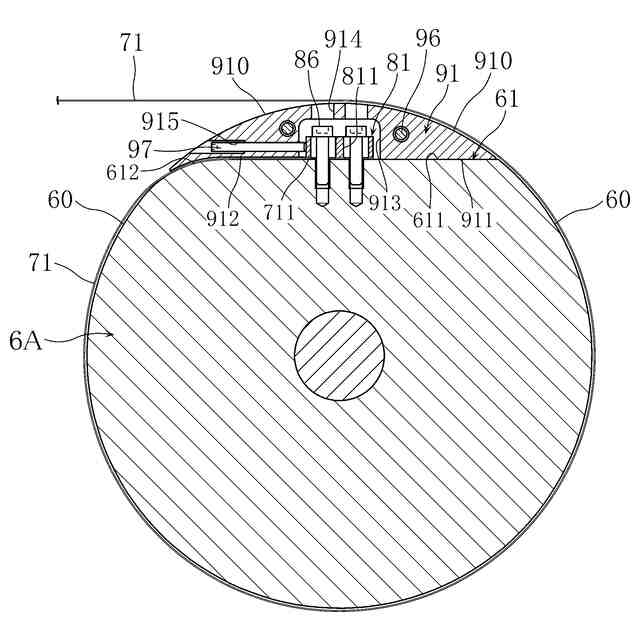
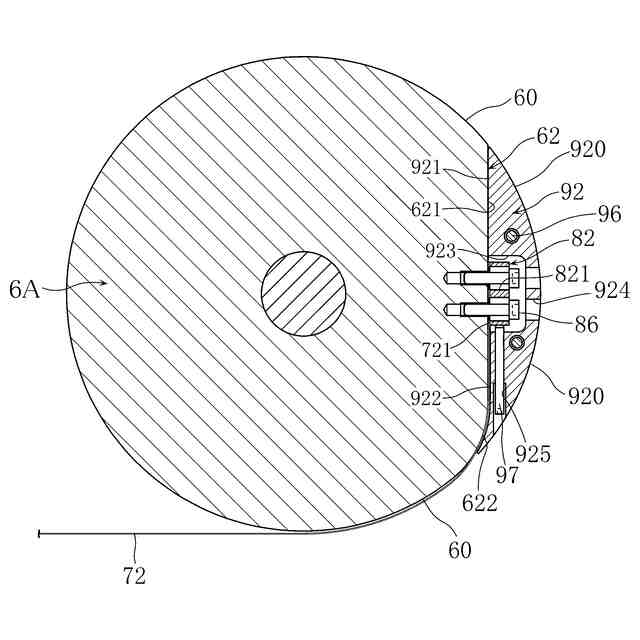
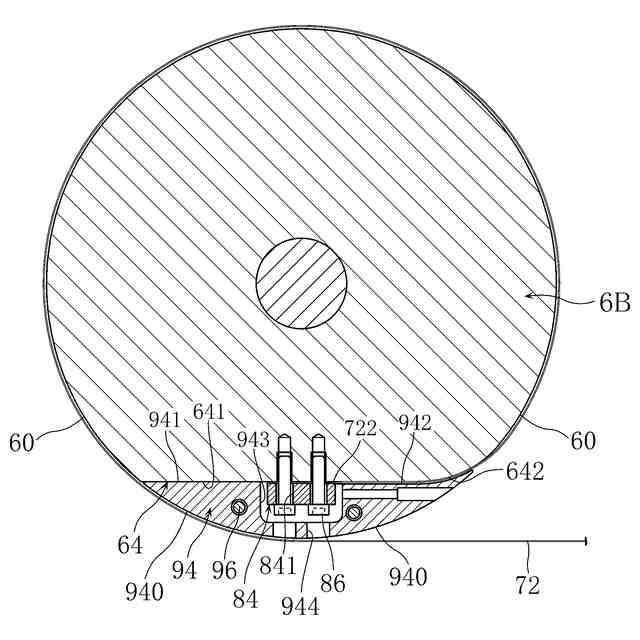
【解決手段】プーリ6A,6Bと、両端部711,712および両端部721,722を有するスチールベルト71,72と、カバー91,92と、を備え、プーリ6Aは、各々が外周面60から凹む凹部61,62を有する。端部711にはブロック部材81が固定され、ブロック部材81が凹部61に配置される。カバー91は、ブロック部材81を囲うように凹部61に固定配置され、プーリ6Aの外周面60と同一径の外周面910を有する。端部721にはブロック部材82が固定され、ブロック部材82が凹部62に配置される。カバー92は、ブロック部材82を囲うように凹部62に固定配置され、プーリ6Aの外周面60と同一径の外周面920を有する。
【選択図】図8
特許請求の範囲
【請求項1】
互いに平行な一対の軸線それぞれを中心として回転可能に配置された第1プーリおよび第2プーリと、
前記第1プーリに取り付けられた第1端部、および前記第2プーリに取り付けられた第2端部を有し、前記第1プーリおよび前記第2プーリに巻き掛けられた第1スチールベルトと、
前記第1プーリに取り付けられた第3端部、および前記第2プーリに取り付けられた第4端部を有し、且つ前記第1スチールベルトに対して前記第1プーリおよび前記第2プーリの軸線方向において離れて位置し、前記第1スチールベルトの巻き掛け方向とは反対となるように前記第1プーリおよび前記第2プーリに巻き掛けられた第2スチールベルトと、
第1カバーと、
第2カバーと、を備え、
前記第1プーリは、各々が外周面から凹む第1凹部および第2凹部を有し、
前記第1端部には第1ブロック部材が固定され、且つ当該第1ブロック部材が前記第1凹部に配置されており、
前記第1カバーは、前記第1ブロック部材を囲うように前記第1凹部に固定配置されるとともに、前記第1プーリの前記外周面と同一径の第1外周面を有し、
前記第3端部には第2ブロック部材が固定され、且つ当該第2ブロック部材が前記第2凹部に配置されており、
前記第2カバーは、前記第2ブロック部材を囲うように前記第2凹部に固定配置されるとともに、前記第1プーリの前記外周面と同一径の第2外周面を有する、ベルト伝動機構。
続きを表示(約 730 文字)
【請求項2】
第3カバーおよび第4カバーをさらに備え、
前記第2プーリは、各々が外周面から凹む第3凹部および第4凹部を有し、
前記第2端部には第3ブロック部材が固定され、且つ当該第3ブロック部材が前記第3凹部に配置されており、
前記第3カバーは、前記第3ブロック部材を囲うように前記第3凹部に固定配置されるとともに、前記第2プーリの前記外周面と同一径の第3外周面を有し、
前記第4端部には第4ブロック部材が固定され、且つ当該第4ブロック部材が前記第4凹部に配置されており、
前記第4カバーは、前記第4ブロック部材を囲うように前記第4凹部に固定配置されるとともに、前記第2プーリの前記外周面と同一径の第4外周面を有する、請求項1に記載のベルト伝動機構。
【請求項3】
前記第1カバーおよび前記第2カバーの少なくとも一方には、対応する前記第1ブロック部材または前記第2ブロック部材を前記第1プーリの周方向に向けて押圧可能なベルトテンション調整部が設けられている、請求項1に記載のベルト伝動機構。
【請求項4】
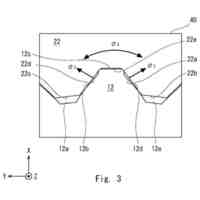
前記第1凹部は、前記第1スチールベルトと当接し、且つ前記第1プーリの前記外周面になだらかにつながる第1ガイド面を有し、
前記第2凹部は、前記第2スチールベルトと当接し、且つ前記第1プーリの前記外周面になだらかにつながる第2ガイド面を有する、請求項1に記載のベルト伝動機構。
【請求項5】
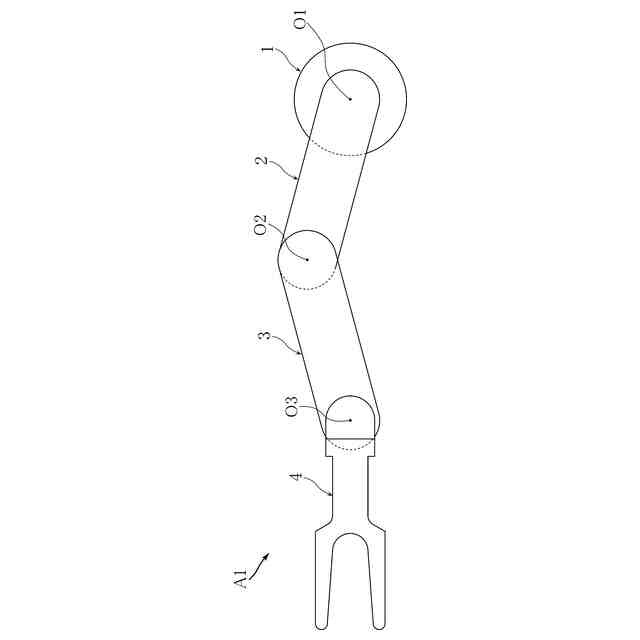
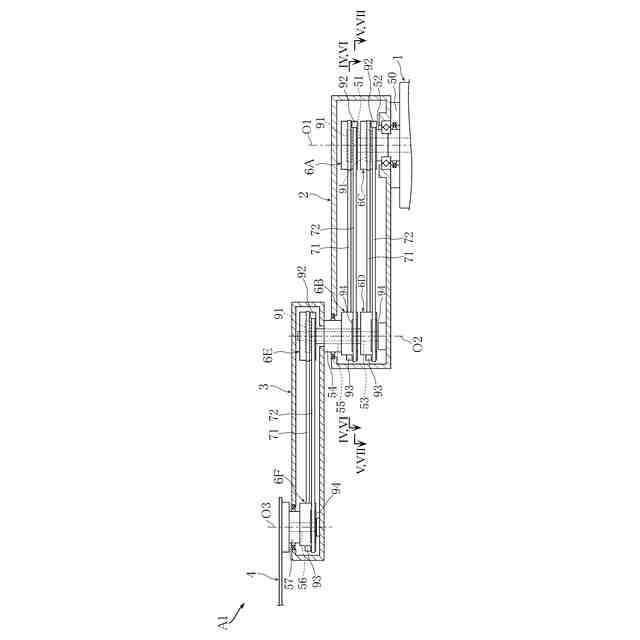
請求項1ないし4のいずれかに記載のベルト伝動機構と、当該ベルト伝動機構により回動させられるアームを有する水平多関節型のアーム機構と、を備えた、搬送ロボット。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ベルト伝動機構およびこれを備えた搬送ロボットに関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
搬送ロボットのうち、水平多関節型のアーム機構を備えたものがある。このような搬送ロボットとしては、たとえば下記の特許文献1に開示されたものがある。この搬送ロボットは、互いに回転可能に取り付けられたアームと、アームの端部に回転可能に取り付けられたハンド部と、を備えている。アームおよびハンド部は、ベルト伝動装置により回転駆動させられる。特許文献1においては、ベルト伝動装置を構成するベルトとして、金属製のスチールベルトが用いられている。スチールベルトは、たとえばゴム製のタイミングベルト等と比べて、発塵やアウトガスの放出などが少なく、スチールベルトを利用したベルト伝動装置は、真空環境に配置される搬送ロボットに装備するのに適する。
【0003】
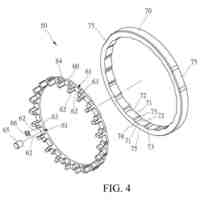
特許文献1に開示されたベルト伝動装置においては、2つのプーリ(駆動プーリと従動プーリ)に対して、2本のスチールベルトが設置されている。当該2本のスチールベルトは、それぞれ無端ベルトではなく、両端部を有する有端ベルトである。2本のスチールベルトは、2つのプーリに対して上下高さ違いに取り付けられている(同文献の図1参照)。また、2本のスチールベルトは、2つのプーリに対して巻き掛け方向を互いに逆にして取り付けられている(同文献の図2参照)。このように2本の有端ベルトを取り付けることで、プーリは、軸線周りの両方の回転方向に回転させることができる。各スチールベルトの両端部は、プーリの外周面に沿った状態で圧入ピンやねじ部材などによりプーリに締結される。このような有端ベルトの両端部をプーリに締結する構成のベルト伝動装置においては、無端ベルトと比べて位置決め精度が良く、プーリに対する位置ずれを抑制することができる。
【0004】
しかしながら、上記従来のベルト伝動機構においては、スチールベルト(有端ベルト)がプーリの外周上で重なることが許容されず、プーリの回転角度に制限がある。また、プーリに巻かれたベルトについて、当該ベルトの端の締結部との干渉を回避する必要があるため、プーリの回転角度がさらに制限されていた。
【先行技術文献】
【特許文献】
【0005】
特開2008-223974号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本開示は、このような事情のもとで考え出されたものであって、2つのプーリに対して巻き掛け方向を互いに逆にして取り付けられた2本のスチールベルトを備えて構成されたベルト伝動機構において、プーリの回転角度を拡大することが可能な構造を提供することを主たる課題とする。
【0007】
上記の課題を解決するため、本開示では、次の技術的手段を採用した。
【0008】
本開示の第1の側面によって提供されるベルト伝動機構は、互いに平行な一対の軸線それぞれを中心として回転可能に配置された第1プーリおよび第2プーリと、前記第1プーリに取り付けられた第1端部、および前記第2プーリに取り付けられた第2端部を有し、前記第1プーリおよび前記第2プーリに巻き掛けられた第1スチールベルトと、前記第1プーリに取り付けられた第3端部、および前記第2プーリに取り付けられた第4端部を有し、且つ前記第1スチールベルトに対して前記第1プーリおよび前記第2プーリの軸線方向において離れて位置し、前記第1スチールベルトの巻き掛け方向とは反対となるように前記第1プーリおよび前記第2プーリに巻き掛けられた第2スチールベルトと、第1カバーと、第2カバーと、を備え、前記第1プーリは、各々が外周面から凹む第1凹部および第2凹部を有し、前記第1端部には第1ブロック部材が固定され、且つ当該第1ブロック部材が前記第1凹部に配置されており、前記第1カバーは、前記第1ブロック部材を囲うように前記第1凹部に固定配置されるとともに、前記第1プーリの前記外周面と同一径の第1外周面を有し、前記第3端部には第2ブロック部材が固定され、且つ当該第2ブロック部材が前記第2凹部に配置されており、前記第2カバーは、前記第2ブロック部材を囲うように前記第2凹部に固定配置されるとともに、前記第1プーリの前記外周面と同一径の第2外周面を有する。
【0009】
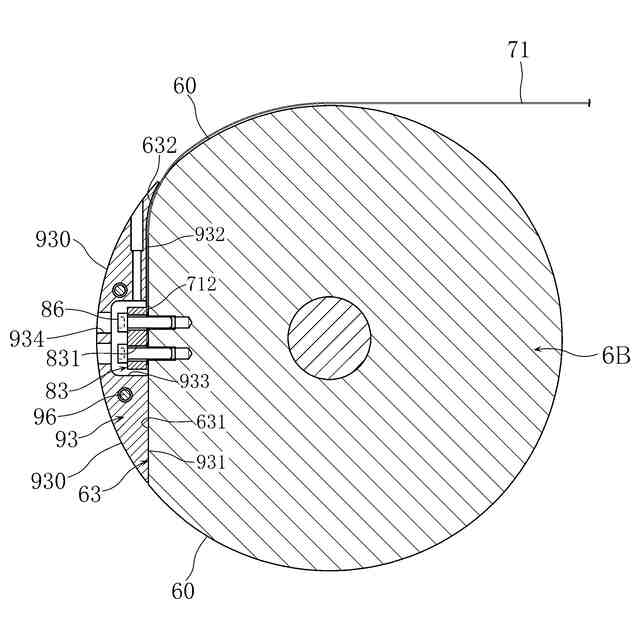
好ましい実施の形態においては、第3カバーおよび第4カバーをさらに備え、前記第2プーリは、各々が外周面から凹む第3凹部および第4凹部を有し、前記第2端部には第3ブロック部材が固定され、且つ当該第3ブロック部材が前記第3凹部に配置されており、前記第3カバーは、前記第3ブロック部材を囲うように前記第3凹部に固定配置されるとともに、前記第2プーリの前記外周面と同一径の第3外周面を有し、前記第4端部には第4ブロック部材が固定され、且つ当該第4ブロック部材が前記第4凹部に配置されており、前記第4カバーは、前記第4ブロック部材を囲うように前記第4凹部に固定配置されるとともに、前記第2プーリの前記外周面と同一径の第4外周面を有する。
【0010】
好ましい実施の形態においては、前記第1カバーおよび前記第2カバーの少なくとも一方には、対応する前記第1ブロック部材または前記第2ブロック部材を前記第1プーリの周方向に向けて押圧可能なベルトテンション調整部が設けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
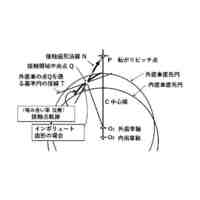
差動歯車用歯形
29日前
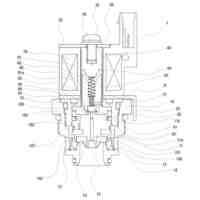
株式会社不二工機
電磁弁
23日前
個人
地震の揺れ回避装置
1日前
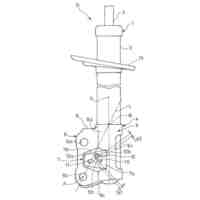
カヤバ株式会社
緩衝器
18日前
カヤバ株式会社
ダンパ
1か月前
カヤバ株式会社
ダンパ
1か月前
カヤバ株式会社
緩衝器
18日前
井関農機株式会社
作業車両
23日前
株式会社有恒商会
伸縮継手
17日前
個人
ワンウェイベアリング
11日前
株式会社オンダ製作所
長尺体保持具
22日前
株式会社ブリヂストン
管継手
1か月前
株式会社オンダ製作所
長尺体保持具
17日前
前澤工業株式会社
弁箱
29日前
トヨタ自動車株式会社
軸部材
1か月前
株式会社ダンレイ
圧力逃がし弁
22日前
THK株式会社
曲線ガイド
2日前
株式会社豊田自動織機
チェーン伝動装置
29日前
株式会社アイシン
流路部材
1か月前
株式会社フクハラ
ドレン排出装置
17日前
大和ハウス工業株式会社
締結部材
17日前
株式会社フクハラ
ドレントラップ
1か月前
クリナップ株式会社
接合部材
17日前
クリナップ株式会社
接合部材
17日前
株式会社不二工機
電磁弁及びその製造方法
29日前
NTN株式会社
焼結合金軸受
15日前
株式会社クボタ
作業車
1か月前
株式会社はちみつクリエイト
連結環
1か月前
未来工業株式会社
板状体の連結構造
25日前
FKS株式会社
配管接続構造
1か月前
株式会社クボタ
作業車
1か月前
ミネベアミツミ株式会社
減速機
8日前
日本精工株式会社
樹脂巻き転がり軸受
1か月前
NTN株式会社
軸シール
23日前
株式会社クボタ
作業車両
22日前
株式会社クボタ
作業車両
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ