TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025093792
公報種別
公開特許公報(A)
公開日
2025-06-24
出願番号
2023209668
出願日
2023-12-12
発明の名称
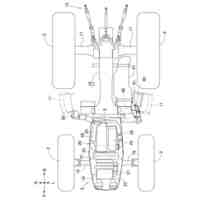
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
F16H
61/42 20100101AFI20250617BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】静油圧式無段変速装置のトラニオン軸を電動モータにより常に適正に回動操作することが可能な作業車が要望されていた。
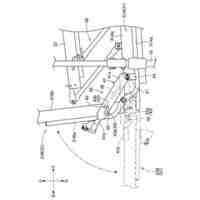
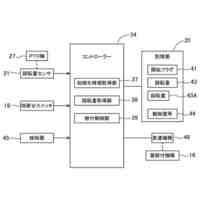
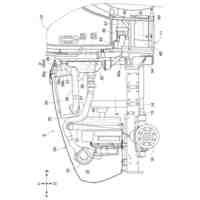
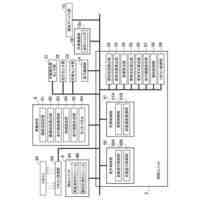
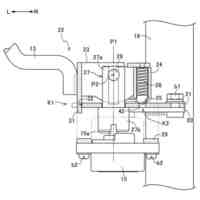
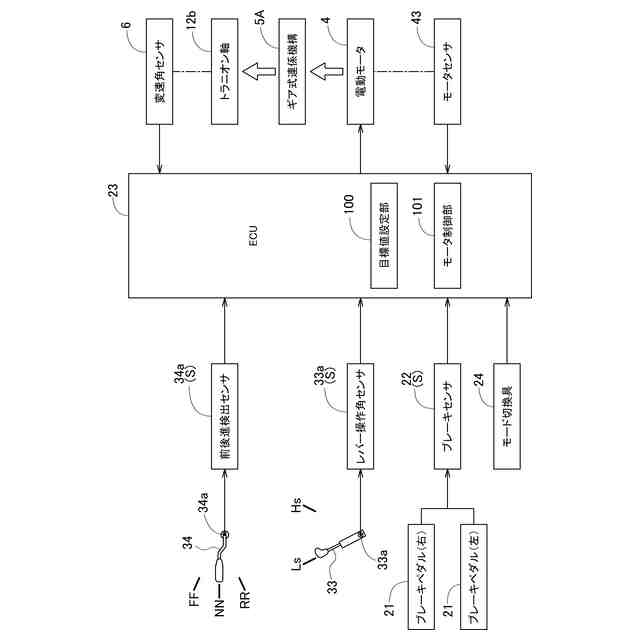
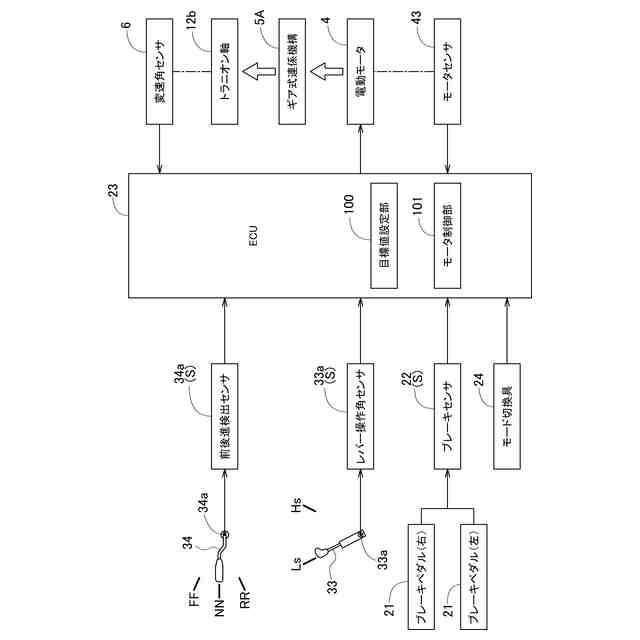
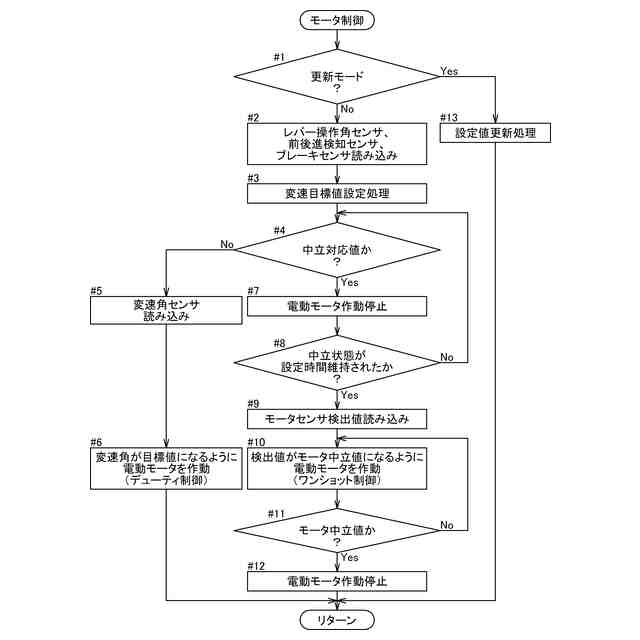
【解決手段】変速操作用の電動モータ4の出力軸と静油圧式無段変速装置のトラニオン軸12bとを連係するギア噛み合い式の連係機構5Aと、トラニオン軸12bの回動角を検出する変速角センサ6と、出力軸の回動角を検出するモータセンサ43と、電動モータ4の作動を制御する制御装置101と、が備えられ、制御装置101は、変速角センサ6にて検出されるトラニオン軸12bの回動角が変速目標値になるように電動モータ4を制御する第一制御状態と、モータセンサ43にて検出される出力軸の回動角が予め設定された設定値になるように電動モータ4を制御する第二制御状態と、に切り換え可能である。
【選択図】図7
特許請求の範囲
【請求項1】
動力出力用の静油圧式無段変速装置と、
変速操作用の電動モータと、
前記電動モータの出力軸と前記静油圧式無段変速装置のトラニオン軸とを連係するギア噛み合い式の連係機構と、
前記トラニオン軸の回動角を検出する変速角センサと、
前記出力軸の回動角を検出するモータセンサと、
前記電動モータの作動を制御する制御装置と、
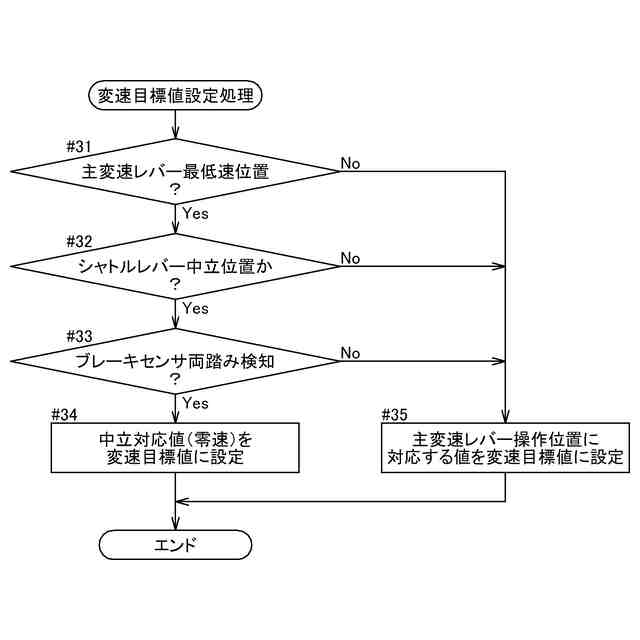
操作具が受け付けた人為操作に応じて前記静油圧式無段変速装置の変速目標値を設定する目標値設定部と、が備えられ、
前記制御装置は、
前記変速角センサにて検出される前記トラニオン軸の回動角が前記変速目標値になるように前記電動モータを制御する第一制御状態と、
前記モータセンサにて検出される前記出力軸の回動角が予め設定された設定値になるように前記電動モータを制御する第二制御状態と、に切り換え可能である作業車。
続きを表示(約 630 文字)
【請求項2】
前記制御装置は、前記変速目標値が中立対応値でないときは前記第一制御状態に切り換わり、前記変速目標値が前記中立対応値であるときは前記第二制御状態に切り換わる請求項1に記載の作業車。
【請求項3】
前記制御装置は、前記第二制御状態において、前記出力軸の回動角が設定時間毎に設定単位角ずつ変化するように前記電動モータの作動を制御する請求項1に記載の作業車。
【請求項4】
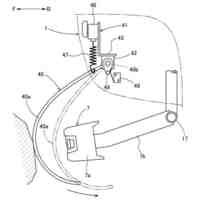
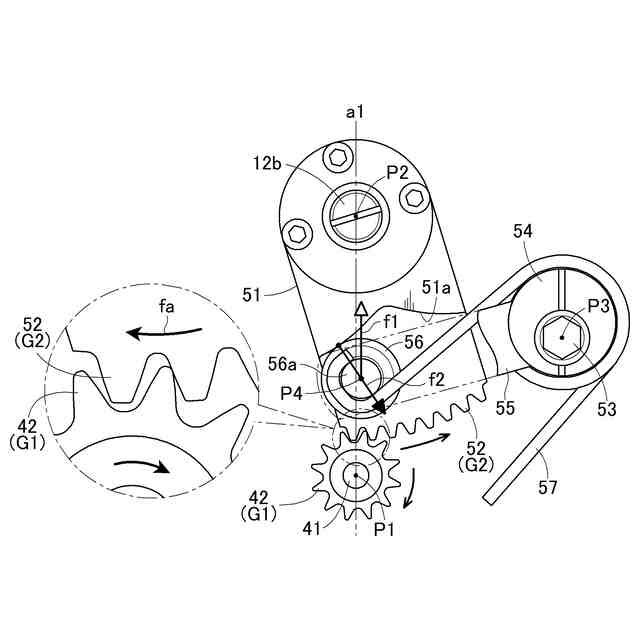
前記トラニオン軸を中立位置に向けて戻るように回動付勢する付勢機構が備えられ、
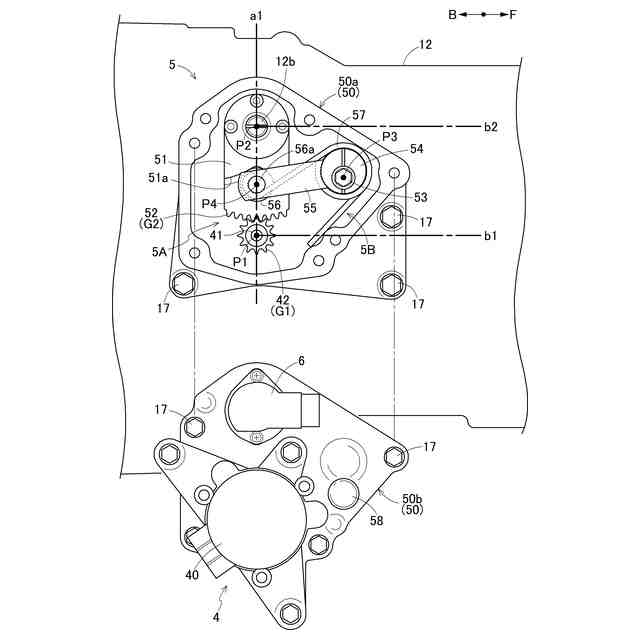
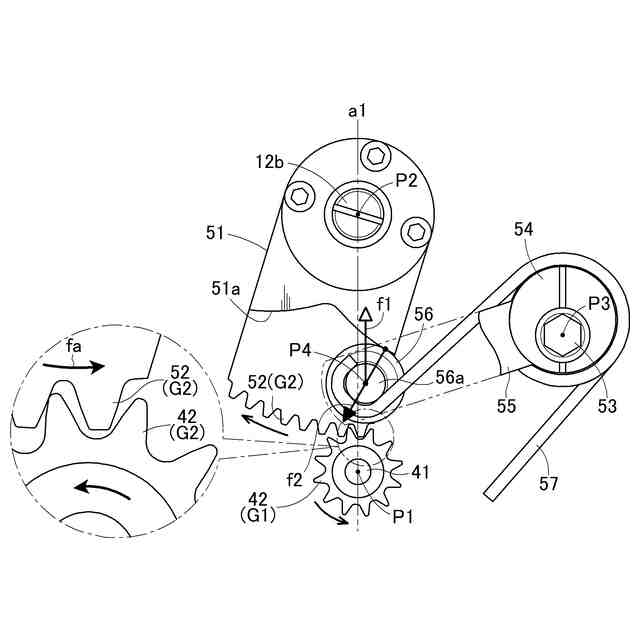
前記連係機構は、前記出力軸に設けられた駆動ギアと、前記トラニオン軸に設けられた従動ギアとが噛み合い連動するように構成され、
前記トラニオン軸が前記中立位置でないときは、前記付勢機構により、前記従動ギアが前記駆動ギアの回転方向とは逆の回転方向において歯面同士が接当するよう押し付け付勢される請求項1から3のいずれか一項に記載の作業車。
【請求項5】
前記付勢機構に、カムを有しかつ前記トラニオン軸と一体に揺動する揺動アームと、カムフォロアを有しかつ前記トラニオン軸の軸心と平行な軸心回りで揺動作動する操作体と、前記カムフォロアを前記カムに向けて付勢する付勢バネと、が備えられ、
前記付勢バネ及び前記カムフォロアによる前記カムへの押圧作用に伴って前記揺動アームが、前記中立位置に戻る方向に揺動付勢される請求項4に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
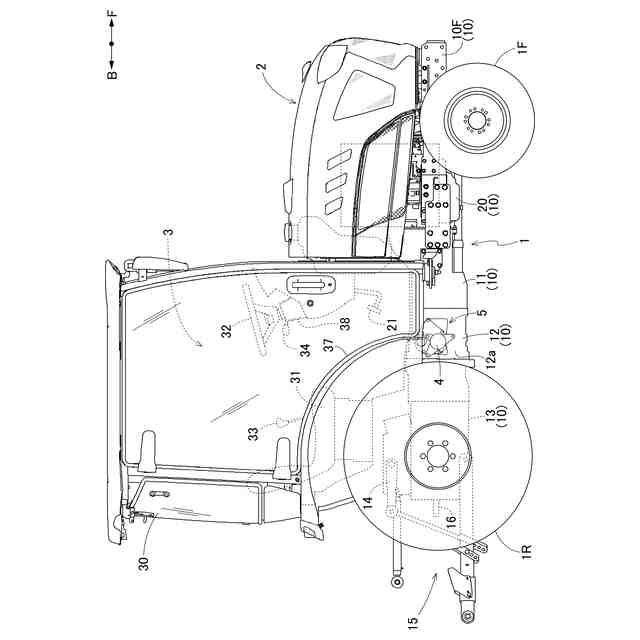
本発明は、静油圧式無段変速装置のトラニオン軸を電動モータで操作するようにした作業車に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
この種の作業車として、従来では、電動モータの出力軸と静油圧式無段変速装置のトラニオン軸とをギア噛み合い式の連係機構を介して連動連係し、トラニオン軸の回動角を検出する変速角センサの検出値が主変速レバーの操作にて設定される目標値になるように電動モータを制御するように構成されていた(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-095653号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
静油圧式無段変速装置の斜板の角度とトラニオン軸の回動角とは一対一で対応しており、変速状態を精密に制御するにはトラニオン軸の回動角を精密に制御する必要がある。例えば、静油圧式無段変速装置を中立状態へ制御するには、非常に狭い範囲にトラニオン軸を停止させる必要がある。上記の従来技術のように、電動モータの制御を変位角センサの検出値に基づいて行う形態には、改善の余地がある。
【0005】
本発明の目的は、静油圧式無段変速装置のトラニオン軸を電動モータにより適切に回動操作することが可能な作業車を提供する点にある。
【課題を解決するための手段】
【0006】
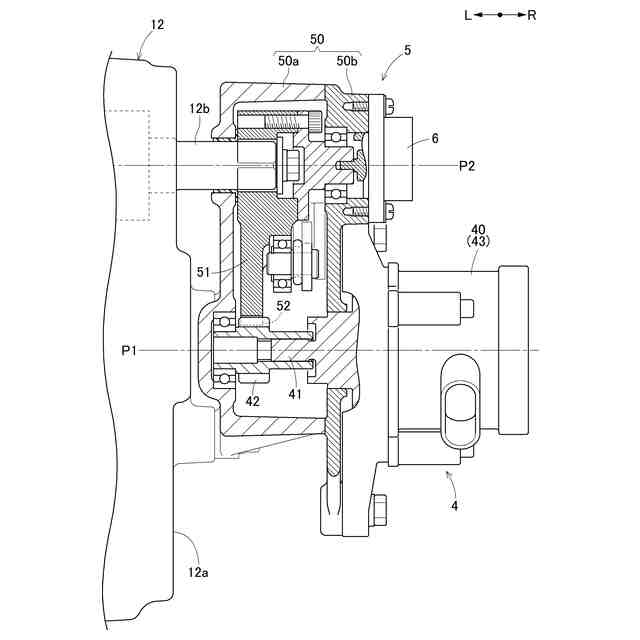
本発明に係る作業車の特徴構成は、動力出力用の静油圧式無段変速装置と、変速操作用の電動モータと、前記電動モータの出力軸と前記静油圧式無段変速装置のトラニオン軸とを連係するギア噛み合い式の連係機構と、前記トラニオン軸の回動角を検出する変速角センサと、前記出力軸の回動角を検出するモータセンサと、前記電動モータの作動を制御する制御装置と、操作具が受け付けた人為操作に応じて前記静油圧式無段変速装置の変速目標値を設定する目標値設定部と、が備えられ、前記制御装置は、前記変速角センサにて検出される前記トラニオン軸の回動角が前記変速目標値になるように前記電動モータを制御する第一制御状態と、前記モータセンサにて検出される前記出力軸の回動角が予め設定された設定値になるように前記電動モータを制御する第二制御状態と、に切り換え可能である点にある。
【0007】
本発明によれば、電動モータを制御する制御装置を、変速角センサにて検出されるトラニオン軸の回動角に基づく制御を行う第一制御状態と、モータセンサにて検出される出力軸の回動角に基づく制御を行う第二制御状態と、に切り換えることができる。モータの出力軸とトラニオン軸とはギア噛み合い式の連係機構で連係されており、モータの出力軸の回動量は、それに対応するトラニオン軸の回動量よりも大きい。従って第二制御状態によれば、第一制御状態よりも精密なトラニオン軸の制御が可能となる。換言すれば、トラニオン軸の精密な制御が必要な際に第二制御状態に切り換えれば、常に第一制御状態を用いる場合に比べて、制御の安定度(余裕度)の増加や、制御目標値への素早い移行が可能となる。
【0008】
従って、静油圧式無段変速装置のトラニオン軸を電動モータにより適切に回動操作することが可能な作業車を提供できるに至った。
【0009】
本発明においては、前記制御装置は、前記変速目標値が中立対応値でないときは前記第一制御状態に切り換わり、前記変速目標値が前記中立対応値であるときは前記第二制御状態に切り換わると好適である。
【0010】
静油圧式無段変速装置が中立状態となるトラニオン軸の角度範囲は非常に小さいため、中立状態への制御を第一制御状態で行うと、制御が不安定になったり、安定まで時間を要したりする場合がある。本構成では、変速目標値が中立対応値であるときは第二制御状態にて制御するので、中立状態への制御が容易になる。また、静油圧式無段変速装置は中立側への戻り付勢力が作用する上に、ギア噛み合い式の連係機構のバックラッシュが存在するため、電動モータの出力軸の回動位置の許容範囲が比較的大きくなる。従って、静油圧式無段変速装置のトラニオン軸の電動モータによる回動が更に適切に行われる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
田植機
15日前
株式会社クボタ
作業車
15日前
株式会社クボタ
作業車
21日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
田植機
18日前
株式会社クボタ
作業車
15日前
株式会社クボタ
田植機
15日前
株式会社クボタ
作業機
4日前
株式会社クボタ
作業機
14日前
株式会社クボタ
作業車
14日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
トラクタ
1か月前
株式会社クボタケミックス
伸縮継手
27日前
株式会社クボタ
圃場作業車
15日前
株式会社クボタ
圃場作業車
13日前
株式会社クボタ
圃場作業機
1か月前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
サトウキビ収穫機
14日前
株式会社クボタ
操作機構及び作業車
15日前
株式会社クボタ
経路生成システムおよび作業機
15日前
株式会社クボタケミックス
管路更生工法および管更生部材
1か月前
株式会社クボタ
走行制御システムおよび田植機
14日前
株式会社クボタケミックス
管路更生工法および管更生部材
1か月前
株式会社クボタ
判定方法、判定システム、および判定プログラム
1か月前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業機
28日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ