TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130529
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027758
出願日
2024-02-27
発明の名称
経路生成システムおよび作業機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250901BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】機体が作業地を越境することが抑制される目標走行経路を生成することを目的とする。
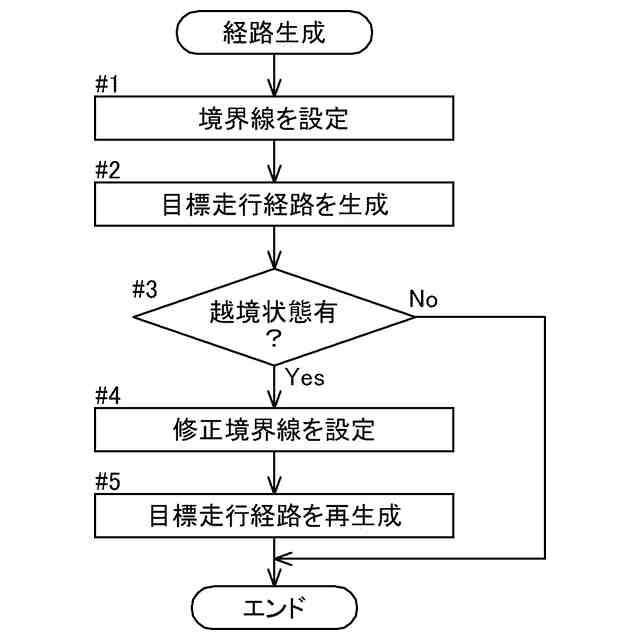
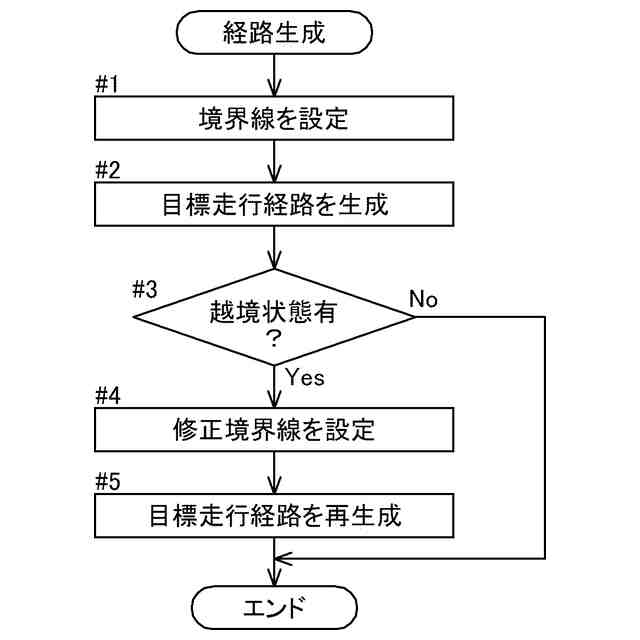
【解決手段】生成された目標走行経路上に機体が存在する場合に、制御点が越境線より作業地の中心から見て外側に位置する越境状態となる場合があるか否かを診断する(#3)越境診断部と、制御点が越境状態となる場合があると越境診断部が判定した場合に、境界線を作業地の内側に向けて退避距離だけ移動させて修正境界線を設定する(#4)境界線修正部とを備え、経路生成部は、修正境界線が設定されると、修正境界線に基づいて目標走行経路を修正または再生成する(#5)。
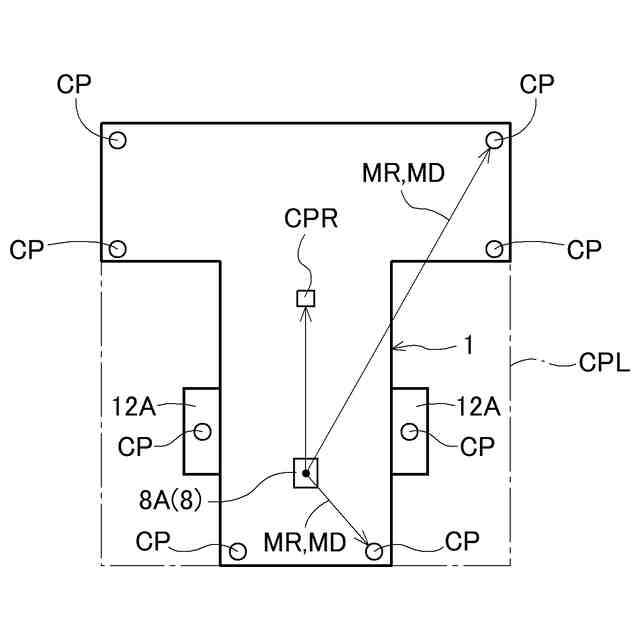
【選択図】図8
特許請求の範囲
【請求項1】
作業地を自動走行により作業走行する作業機が往復走行する際の目標走行経路を生成する経路生成システムであって、
前記作業地の外形形状に基づいて前記作業地の境界線を設定する境界線設定部と、
前記作業機の機体の位置に関する位置情報を算出する位置算出部と、
前記位置情報に基づいて前記機体の制御点を設定する制御点設定部と、
前記境界線に基づいて、前記自動走行により前記作業地内を走行する前記目標走行経路を生成する経路生成部と、
前記境界線に基づいて越境線を生成する越境線生成部と、
生成された前記目標走行経路上に前記機体が存在する場合に、前記制御点が前記越境線より前記作業地の中心から見て外側に位置する越境状態となる場合があるか否かを診断する越境診断部と、
前記制御点が前記越境状態となる場合があると前記越境診断部が判定した場合に、前記境界線を前記作業地の内側に向けて退避距離だけ移動させて修正境界線を設定する境界線修正部とを備え、
前記経路生成部は、前記修正境界線が設定されると、前記修正境界線に基づいて前記目標走行経路を修正または再生成する経路生成システム。
続きを表示(約 1,000 文字)
【請求項2】
前記目標走行経路は、互いに向かい合う2つの前記境界線間に設けられる作業走行経路、および、2つの前記作業走行経路を繋ぐ旋回経路を含む請求項1に記載の経路生成システム。
【請求項3】
前記境界線修正部は、前記作業走行経路の前記機体の進行方向における延長線と前記境界線とが成す角度に応じて、前記退避距離を自動的に決定する請求項2に記載の経路生成システム。
【請求項4】
前記退避距離の人為的な入力を受け付ける退避距離受付部をさらに備え、
前記境界線修正部は、前記退避距離受付部が受け付けた前記退避距離を用いて前記修正境界線を設定する請求項1に記載の経路生成システム。
【請求項5】
所定の情報を表示する表示部をさらに備え、
前記境界線修正部は、前記退避距離の推奨値を前記表示部に表示させる請求項4に記載の経路生成システム。
【請求項6】
所定の情報を表示する表示部をさらに備え、
前記越境診断部は、前記退避距離受付部が受け付けた前記退避距離を用いて生成された前記修正境界線に基づいて再生成された前記目標走行経路において、前記越境状態となる場合があるか否かを診断し、前記越境状態になる場合があると診断した場合、前記表示部に前記退避距離の再入力を促す表示を表示させる請求項4に記載の経路生成システム。
【請求項7】
前記作業地は前記往復走行により作業が行われる内部領域と前記内部領域の外側の外周領域とに区分けされ、
前記外周領域では前記作業地の外周辺に沿った周回走行が行われ、
前記周回走行の周回数が1周の場合に、前記越境診断部は、前記越境状態となる場合があるか否かを診断する請求項1に記載の経路生成システム。
【請求項8】
前記境界線修正部は、全ての前記境界線に対して前記修正境界線を設定する請求項1に記載の経路生成システム。
【請求項9】
前記修正境界線を設定する前記作業地の外周辺を選択する入力を受け付ける修正辺選択受付部をさらに備え、
前記境界線修正部は、選択された前記外周辺に対応する前記境界線に対して前記修正境界線を設定する請求項1に記載の経路生成システム。
【請求項10】
前記境界線修正部は、前記作業地の外周辺のうちの前記旋回経路が生成される旋回辺に対応する前記境界線に対して前記修正境界線を設定する請求項2に記載の経路生成システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動走行により作業走行する作業機、および、作業機が自動走行する目標走行経路を生成する経路生成システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
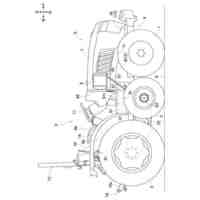
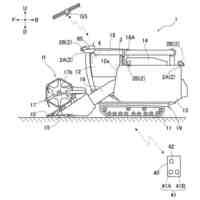
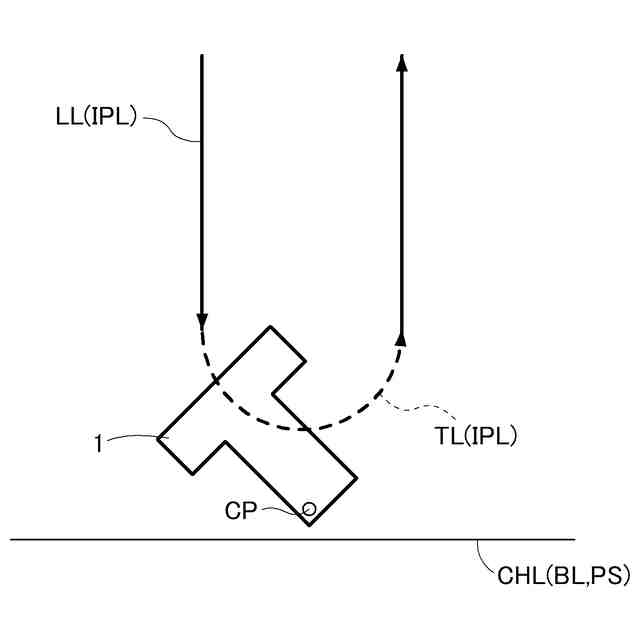
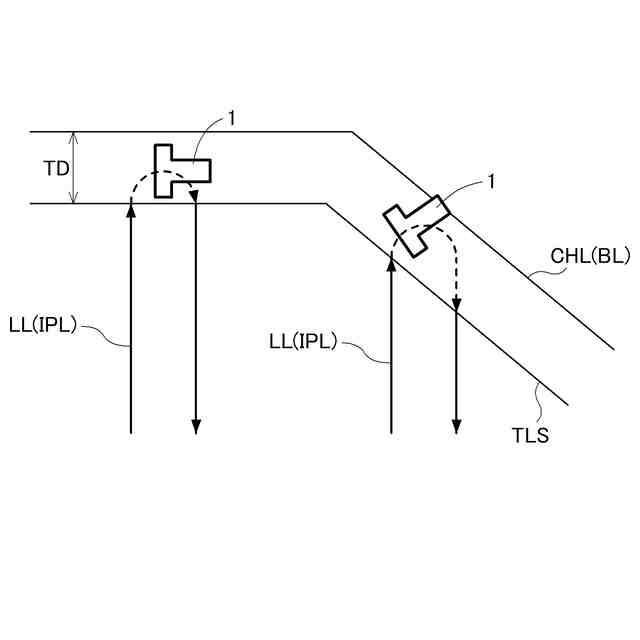
特許文献1に開示されるように、田植機(作業機)は、圃場面(作業地)を自走走行で往復走行しながら作業走行を行う。自動走行において、機体が作業地からはみ出さないように、作業地の外形形状に基づいて設定される越境ライン(越境線)を機体が超えないように制御される。往復走行は目標走行経路沿って自動走行で行われ、目標走行経路は内部領域に生成される直進経路(作業走行経路)と、主に外周領域に生成される旋回経路とを含む。目標走行経路は、作業地の外形形状(境界線)に基づいて生成される。また、目標走行経路は、機体が目標走行経路に沿って走行した際に、機体が越境線を超えない(越境しない)ように生成される。特に旋回経路は、機体の旋回性能や旋回領域(外周領域)の幅等に基づいて旋回開始位置が設定され、旋回走行の際に機体が越境しないように生成される。
【先行技術文献】
【特許文献】
【0003】
特開2023-155424号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、作業地が矩形状でない変形地である場合等に、目標走行経路に沿って機体が走行されても、機体が越境線を超えて機体が作業地を越境する場合がある。
【0005】
本発明は、機体が作業地を越境することが抑制される目標走行経路を生成することを目的とする。
【課題を解決するための手段】
【0006】
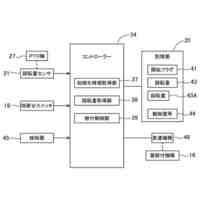
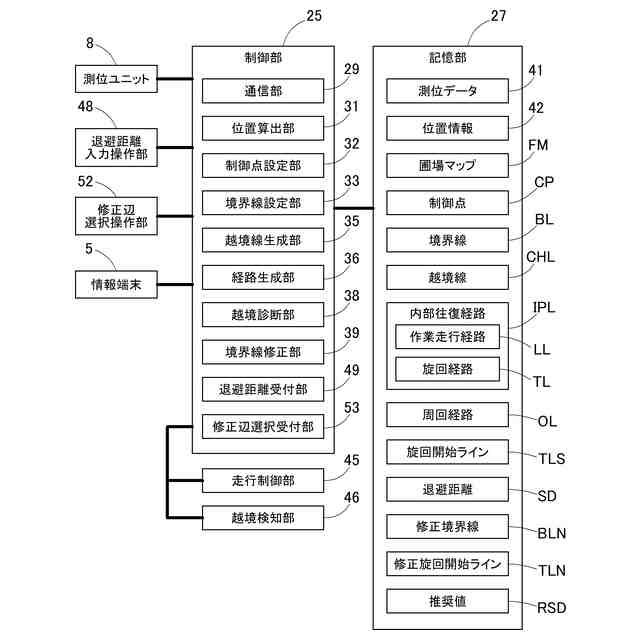
上記目的を達成するために、本発明の一実施形態に係る経路生成システムは、作業地を自動走行により作業走行する作業機が往復走行する際の目標走行経路を生成する経路生成システムであって、前記作業地の外形形状に基づいて前記作業地の境界線を設定する境界線設定部と、前記作業機の機体の位置に関する位置情報を算出する位置算出部と、前記位置情報に基づいて前記機体の制御点を設定する制御点設定部と、前記境界線に基づいて、前記自動走行により前記作業地内を走行する前記目標走行経路を生成する経路生成部と、前記境界線に基づいて越境線を生成する越境線生成部と、生成された前記目標走行経路上に前記機体が存在する場合に、前記制御点が前記越境線より前記作業地の中心から見て外側に位置する越境状態となる場合があるか否かを診断する越境診断部と、前記制御点が前記越境状態となる場合があると前記越境診断部が判定した場合に、前記境界線を前記作業地の内側に向けて退避距離だけ移動させて修正境界線を設定する境界線修正部とを備え、前記経路生成部は、前記修正境界線が設定されると、前記修正境界線に基づいて前記目標走行経路を修正または再生成する。
【0007】
作業地の外形形状によっては、機体が目標走行経路に沿って走行しても、機体が越境することを抑制することが困難である場合がある。
【0008】
上記構成によると、作業地の外形形状に応じて設定される境界線に基づいて目標走行経路を生成し、越境診断を行って越境状態となる場合がある目標走行経路である場合には、境界線を作業地の内側に退避距離だけ移動させて目標走行経路を再生成することができる。その結果、境界線の移動に伴って目標走行経路が作業地の内側に移動され、自動走行に伴って機体が作業地を越境することを抑制することができる。
【0009】
また、前記目標走行経路は、互いに向かい合う2つの前記境界線間に設けられる作業走行経路、および、2つの前記作業走行経路を繋ぐ旋回経路を含んでもよい。
【0010】
上記構成によると、作業地が矩形状である場合には作業走行経路の延長線と作業地の旋回辺とが概ね直交するのに対し、作業地が変形地である場合には旋回辺の作業走行経路の延長線に対する傾きが大きくなる場合がある。作業走行経路の延長線と旋回辺とが直交する場合には旋回辺(境界線)に対して所定の距離だけ離れた位置から旋回を開始すれば越境せずに旋回できるとしても、旋回辺の作業走行経路の延長線に対する傾きが大きな場合には旋回辺(境界線)に対して所定の距離だけ離れた位置から旋回を開始しても旋回の途中で機体が旋回辺に近づき越境してしまう場合がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタケミックス
管枕
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車
26日前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
作業車
今日
株式会社クボタ
移植機
2か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
収穫機
2か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業車
7日前
株式会社クボタ
移植機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
移植機
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
田植機
4日前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
田植機
2か月前
株式会社クボタ
作業機
2か月前
株式会社クボタ
作業車
2か月前
株式会社クボタ
作業機
今日
株式会社クボタ
収穫機
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ