TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025130532
公報種別
公開特許公報(A)
公開日
2025-09-08
出願番号
2024027761
出願日
2024-02-27
発明の名称
圃場作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
69/00 20060101AFI20250901BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】適切なタイミングで作業装置を下降位置に自動的に下降できる圃場作業車を提供する。
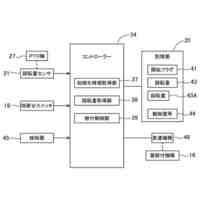
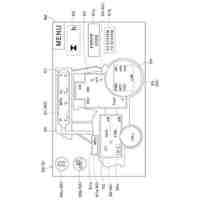
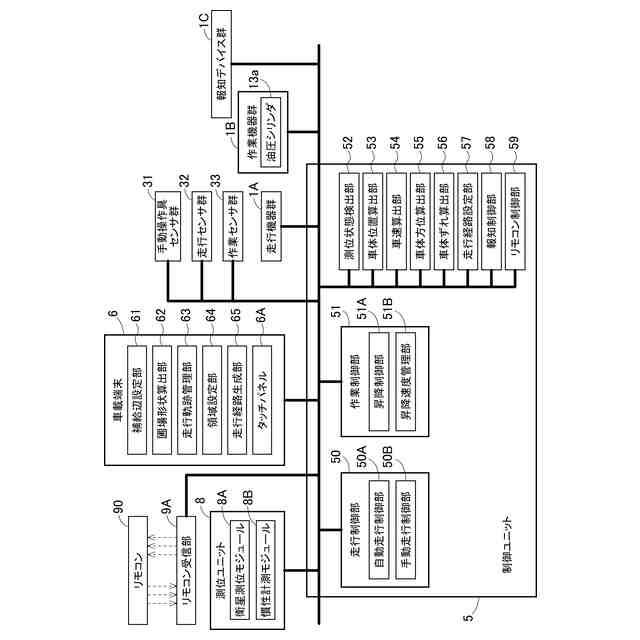
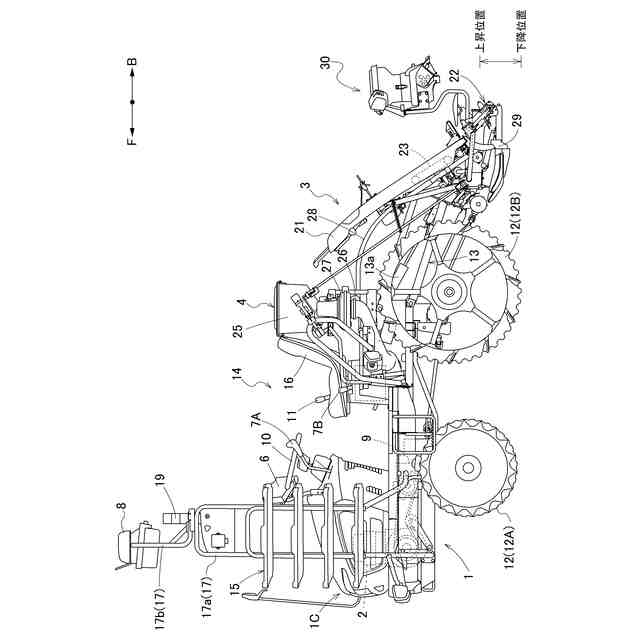
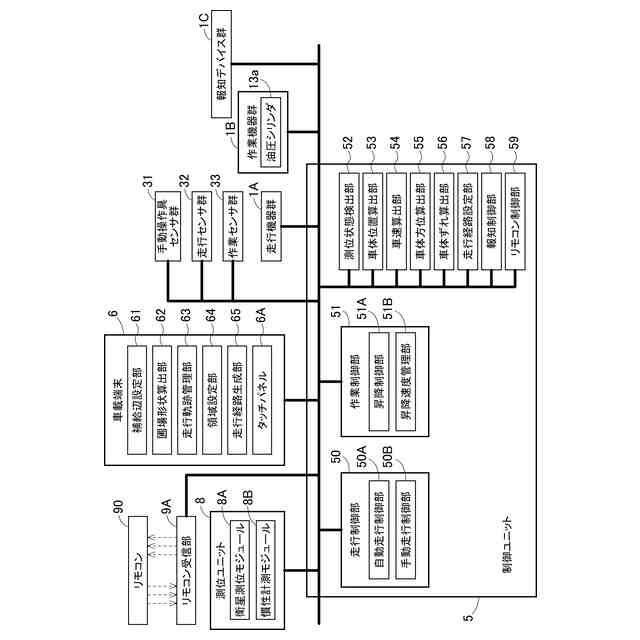
【解決手段】圃場作業車は、対地作業装置と、衛星測位モジュール8Aを有する測位ユニット8と、測位ユニット8からの測位データに基づいて車体位置を算出する車体位置算出部53と、車体位置に基づいて車速を算出する車速算出部54と、対地作業が可能となる下降位置と対地作業が不能となる上昇位置との間で対地作業装置を昇降させる昇降機構と、昇降機構を制御する昇降制御部51Aとを備え、昇降制御部51Aは、車速と対地作業の作業開始位置とに基づいて、対地作業装置が作業開始位置に達したときに対地作業装置が下降位置に達しているように、昇降機構による対地作業装置の下降位置への下降を制御する。
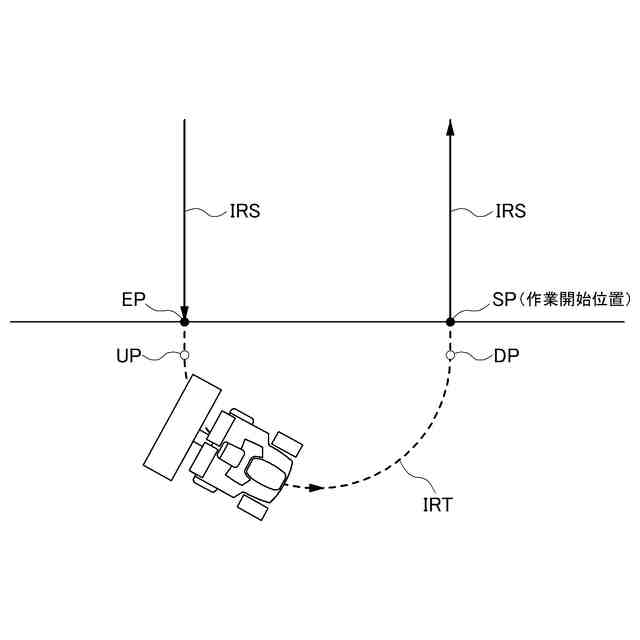
【選択図】図4
特許請求の範囲
【請求項1】
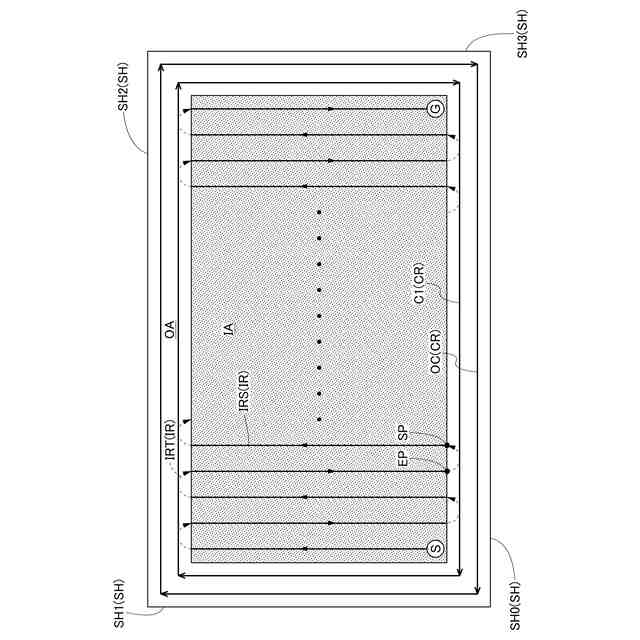
圃場に設定された内部経路に沿って対地作業を行う作業走行と前記内部経路をつなぐ旋回走行とを繰り返しながら圃場作業を行う圃場作業車であって、
車体に装備された対地作業装置と、
衛星測位モジュールを有する測位ユニットと、
前記測位ユニットからの測位データに基づいて車体位置を算出する車体位置算出部と、
前記車体位置に基づいて車速を算出する車速算出部と、
前記対地作業が可能となる下降位置と前記対地作業が不能となる上昇位置との間で前記対地作業装置を昇降させる昇降機構と、
前記昇降機構を制御する昇降制御部と、を備え、
前記昇降制御部は、少なくとも前記車速と前記対地作業の作業開始位置とに基づいて、前記対地作業装置が前記作業開始位置に達したときに前記対地作業装置が前記下降位置に達しているように、前記昇降機構による前記対地作業装置の前記下降位置への下降を制御する圃場作業車。
続きを表示(約 730 文字)
【請求項2】
前記昇降制御部は、作業終了位置又は旋回開始位置に基づいて、前記対地作業装置が前記作業開始位置に達しているように、前記昇降機構による前記対地作業装置の前記下降位置への下降を制御する請求項1に記載の圃場作業車。
【請求項3】
前記昇降制御部は、前記車体位置と前記車速と前記作業開始位置とに基づいて、前記対地作業装置の前記下降位置への下降を開始させる請求項1に記載の圃場作業車。
【請求項4】
車体方位を算出する車体方位算出部が備えられ、
前記昇降制御部は、前記車体方位と前記車速とに基づいて、前記対地作業装置の前記下降位置への下降を開始させる請求項1に記載の圃場作業車。
【請求項5】
前記昇降制御部は、前記車体方位と前記車速とに基づいて、前記対地作業装置の前記上昇位置への上昇を開始させる請求項4に記載の圃場作業車。
【請求項6】
前記昇降機構による前記対地作業装置の下降速度を管理する昇降速度管理部が備えられ、
前記昇降制御部は、前記下降速度に応じて、前記下降位置への下降タイミングを調節する請求項1に記載の圃場作業車。
【請求項7】
前記測位ユニットの前記測位データの悪化を検知する測位状態検知部が備えられ、
前記昇降制御部は、前記測位データの悪化が検知された場合、前記対地作業装置の前記下降位置への下降を早める請求項1に記載の圃場作業車。
【請求項8】
前記車速算出部は、経時的に異なるタイミングで算出された複数の前記車速の平均値を有効な前記車速として出力する請求項1から7のいずれか一項に記載の圃場作業車。
発明の詳細な説明
【技術分野】
【0001】
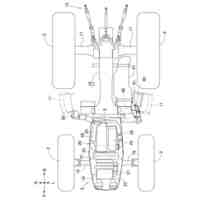
本発明は、圃場に設定された内部経路に沿って対地作業を行う作業走行と内部経路をつなぐ旋回走行とを繰り返しながら、圃場作業を行う圃場作業車に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
田植機などの圃場作業車では、対地作業装置を上昇位置に上昇させた状態で旋回した後、内部経路に沿った走行で圃場作業を行うためには、対地作業装置を上昇位置から下降位置に下降しなければならない。このため、特許文献1による作業車は、昇降自在に機体に備えられた作業装置を昇降駆動する駆動機構を備えている。この駆動機構は、直進状態から旋回状態に移行してからの機体の走行距離が設定距離に達すると、上昇状態の作業装置を地面まで自動的に下降させる。
【先行技術文献】
【特許文献】
【0003】
特開2002-233220号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1による作業車では、機体の走行距離に基づいて、上昇状態の作業装置を地面まで下降させるタイミングが決定されるが、この走行距離は、伝動軸の回転数を計測する距離センサのセンサ値に基づいて算出される。しかしながら、伝動軸の回転数から算出される走行距離は、車輪のスリップなどにより不正確になりがちであり、所望のタイミングで作業装置を下降位置に下降できない問題が生じうる。
【0005】
上記実情に鑑み、本発明の目的は、適切なタイミングで対地作業装置を下降位置に自動的に下降できる圃場作業車を提供することである。
【課題を解決するための手段】
【0006】
圃場に設定された内部経路に沿って対地作業を行う作業走行と前記内部経路をつなぐ旋回走行とを繰り返しながら圃場作業を行う、本発明による圃場作業車は、車体に装備された対地作業装置と、衛星測位モジュールを有する測位ユニットと、前記測位ユニットからの測位データに基づいて車体位置を算出する車体位置算出部と、前記車体位置に基づいて車速を算出する車速算出部と、前記対地作業が可能となる下降位置と前記対地作業が不能となる上昇位置との間で前記対地作業装置を昇降させる昇降機構と、前記昇降機構を制御する昇降制御部と、を備え、
前記昇降制御部は、少なくとも前記車速と前記対地作業の作業開始位置とに基づいて、前記対地作業装置が前記作業開始位置に達したときに前記対地作業装置が前記下降位置に達しているように、前記昇降機構による前記対地作業装置の前記下降位置への下降を制御する。
【0007】
この構成によれば、衛星測位(GNSS等)を用いて算出された車速を用いて、つまり、車輪などのスリップによる悪影響を受けることなしに、圃場作業車(つまり、対地作業装置)が作業開始位置に達したときには対地作業装置が下降位置に達するように、対地作業装置の下降位置への下降タイミングを決定することができる。
【0008】
対地作業の作業開始位置は、作業終了位置又は旋回開始位置から求めることができる。したがって、作業終了位置又は旋回開始位置に基づいて、昇降機構による対地作業装置の下降位置への下降制御を行うことも可能である。このことから、本発明の好適な実施形態の1つでは、前記昇降制御部は、作業終了位置又は旋回開始位置に基づいて、前記対地作業装置が前記作業開始位置に達しているように、前記昇降機構による前記対地作業装置の前記下降位置への下降を制御する。終了位置や旋回開始位置から作業開始位置までの移動距離が長かったり、短かったりする場合、車速を考慮して、昇降タイミングを調整するとよい。
【0009】
圃場作業車は、実質的には一定速度で走行している。したがって、正確な車速が得られるならば、車体位置と作業開始位置との間の距離から、当該車体位置の圃場作業車が作業開始位置に到達するまでの正確な時間が得られる。これにより、所望の自車位置で対地作業装置を下降位置とするための、対地作業装置の下降開始タイミングも正確に得られる。このことから、本発明の好適な実施形態の1つでは、前記昇降制御部は、前記車体位置と前記車速と前記作業開始位置とに基づいて、前記対地作業装置の前記下降位置への下降を開始させる。
【0010】
また、この圃場作業車では、走行し終えた内部経路(元走行経路)から、対地作業装置を上昇させた状態での旋回走行(通常180°旋回)を経て、対地作業装置を下降させた状態で次の内部経路(次走行経路)に進入して、対地作業を行う。したがって、旋回走行時の車体方位から旋回経路における機体位置が推定可能であり、この推定された機体位置に基づいて、所望の自車位置で対地作業装置を下降位置とするための、対地作業装置の下降開始タイミングも得られる。このことから、本発明の好適な実施形態の他の1つでは、車体方位を算出する車体方位算出部が備えられ、前記昇降制御部は、前記車体方位と前記車速とに基づいて、前記対地作業装置の前記下降位置への下降を開始させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社クボタ
作業車
今日
株式会社クボタ
作業車
2日前
株式会社クボタ
作業車
23日前
株式会社クボタ
田植機
23日前
株式会社クボタ
田植機
23日前
株式会社クボタ
作業車
23日前
株式会社クボタ
田植機
26日前
株式会社クボタ
作業車
29日前
株式会社クボタ
作業車
22日前
株式会社クボタ
作業機
12日前
株式会社クボタ
作業車
今日
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
22日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
作業車両
2日前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
作業車両
2日前
株式会社クボタ
トラクタ
1か月前
株式会社クボタ
作業車両
2日前
株式会社クボタケミックス
伸縮継手
1か月前
株式会社クボタ
圃場作業機
1か月前
株式会社クボタ
圃場作業車
21日前
株式会社クボタ
圃場作業車
23日前
株式会社クボタ
サトウキビ収穫機
22日前
株式会社クボタ
サトウキビ収穫機
22日前
株式会社クボタ
サトウキビ収穫機
22日前
株式会社クボタ
サトウキビ収穫機
22日前
株式会社クボタ
サトウキビ収穫機
22日前
株式会社クボタ
サトウキビ収穫機
22日前
株式会社クボタ
サトウキビ収穫機
22日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ