TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025098740
公報種別
公開特許公報(A)
公開日
2025-07-02
出願番号
2023215074
出願日
2023-12-20
発明の名称
作業車両
出願人
井関農機株式会社
代理人
個人
主分類
F16H
61/425 20100101AFI20250625BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】無段変速装置でのトルクが固定の構成に比べて、効率的な走行を可能にすること。
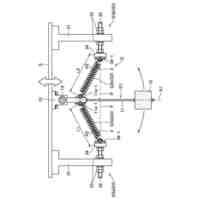
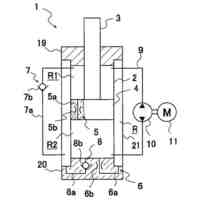
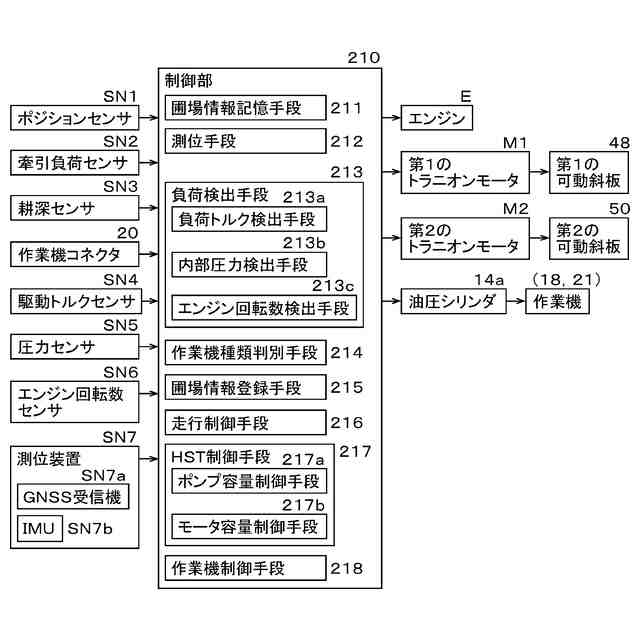
【解決手段】圃場において走行した際に負荷検出部材(SN4,SN5,SN6)が検出した走行負荷と測位装置(SN7)が計測した位置とを関連付けて記憶しておき、記憶された過去の走行時の走行負荷と位置とに基づいて、走行負荷が基準値よりも高い位置では、走行負荷が基準値よりも低い位置よりも油圧モータ(49)の容量を大きくすることで、無段変速装置でのトルクが固定の構成に比べて、効率的な走行を可能にすることができる。
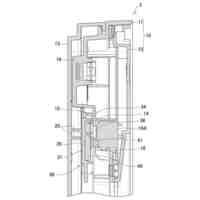
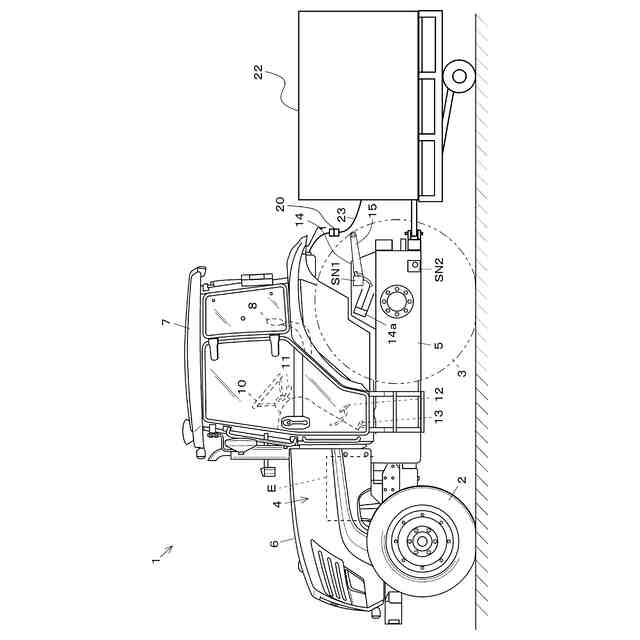
【選択図】図6
特許請求の範囲
【請求項1】
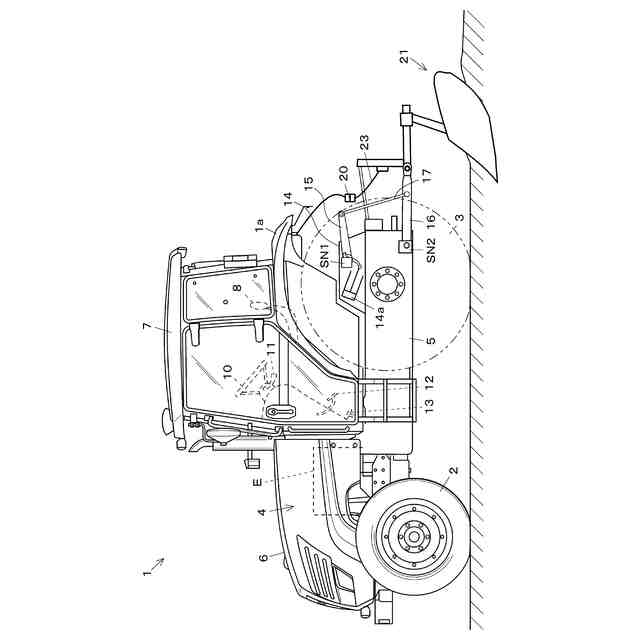
エンジン(E)を有する車体(1a)と、
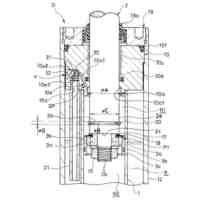
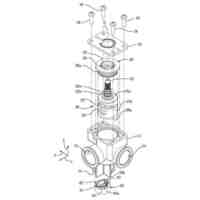
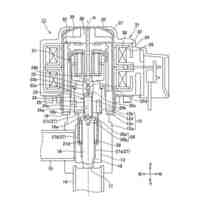
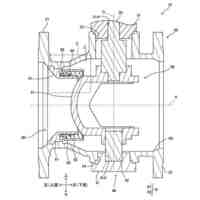
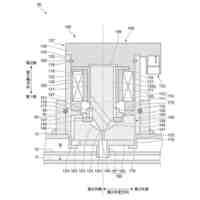
前記エンジン(E)からの入力軸(32a)に接続される可変容量型の油圧ポンプ(47)と、前記車体(1a)の駆動輪(2,3)への出力軸(32b)に接続される可変容量型の油圧モータ(49)とを有し、前記入力軸(32a)から出力軸(32b)の回転を無段階で変速可能な無段変速装置(31)と、
前記車体(1a)の走行負荷を検出する負荷検出部材(SN4,SN5,SN6)と、
前記車体(1a)の現在位置を計測する測位装置(SN7)と、
を備え、
圃場において走行した際に、前記負荷検出部材(SN4,SN5,SN6)が検出した走行負荷と、前記測位装置(SN7)が計測した位置とを関連付けて記憶しておき、記憶された過去の走行時の走行負荷と位置とに基づいて、前記走行負荷が基準値よりも高い位置では、前記走行負荷が前記基準値よりも低い位置よりも前記油圧モータ(49)の容量を大きくする
ことを特徴とする作業車両。
続きを表示(約 430 文字)
【請求項2】
前記走行負荷として前記駆動輪(2,3)の負荷トルクを検出するトルクセンサ(SN4)により構成された前記負荷検出部材(SN4)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項3】
前記走行負荷として前記無段変速装置(31)の内部圧力を検出する圧力センサ(SN5)により構成された前記負荷検出部材(SN5)、
を備えたことを特徴とする請求項1に記載の作業車両。
【請求項4】
前記走行負荷として前記エンジン(E)の回転数を検出する回転数センサ(SN6)により構成された前記負荷検出部材(SN6)、
を備え、
前記過去の走行時のエンジン回転数と位置とに基づいて、前記エンジン回転数の低下量が前記基準値よりも高い位置では、前記エンジン回転数の低下量が前記基準値よりも低い位置よりも前記油圧モータ(49)の容量を大きくする
ことを特徴とする請求項1に記載の作業車両。
発明の詳細な説明
【技術分野】
【0001】
この発明は、トラクタ、田植機、苗移植機等の作業車両に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
トラクタ等の作業車両において、車体のエンジンからの動力を、可変容量型の油圧ポンプと固定容量型の油圧モータとを備えた無段変速装置(HST:Hydraulic Static Transmission)で変速して作業機を作動させる構成が知られている。HSTを備えた作業車両では、油圧ポンプの可動斜板の傾斜角度を変更することで油圧モータの回転速度を変更し、車速が制御される(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-55704号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の従来の技術では、油圧モータの斜板は傾斜角が固定であったため、高いトルクが必要でない状態でも、一定のトルクで走行することとなり、非効率な場合があった。
【0005】
本発明は、無段変速装置でのトルクが固定の構成に比べて、効率的な走行を可能にすることを技術的課題とする。
【課題を解決するための手段】
【0006】
本発明の上記課題は次の解決手段により解決される。
請求項1に記載の発明は、エンジン(E)を有する車体(1a)と、前記エンジン(E)からの入力軸(32a)に接続される可変容量型の油圧ポンプ(47)と、前記車体(1a)の駆動輪(2,3)への出力軸(32b)に接続される可変容量型の油圧モータ(49)とを有し、前記入力軸(32a)から出力軸(32b)の回転を無段階で変速可能な無段変速装置(31)と、前記車体(1a)の走行負荷を検出する負荷検出部材(SN4,SN5,SN6)と、前記車体(1a)の現在位置を計測する測位装置(SN7)と、を備え、圃場において走行した際に、前記負荷検出部材(SN4,SN5,SN6)が検出した走行負荷と、前記測位装置(SN7)が計測した位置とを関連付けて記憶しておき、記憶された過去の走行時の走行負荷と位置とに基づいて、前記走行負荷が基準値よりも高い位置では、前記走行負荷が前記基準値よりも低い位置よりも前記油圧モータ(49)の容量を大きくすることを特徴とする作業車両である。
【0007】
請求項2に記載の発明は、前記走行負荷として前記駆動輪(2,3)の負荷トルクを検出するトルクセンサ(SN4)により構成された前記負荷検出部材(SN4)を備えたことを特徴とする請求項1に記載の作業車両である。
【0008】
請求項3に記載の発明は、前記走行負荷として前記無段変速装置(31)の内部圧力を検出する圧力センサ(SN5)により構成された前記負荷検出部材(SN5)を備えたことを特徴とする請求項1に記載の作業車両である。
【0009】
請求項4に記載の発明は、前記走行負荷として前記エンジン(E)の回転数を検出する回転数センサ(SN6)により構成された前記負荷検出部材(SN6)を備え、前記過去の走行時のエンジン回転数と位置とに基づいて、前記エンジン回転数の低下量が前記基準値よりも高い位置では、前記エンジン回転数の低下量が前記基準値よりも低い位置よりも前記油圧モータ(49)の容量を大きくすることを特徴とする請求項1に記載の作業車両である。
【発明の効果】
【0010】
請求項1記載の発明によれば、圃場において走行した際に負荷検出部材(SN4,SN5,SN6)が検出した走行負荷と測位装置(SN7)が計測した位置とを関連付けて記憶しておき、記憶された過去の走行時の走行負荷と位置とに基づいて、走行負荷が基準値よりも高い位置では、走行負荷が基準値よりも低い位置よりも油圧モータ(49)の容量を大きくすることで、無段変速装置でのトルクが固定の構成に比べて、効率的な走行を可能にすることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
留め具
1か月前
個人
給排気装置
2か月前
個人
ジョイント
2か月前
個人
ナット
1か月前
個人
ナット
2か月前
個人
ゲート弁バルブ
21日前
個人
吐出量監視装置
3か月前
カヤバ株式会社
緩衝器
2か月前
兼工業株式会社
バルブ
1か月前
株式会社ノーリツ
分配弁
2か月前
株式会社不二工機
電動弁
2か月前
株式会社奥村組
制振機構
2か月前
株式会社奥村組
制振機構
2か月前
アズビル株式会社
回転弁
2か月前
株式会社三五
ドライブシャフト
1か月前
竹内工業株式会社
ラッチ
6日前
株式会社ニフコ
クリップ
21日前
株式会社ニフコ
クリップ
2か月前
個人
誘導電流活用式差動制限装置
2か月前
アマテイ株式会社
釘
1か月前
アイホン株式会社
電気機器
2か月前
アズビル株式会社
連結装置
2日前
アズビル株式会社
連結装置
2日前
株式会社ノナガセ
免震装置
1か月前
カシオ計算機株式会社
支持台
2か月前
金子産業株式会社
筐体
22日前
Astemo株式会社
電磁弁
2か月前
株式会社山谷設備
被覆除去具
13日前
Astemo株式会社
緩衝器
1か月前
カヤバ株式会社
シリンダ装置
7日前
カヤバ株式会社
シリンダ装置
1か月前
個人
無段変速可能なフリーホイール
2か月前
株式会社フジキン
バルブ
1か月前
NTN株式会社
密封装置
3か月前
Astemo株式会社
緩衝装置
2か月前
NTN株式会社
焼結軸受
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ