TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025102285
公報種別
公開特許公報(A)
公開日
2025-07-08
出願番号
2023219632
出願日
2023-12-26
発明の名称
安定度向上装置
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
9/22 20060101AFI20250701BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アームの先端部の位置を維持したまま、産業用ロボットの安定度を高める。
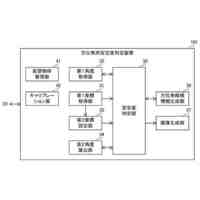
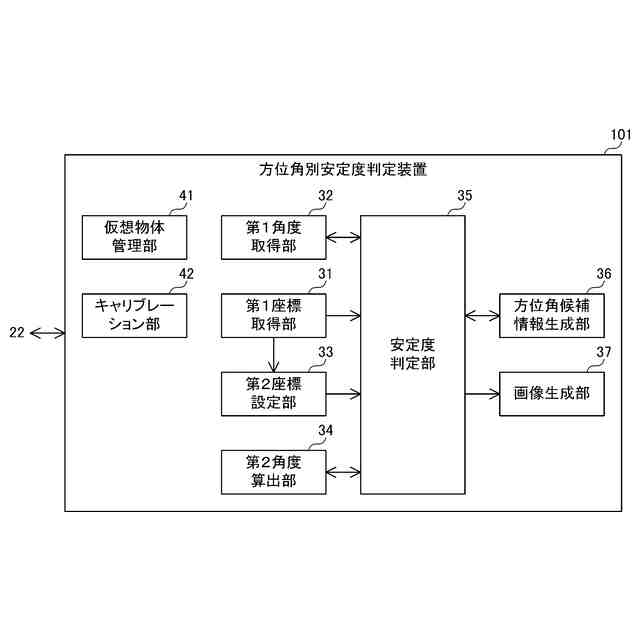
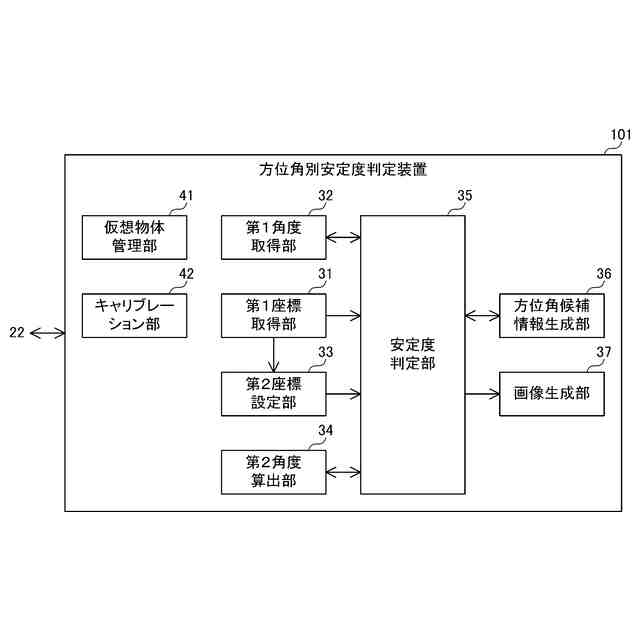
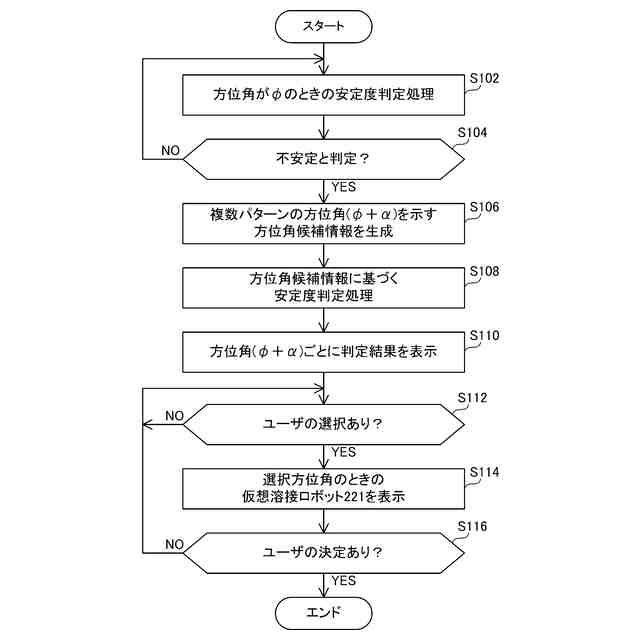
【解決手段】安定度向上装置は、中心軸に対して方位角方向に回転可能な先端部が端部に設けられ、複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームを備える産業用ロボットの先端部が位置する第1座標を取得する第1座標取得部31と、第1座標から離れた第2座標を取得する第2座標設定部と、第1座標に対する第2座標に関する、産業用ロボットの安定度を判定する安定度判定部35と、安定度判定部によって安定度が不安定と判定された場合、先端部の新たな方位角の候補を示す方位角候補情報を生成する方位角候補情報生成部36と、を備え、安定度判定部は、先端部の座標を第1座標に維持しながら、方位角候補情報に基づいて、方位角が候補のときの安定度を判定し、表示部は、方位角が候補のときの安定度判定部による判定結果を表示する。
【選択図】図3
特許請求の範囲
【請求項1】
中心軸に対して方位角方向に回転可能な先端部が端部に設けられ、複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームを備える産業用ロボットの前記先端部が位置する第1座標を取得する第1座標取得部と、
前記第1座標から離れた第2座標を取得する第2座標取得部と、
前記第1座標に対する前記第2座標に関する、前記産業用ロボットの安定度を判定する安定度判定部と、
前記安定度判定部によって前記安定度が不安定と判定された場合、前記先端部の新たな方位角の候補を示す方位角候補情報を生成する方位角候補情報生成部と、
表示部と、を備え、
前記安定度判定部は、前記先端部の座標を前記第1座標に維持しながら、前記方位角候補情報に基づいて、前記方位角が前記候補のときの前記安定度を判定し、
前記表示部は、前記方位角が前記候補のときの前記安定度判定部による判定結果を表示する、
安定度向上装置。
続きを表示(約 1,400 文字)
【請求項2】
前記第2座標取得部は、前記第1座標から異なる方向に離れた複数の前記第2座標を設定し、
前記安定度判定部は、前記第1座標に対する前記複数の前記第2座標それぞれに関する前記安定度を判定する、
請求項1に記載の安定度向上装置。
【請求項3】
前記方位角候補情報生成部は、複数の前記候補を示す前記方位角候補情報を生成し、
前記安定度判定部は、前記先端部の座標を前記第1座標に維持しながら、前記方位角候補情報に基づいて、前記方位角が前記複数の前記候補のときの複数の前記安定度をそれぞれ判定し、
前記表示部は、前記方位角が前記複数の前記候補のときの前記安定度判定部による判定結果を表示する、
請求項1に記載の安定度向上装置。
【請求項4】
前記表示部は、前記方位角が前記複数の前記候補のうちの少なくとも1つの前記候補のときの前記アームを表示する、
請求項3に記載の安定度向上装置。
【請求項5】
前記安定度向上装置は、
前記複数の前記候補のうち、選択された前記候補を受け付ける受付部をさらに備える、
請求項3に記載の安定度向上装置。
【請求項6】
中心軸に対して方位角方向に回転可能な先端部が端部に設けられ、複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームを備える産業用ロボットの前記先端部が位置する移動開始座標を取得する移動開始座標取得部と、
前記移動開始座標から離れた移動終了座標を取得する移動終了座標取得部と、
前記先端部が前記移動開始座標から前記移動終了座標に移動するときの前記産業用ロボットの安定度を判定する安定度判定部と、
前記安定度判定部によって前記安定度が不安定と判定された場合、前記先端部の新たな方位角の候補を示す方位角候補情報を生成する方位角候補情報生成部と、
表示部と、を備え、
前記安定度判定部は、前記先端部の座標を前記移動開始座標又は前記移動終了座標に維持しながら、前記方位角候補情報に基づいて、前記方位角が前記候補のときの前記安定度を判定し、
前記表示部は、前記方位角が前記候補のときの前記安定度判定部による判定結果を表示する、
安定度向上装置。
【請求項7】
前記方位角候補情報生成部は、複数の前記候補を示す前記方位角候補情報を生成し、
前記安定度判定部は、前記先端部の座標を前記移動開始座標又は前記移動終了座標に維持しながら、前記方位角候補情報に基づいて、前記方位角が前記複数の前記候補のときの複数の前記安定度をそれぞれ判定し、
前記表示部は、前記方位角が前記複数の前記候補のときの前記安定度判定部による判定結果を表示する、
請求項6に記載の安定度向上装置。
【請求項8】
前記表示部は、前記方位角が前記複数の前記候補のうちの少なくとも1つの前記候補のときの前記アームを表示する、
請求項7に記載の安定度向上装置。
【請求項9】
前記安定度向上装置は、
前記複数の前記候補のうち、選択された前記候補を受け付ける受付部をさらに備える、
請求項7に記載の安定度向上装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、安定度向上装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
ロボットのオペレータがロボット制御装置に接続された教示操作盤を使って実際にロボットを操作して、ロボットに所望の作業動作を教示することがある(例えば特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第6445092号公報
特許第6810093号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のロボットシステムでは、ロボット制御装置は、ロボットの手先部が通りうる複数の位置をそれぞれ算出してサンプリング点とし、サンプリング点がロボットの特異点やその近傍であるか否かを判定する。そして、ロボット制御装置は、各サンプリング点の位置と、各サンプリング点の判定処理の結果を示す判定結果情報を情報表示装置に通知する。
【0005】
しかしながら、特許文献1に開示されている技術では、ユーザは、サンプリング点がロボットの特異点やその近傍であることを認識することができるが、ロボットの手先部が特異点やその近傍を通らないようにする方法が分からない。
【0006】
そこで、本発明は、アームの先端部の位置を維持したまま、産業用ロボットの安定度を高めることが可能な安定度向上装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
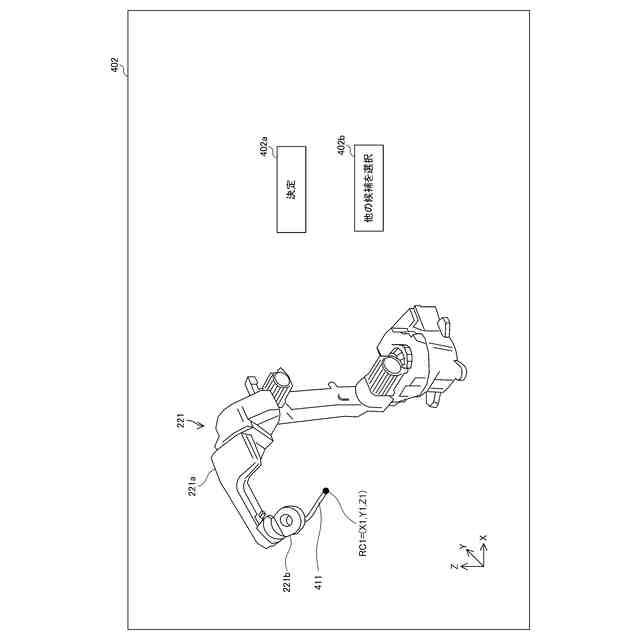
本発明の一態様に係る安定度向上装置は、中心軸に対して方位角方向に回転可能な先端部が端部に設けられ、複数の回転軸周りにそれぞれ回転可能な複数の関節部を含むアームを備える産業用ロボットの先端部が位置する第1座標を取得する第1座標取得部と、第1座標から離れた第2座標を取得する第2座標取得部と、第1座標に対する第2座標に関する、産業用ロボットの安定度を判定する安定度判定部と、安定度判定部によって安定度が不安定と判定された場合、先端部の新たな方位角の候補を示す方位角候補情報を生成する方位角候補情報生成部と、表示部と、を備え、安定度判定部は、先端部の座標を第1座標に維持しながら、方位角候補情報に基づいて、方位角が候補のときの安定度を判定し、表示部は、方位角が候補のときの安定度判定部による判定結果を表示する。
【0008】
この態様によれば、産業用ロボットの安定度が不安定な場合に先端部の方位角を新たな方位角にし、アームの先端部の位置を維持したままアームに含まれる各関節部の角度を変更することができる。これにより、ワーク又は産業用ロボットの位置を変更することなく産業用ロボットが安定になる可能性を高めることができる。したがって、アームの先端部の位置を維持したまま、産業用ロボットの安定度を高めることができる。
【0009】
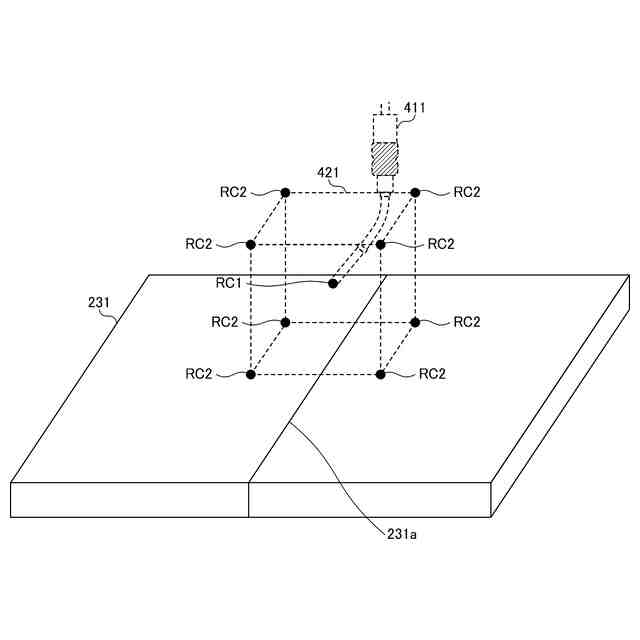
上記態様において、第2座標取得部は、第1座標から異なる方向に離れた複数の第2座標を設定し、安定度判定部は、第1座標に対する複数の第2座標それぞれに関する安定度を判定してもよい。
【0010】
この態様によれば、第1座標の位置から複数の第2座標の位置のいずれかにアームの先端部を移動させるときの安定度を判定することで、第1座標が特異点やその近傍に位置するか否かについてより正しく判定することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
溶接装置
8日前
株式会社ダイヘン
溶接装置
8日前
株式会社ダイヘン
溶接トーチ
7日前
株式会社ダイヘン
溶接トーチ
8日前
株式会社ダイヘン
溶接トーチ
8日前
株式会社ダイヘン
溶接トーチ
12日前
株式会社ダイヘン
直流電源回路
7日前
株式会社ダイヘン
安定度向上装置
7日前
株式会社ダイヘン
フラックス回収装置
6日前
株式会社ダイヘン
サブマージアーク溶接機
6日前
株式会社ダイヘン
サブマージアーク溶接機
8日前
株式会社ダイヘン
吸引ノズルおよびその製造方法
6日前
株式会社ダイヘン
ベルト伝動機構およびこれを備えた搬送ロボット
12日前
株式会社ダイヘン
治具、および、プラズマ切断トーチの電極の寿命の確認方法
7日前
株式会社ダイヘン
サブマージアーク溶接システム、および、サブマージアーク溶接方法
8日前
株式会社ザイテック
吸着装置
19日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
8日前
トヨタ自動車株式会社
関節機構
1か月前
株式会社ダイヘン
移動体
1か月前
個人
ペグハンマおよびペグハンマ用部品
12日前
株式会社ダイヘン
搬送装置
12日前
住友重機械工業株式会社
教示装置
5日前
東京都公立大学法人
対象物把持装置
1か月前
川崎重工業株式会社
ロボット
6日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
5日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
5日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
住友重機械工業株式会社
支援装置
12日前
庄内機械株式会社
釘打装置
2か月前
株式会社PILLAR
チューブ保持治具
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ