TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025079427
公報種別
公開特許公報(A)
公開日
2025-05-22
出願番号
2023192083
出願日
2023-11-10
発明の名称
搬送設備
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/697 20240101AFI20250515BHJP(制御;調整)
要約
【課題】複数の搬送車を用いて物品の搬送を行う場合に優れた搬送効率を実現できる搬送設備を提供する。
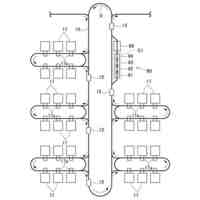
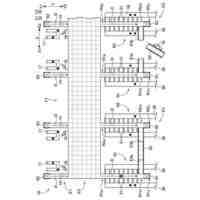
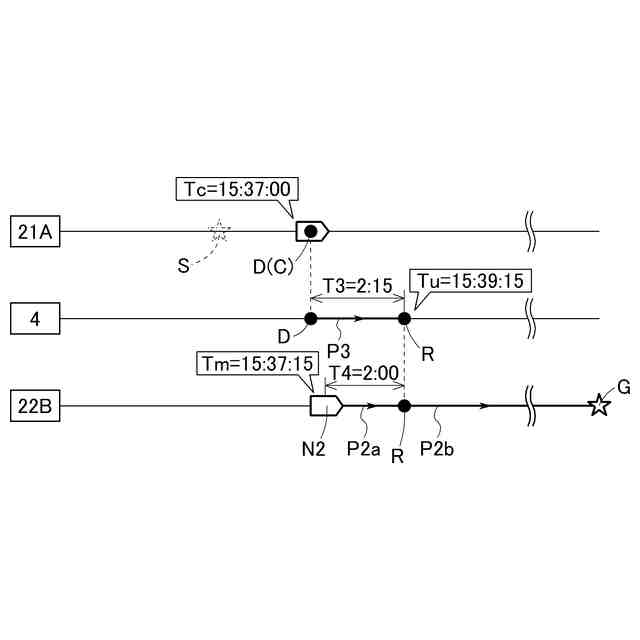
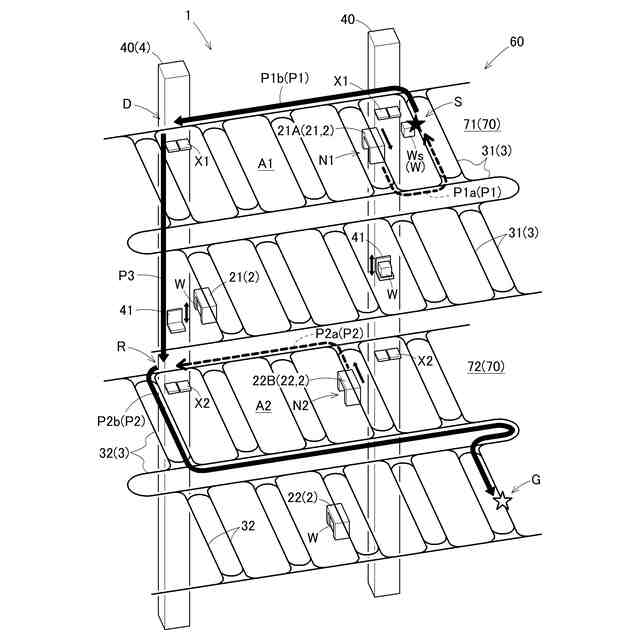
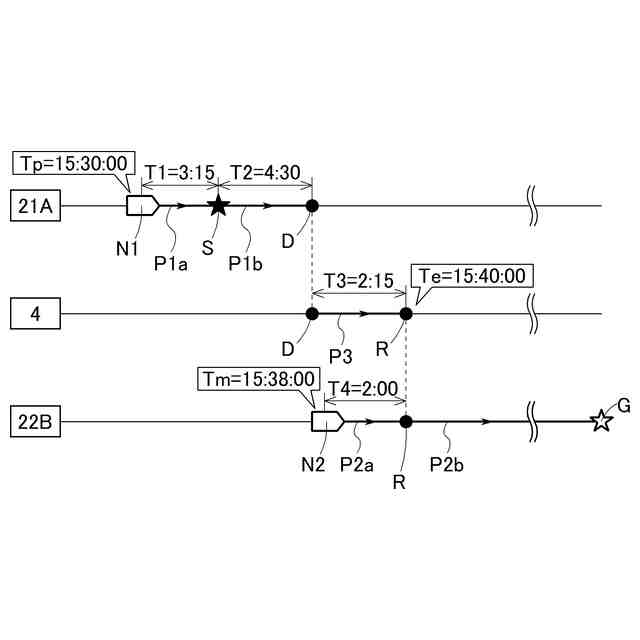
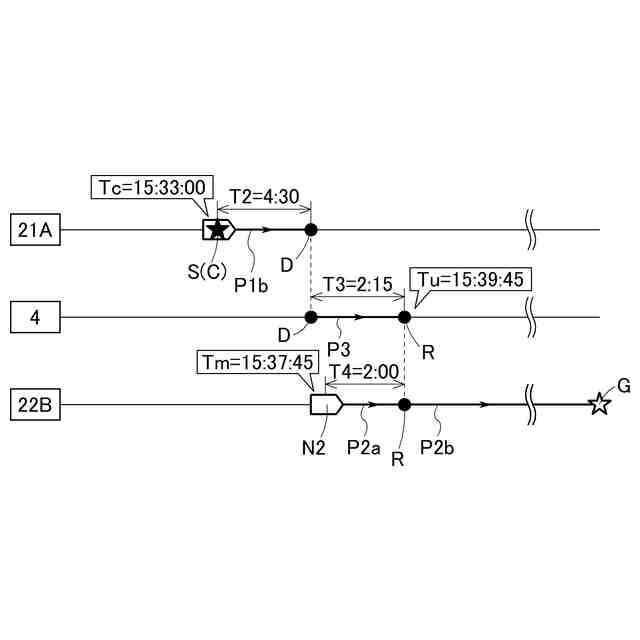
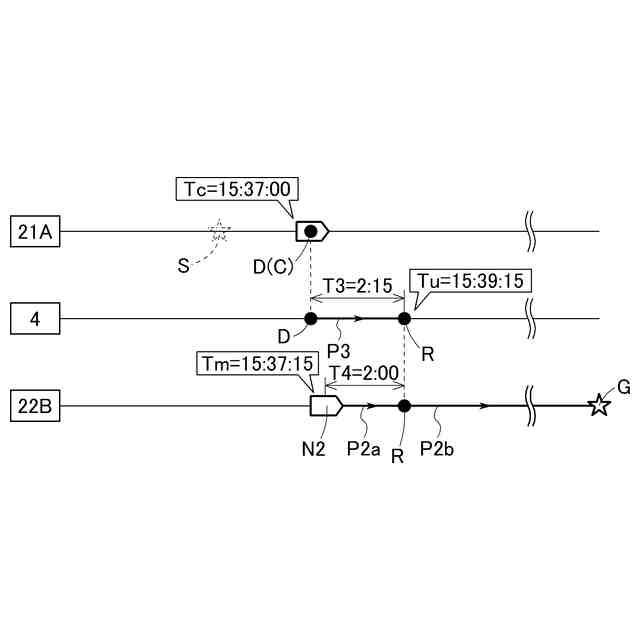
【解決手段】搬送設備は、複数の搬送車と制御システムとを備える。制御システムは、対象物品を2台の搬送車(21A,22B)を用いて搬送元(S)から中継装置(4)を経由して搬送先(G)まで搬送する場合に、対象物品が確認地点(C)を通過した確認地点通過時刻(Tc)に基づいて、対象物品の中継装置(4)の受取位置(R)への到着予測時刻を更新し、更新予測時刻(Tu)に合わせて第2搬送車(22B)を受取位置(R)に配車する。
【選択図】図7
特許請求の範囲
【請求項1】
物品を搬送する複数の搬送車と、複数の前記搬送車を制御する制御システムと、を備えた搬送設備であって、
前記制御システムは、対象とする前記物品である対象物品を2台の前記搬送車を用いて搬送元から中継装置を経由して搬送先まで搬送する場合に、
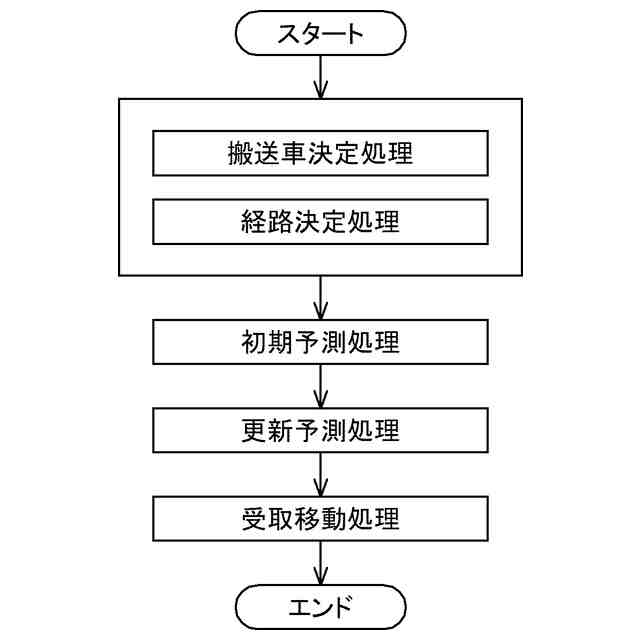
前記対象物品を前記搬送元から前記中継装置まで搬送する第1搬送車と、前記対象物品を前記中継装置から前記搬送先まで搬送する第2搬送車と、を決定する搬送車決定処理と、
前記第1搬送車が当該第1搬送車の現在位置から前記搬送元を経由して前記中継装置まで移動する経路である第1移動経路と、前記第2搬送車が当該第2搬送車の現在位置から前記中継装置を経由して前記搬送先まで移動する経路である第2移動経路と、を決定する経路決定処理と、
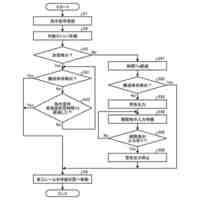
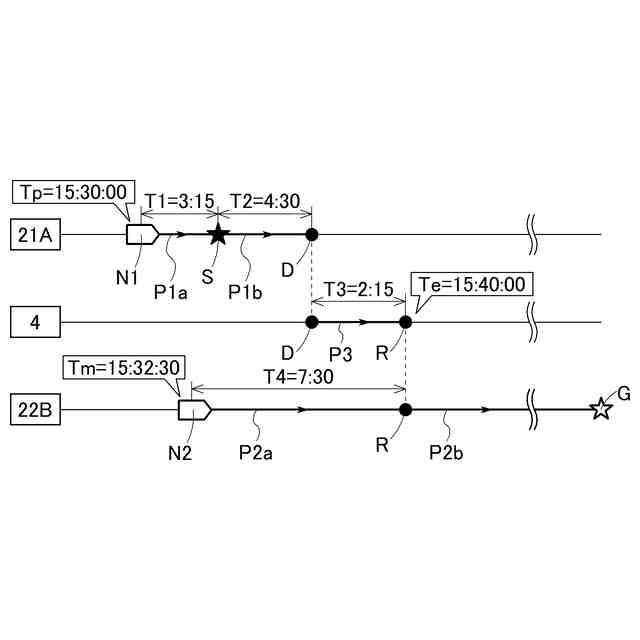
前記対象物品が前記中継装置における前記第2搬送車による受取位置に到着する予測時刻である到着予測時刻を、前記第1移動経路に基づいて、初期予測時刻として導出する初期予測処理と、
前記第1移動経路の少なくとも1箇所に設定された確認地点を前記対象物品が通過した時刻である確認地点通過時刻を取得し、前記確認地点通過時刻に基づいて、更新された前記到着予測時刻である更新予測時刻を導出する更新予測処理と、
前記更新予測時刻の導出前は前記初期予測時刻に基づき、前記更新予測時刻の導出後は前記更新予測時刻に基づいて、前記対象物品が前記受取位置に到着する予測時刻に合わせて前記第2搬送車を前記受取位置に到着させるように前記第2搬送車を移動させる受取移動処理と、
を実行する、搬送設備。
続きを表示(約 1,100 文字)
【請求項2】
前記制御システムは、前記受取移動処理において、
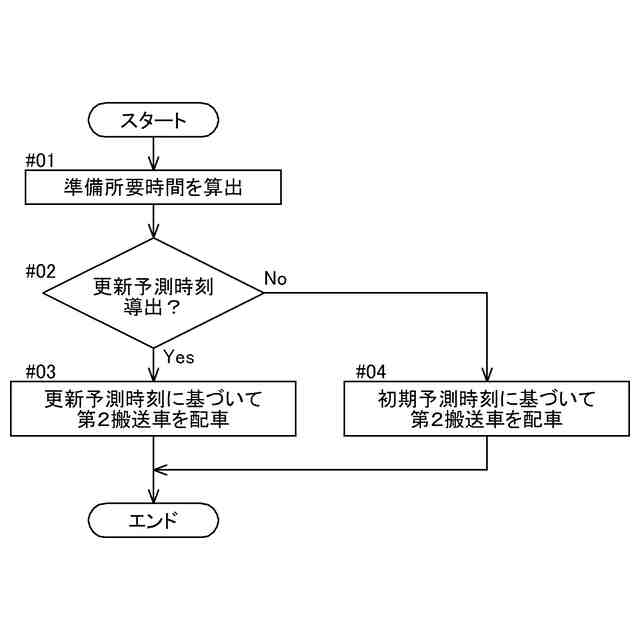
前記第2移動経路のうち前記第2搬送車の現在位置から前記中継装置までの経路に基づいて前記第2搬送車が前記受取位置に到着するまでに必要な所要時間を導出し、
前記初期予測時刻から前記所要時間前の時刻になる前に前記更新予測時刻が導出された場合、前記更新予測時刻から前記所要時間前の時刻になったことに基づいて前記第2搬送車を前記受取位置へ向かわせる、請求項1に記載の搬送設備。
【請求項3】
前記制御システムは、前記受取移動処理において、
前記更新予測時刻が導出される前に前記初期予測時刻から前記所要時間前の時刻になった場合、前記初期予測時刻から前記所要時間前の時刻になったことに基づいて前記第2搬送車を前記受取位置へ向かわせる、請求項2に記載の搬送設備。
【請求項4】
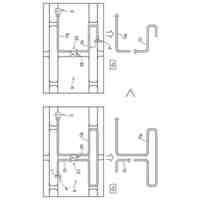
前記中継装置は、前記第1搬送車からの前記対象物品の引渡位置から前記受取位置まで前記対象物品を搬送する搬送装置であり、
前記制御システムは、
前記第1移動経路における前記第1搬送車の現在位置から前記引渡位置まで移動する前記第1搬送車の移動時間と、前記搬送装置による前記引渡位置から前記受取位置までの前記対象物品の搬送時間と、に基づいて前記初期予測時刻を導出し、
前記確認地点通過時刻と、前記第1移動経路における前記確認地点から前記引渡位置まで移動する前記第1搬送車の移動時間と、前記搬送装置による前記引渡位置から前記受取位置までの前記対象物品の搬送時間と、に基づいて前記更新予測時刻を導出する、請求項1から3のいずれか一項に記載の搬送設備。
【請求項5】
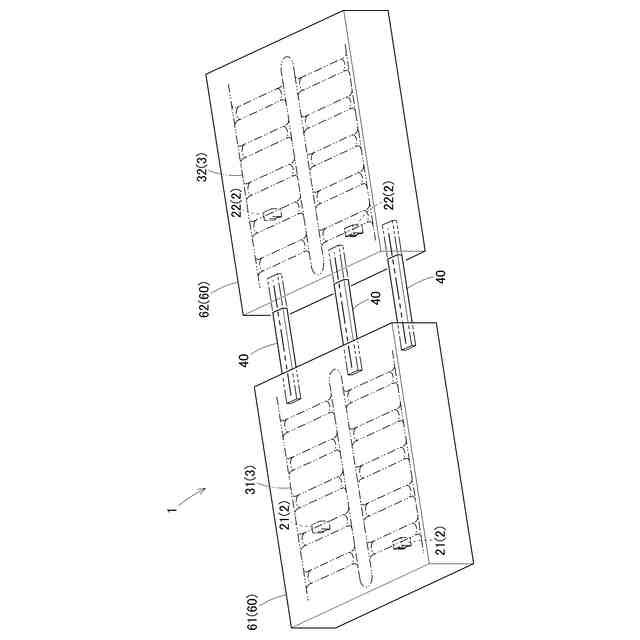
前記第1搬送車は、第1エリアにおいて前記対象物品を搬送し、
前記第2搬送車は、第2エリアにおいて前記対象物品を搬送し、
前記中継装置は、前記第1エリアと前記第2エリアとの間で前記対象物品を搬送するエリア間搬送装置であり、
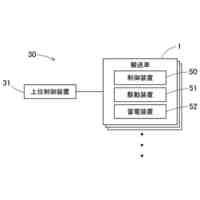
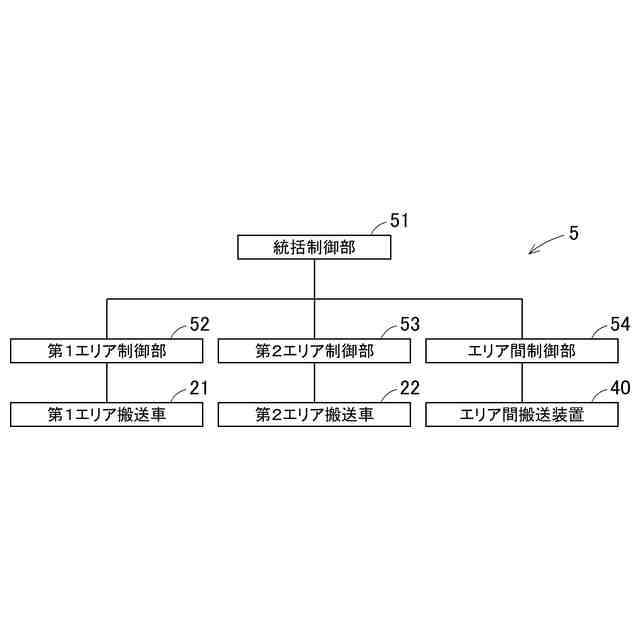
前記制御システムは、前記第1エリアにおける前記搬送車の制御を行う第1制御部と、前記第2エリアにおける前記搬送車の制御を行う第2制御部と、前記第1制御部及び前記第2制御部を制御する統括制御部と、を備え、
前記第1制御部が、前記確認地点通過時刻の情報である通過時刻情報を取得して、当該通過時刻情報を前記統括制御部へ送信し、
前記統括制御部が、前記更新予測処理を行い、導出した前記更新予測時刻を、前記第2制御部へ通知し、
前記第2制御部が、通知された前記更新予測時刻に基づいて、前記受取移動処理を実行する、請求項1から3のいずれか一項に記載の搬送設備。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送設備に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
物品を搬送する複数の搬送車と、複数の搬送車を制御する制御システムとを備えた搬送設備が利用されている。このような搬送設備の一例が、特開2020-101846号公報(特許文献1)に開示されている。
【0003】
特許文献1の搬送設備では、対象物品を搬送車が搬送可能となる時刻を予測し、その予測された時刻に搬送車が対象物品の受け取りのために到着しているように、搬送車を配車する。このような構成とすることで、対象物品が搬送可能となった直後から直ちに搬送することが可能となり、搬送効率の向上が図られている。
【先行技術文献】
【特許文献】
【0004】
特開2020-101846号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、対象物品を搬送可能となる時刻を予測した後、何らかの事情で実際に搬送可能となる時刻が予測時刻からずれる場合がある。例えば搬送車の移動経路で混雑や渋滞が生じていたり、移動経路の一部が通行止めとなっていたりすること等により、実際に搬送可能となる時刻が予測時刻から遅れる場合がある。逆に、搬送車が移動経路を想定外に円滑に移動したこと等より、実際に搬送可能となる時刻が予測時刻よりも早まる場合がある。
【0006】
前者の場合には、対象物品を受け取る搬送車が、実際に対象物品が到着するまで待機しなければならず、設備全体としての搬送効率が低下する。また、後者の場合には、対象物品が到着していてもそれを受け取る搬送車が到着するまでは搬送を開始できず、やはり搬送効率が低下する。
【0007】
そこで、複数の搬送車を用いて物品の搬送を行う場合に優れた搬送効率を実現できる搬送設備が望まれる。
【課題を解決するための手段】
【0008】
本開示に係る搬送設備は、
物品を搬送する複数の搬送車と、複数の前記搬送車を制御する制御システムと、を備えた搬送設備であって、
前記制御システムは、対象とする前記物品である対象物品を2台の前記搬送車を用いて搬送元から中継装置を経由して搬送先まで搬送する場合に、
前記対象物品を前記搬送元から前記中継装置まで搬送する第1搬送車と、前記対象物品を前記中継装置から前記搬送先まで搬送する第2搬送車と、を決定する搬送車決定処理と、
前記第1搬送車が当該第1搬送車の現在位置から前記搬送元を経由して前記中継装置まで移動する経路である第1移動経路と、前記第2搬送車が当該第2搬送車の現在位置から前記中継装置を経由して前記搬送先まで移動する経路である第2移動経路と、を決定する経路決定処理と、
前記対象物品が前記中継装置における前記第2搬送車による受取位置に到着する予測時刻である到着予測時刻を、前記第1移動経路に基づいて、初期予測時刻として導出する初期予測処理と、
前記第1移動経路の少なくとも1箇所に設定された確認地点を前記対象物品が通過した時刻である確認地点通過時刻を取得し、前記確認地点通過時刻に基づいて、更新された前記到着予測時刻である更新予測時刻を導出する更新予測処理と、
前記更新予測時刻の導出前は前記初期予測時刻に基づき、前記更新予測時刻の導出後は前記更新予測時刻に基づいて、前記対象物品が前記受取位置に到着する予測時刻に合わせて前記第2搬送車を前記受取位置に到着させるように前記第2搬送車を移動させる受取移動処理と、
を実行する。
【0009】
この構成によれば、対象物品を2台の搬送車を用いて搬送元から搬送先まで搬送する場合に、初期予測処理及び受取移動処理を実行することで、対象物品が中継装置の受取位置に到着する初期予測時刻に合わせて第2搬送車を当該受取位置に配車できる。よって、対象物品が中継装置の受取位置に到着した直後から当該対象物品を第2搬送車で直ちに搬送することができる。さらに、更新予測処理を実行するとともにそれによって導出される更新予測時刻を用いて受取移動処理を実行することで、更新予測時刻に合わせて第2搬送車を当該受取位置に配車できる。よって、第1搬送車が確認地点を通過する時刻に初期の予想とのずれがあった場合には、当該ずれを補正して、対象物品が中継装置の受取位置に到着した直後から当該対象物品を第2搬送車で直ちに搬送することができる。これらのことから、複数の搬送車を用いて物品の搬送を行う場合に優れた搬送効率を実現することができる。
【0010】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイフク
倉庫
2か月前
株式会社ダイフク
倉庫
1か月前
株式会社ダイフク
搬送車
7日前
株式会社ダイフク
作業設備
7日前
株式会社ダイフク
作業設備
7日前
株式会社ダイフク
作業設備
7日前
株式会社ダイフク
作業設備
7日前
株式会社ダイフク
作業設備
7日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
作業設備
1か月前
株式会社ダイフク
作業設備
7日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
17日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
洗浄装置
1か月前
株式会社ダイフク
洗浄装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
27日前
株式会社ダイフク
物品搬送設備
17日前
株式会社ダイフク
物品搬送設備
17日前
株式会社ダイフク
搬送システム
11日前
株式会社ダイフク
ローラコンベヤ
2か月前
株式会社ダイフク
自動倉庫システム
7日前
株式会社ダイフク
手荷物保管システム
1か月前
株式会社ダイフク
移動体清掃システム
25日前
株式会社ダイフク
治具、および交換補助具
17日前
株式会社ダイフク
開閉機構およびカバー構造
1か月前
株式会社ダイフク
物品処理装置、及び、物品保管設備
1か月前
株式会社ダイフク
洗浄装置および洗浄装置管理システム
1か月前
株式会社ダイフク
搬送車、及び、搬送車を備えた搬送設備
1か月前
台湾大福高科技設備股分有限公司
物体搬送システム
7日前
台湾大福高科技設備股分有限公司
物体搬送システム
11日前
台湾大福高科技設備股分有限公司
物体搬送システム
2か月前
株式会社ダイフク
物品仕分け設備
6日前
個人
生産早送り装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ