TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025101317
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218085
出願日
2023-12-25
発明の名称
飛行体制御システム
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
G05D
1/229 20240101AFI20250630BHJP(制御;調整)
要約
【課題】飛行体の飛行経路を設定する場合の処理負担を軽減可能な飛行体制御システムを実現する。
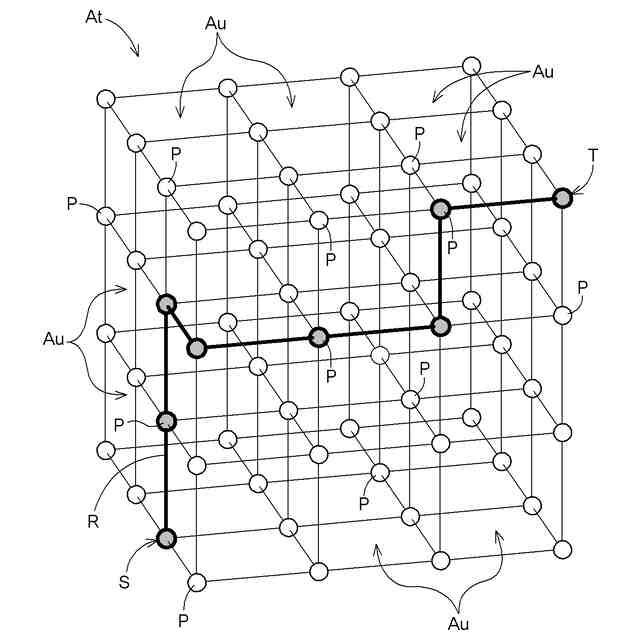
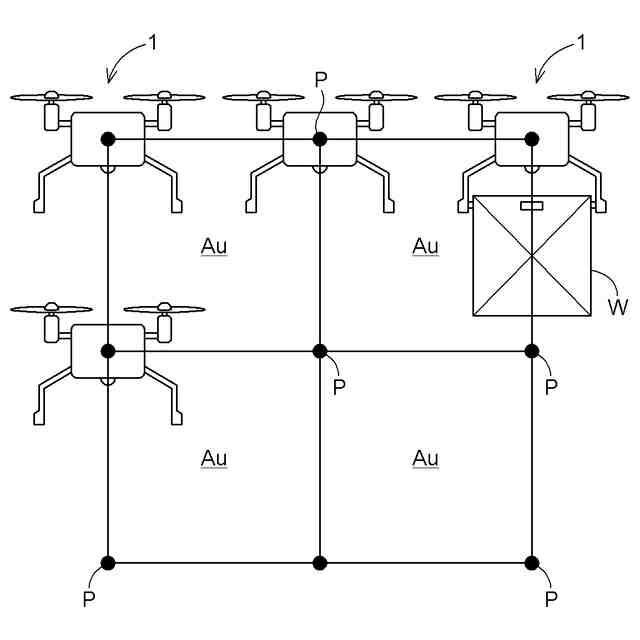
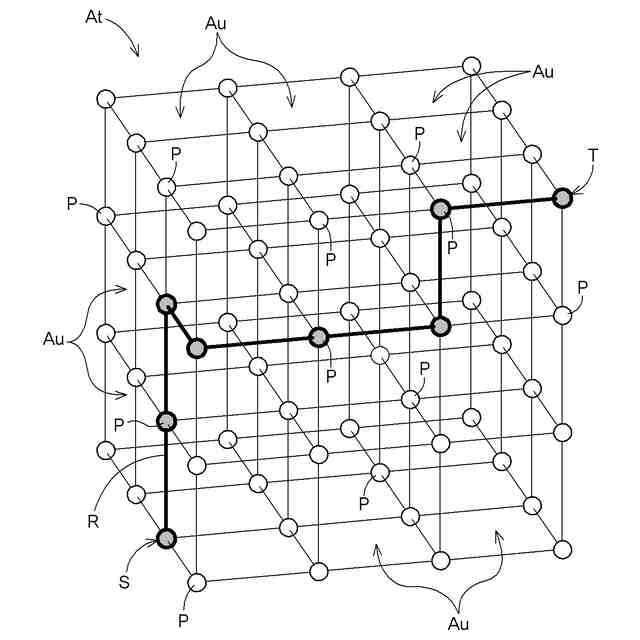
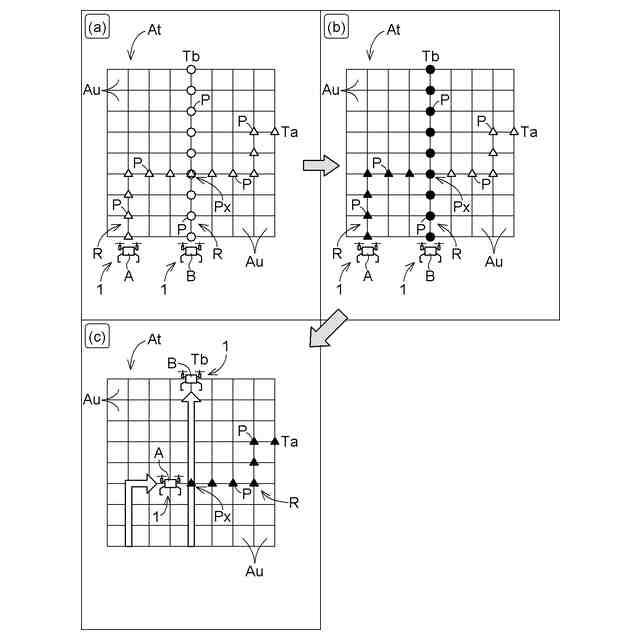
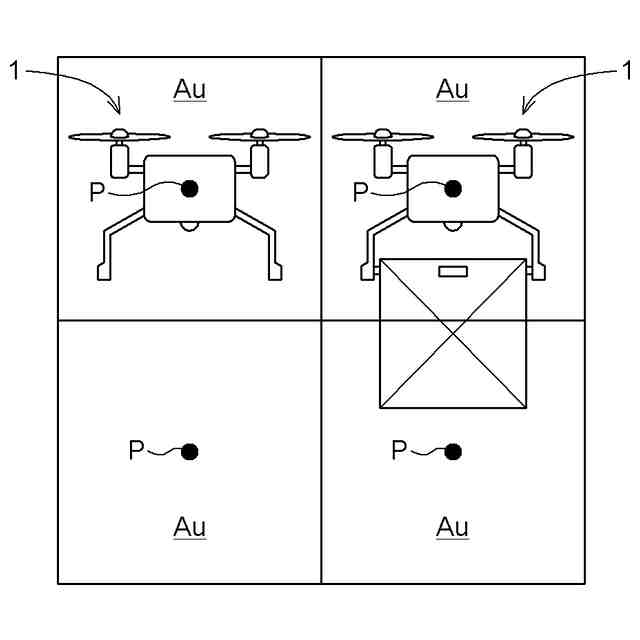
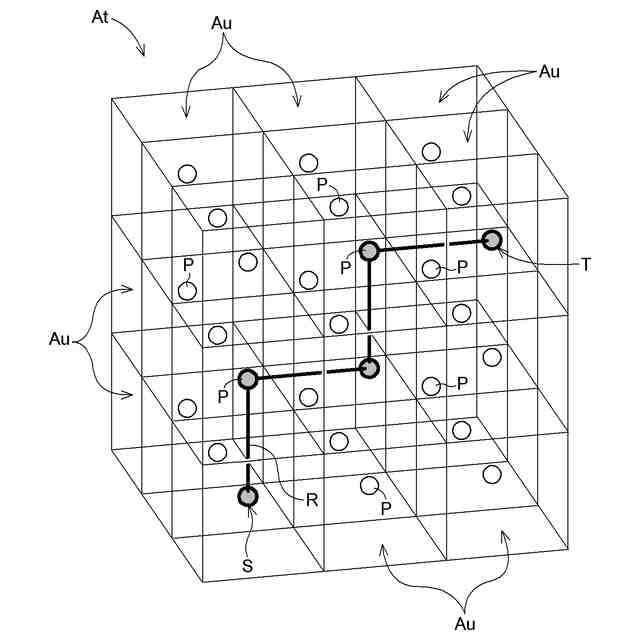
【解決手段】経路設定部は、飛行体の飛行可能エリアの少なくとも一部である対象エリアAtを複数の単位エリアAuに区画すると共に、それぞれの単位エリアAuにエリア基準点Pを設定し、複数の飛行体のそれぞれが通過するエリア基準点Pを決定する。単位エリアAuは、互いに隣接する複数の単位エリアAuのそれぞれのエリア基準点Pに配置された飛行体同士が干渉しない大きさの3次元形状に設定されている。経路設定部は、同じエリア基準点Pに複数の飛行体が同時に存在せず、且つ、1つのエリア基準点Pから他のエリア基準点Pに移動する飛行体が他の飛行体と干渉しないように、飛行経路Rを設定する。
【選択図】図4
特許請求の範囲
【請求項1】
複数の飛行体を制御する飛行体制御システムであって、
それぞれの前記飛行体の飛行経路を設定する経路設定部を備え、
前記経路設定部は、前記飛行体の飛行可能エリアの少なくとも一部である対象エリアを複数の単位エリアに区画すると共に、それぞれの前記単位エリアにエリア基準点を設定し、複数の前記飛行体のそれぞれが通過する前記エリア基準点を決定するように構成され、
前記単位エリアは、互いに隣接する複数の前記単位エリアのそれぞれの前記エリア基準点に配置された前記飛行体同士が干渉しない大きさの3次元形状に設定され、
前記経路設定部は、同じ前記エリア基準点に複数の前記飛行体が同時に存在せず、且つ、1つの前記エリア基準点から他の前記エリア基準点に移動する前記飛行体が他の前記飛行体と干渉しないように、前記飛行経路を設定する、飛行体制御システム。
続きを表示(約 860 文字)
【請求項2】
複数の前記単位エリアは、互いに同一の多面体形状に設定されていると共に、前記対象エリア内に隙間なく配置され、
前記経路設定部は、互いに面で接し合う前記単位エリア同士の前記エリア基準点を繋ぐように、前記飛行経路を設定する、請求項1に記載の飛行体制御システム。
【請求項3】
複数の前記単位エリアは、互いに同一の多面体形状に設定されていると共に、前記対象エリア内に隙間なく配置され、
前記エリア基準点は、前記単位エリアのそれぞれが備える複数の頂点のうちの1つに設定される、請求項1に記載の飛行体制御システム。
【請求項4】
前記単位エリアは、前記飛行体を内包可能な大きさ及び形状であり、
前記エリア基準点は、当該エリア基準点に位置する前記飛行体が前記単位エリアに内包されるような位置に設定される、請求項1に記載の飛行体制御システム。
【請求項5】
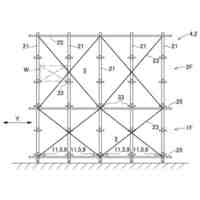
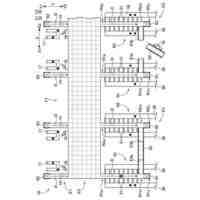
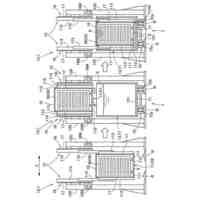
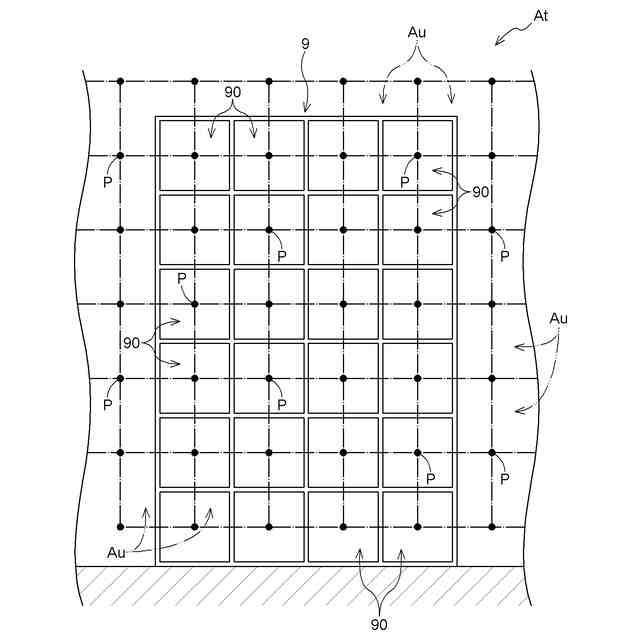
前記対象エリア内に、物品が収容される収容部を複数備えた物品収容棚が配置され、
前記経路設定部は、複数の前記収容部のそれぞれに1つの前記エリア基準点を設定する、請求項1から4のいずれか一項に記載の飛行体制御システム。
【請求項6】
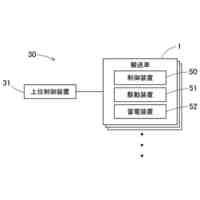
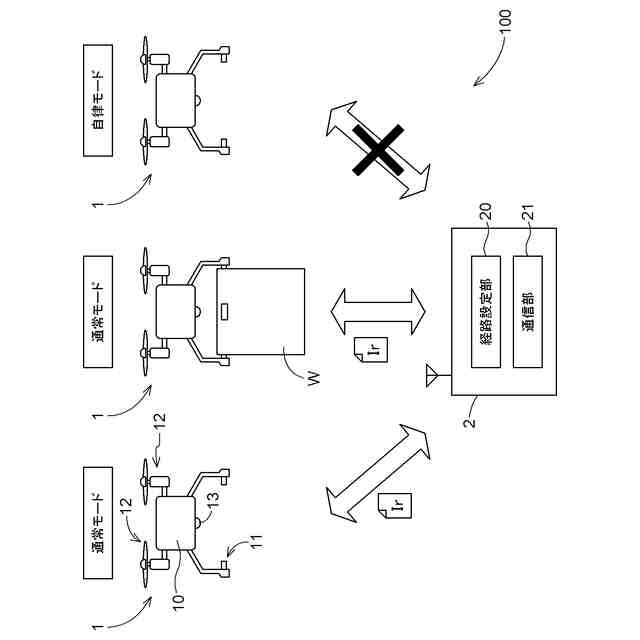
通信部を備え、
前記通信部は、複数の前記飛行体の相互の通信、及び、複数の前記飛行体を制御する制御装置とそれぞれの前記飛行体との通信の少なくとも一方を行うように構成され、
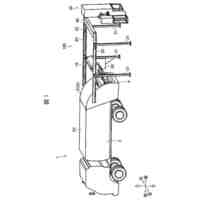
前記飛行体は、
自機の周辺の障害物を検知する周辺検知センサを備え、
前記通信部による通信の不良が生じていない場合には、前記経路設定部により設定された前記飛行経路に従って飛行する通常モードとなり、
前記通信部による通信の不良が生じた場合には、飛行速度を予め定められた制限速度以下とすると共に、前記周辺検知センサを用いて前記障害物との衝突を回避しつつ飛行する自律モードとなる、請求項1から4のいずれか一項に記載の飛行体制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、複数の飛行体を制御する飛行体制御システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、飛行体、いわゆるドローンを用いた技術が、様々な分野で活用されている。例えば特開2021-020529号公報(特許文献1)には、飛行体を用いて物品を搬送する技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-020529号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の技術のように飛行体を物品の搬送に利用する場合において、例えば、予め設定された制限エリア内で複数の飛行体を飛行させて、これらの飛行体に物品の搬送を行わせることが考えられる。しかしながら、制限エリア内では飛行体の飛行経路が限られ、また、複数の飛行体が同じ制限エリア内に存在することにより飛行経路の設定の制約も大きくなる。従って、複数の飛行体が互いに干渉せずに飛行するためには、それぞれの飛行体の飛行経路の設定に際して複雑な演算処理が伴い易い。
【0005】
上記実状に鑑みて、飛行体の飛行経路を設定する場合の処理負担を軽減可能な飛行体制御システムの実現が望まれている。
【課題を解決するための手段】
【0006】
複数の飛行体を制御する飛行体制御システムであって、
それぞれの前記飛行体の飛行経路を設定する経路設定部を備え、
前記経路設定部は、前記飛行体の飛行可能エリアの少なくとも一部である対象エリアを複数の単位エリアに区画すると共に、それぞれの前記単位エリアにエリア基準点を設定し、複数の前記飛行体のそれぞれが通過する前記エリア基準点を決定するように構成され、
前記単位エリアは、互いに隣接する複数の前記単位エリアのそれぞれの前記エリア基準点に配置された前記飛行体同士が干渉しない大きさの3次元形状に設定され、
前記経路設定部は、同じ前記エリア基準点に複数の前記飛行体が同時に存在せず、且つ、1つの前記エリア基準点から他の前記エリア基準点に移動する前記飛行体が他の前記飛行体と干渉しないように、前記飛行経路を設定する。
【0007】
本構成によれば、経路設定部は、対象エリアを3次元形状の複数の単位エリアによって区画し、各単位エリアのエリア基準点を通るように飛行経路を設定する。これにより、複数の飛行体のそれぞれが任意の経路を飛行できる場合に比べて、それぞれの飛行体の飛行経路の演算処理の負荷を大幅に軽減することができる。また、単位エリアの大きさは飛行体の大きさが考慮されたものであると共に、飛行経路の設定は飛行体同士が干渉しないようにされる。従って、対象エリア内において飛行体同士が干渉することを回避することができる。以上のように、本構成によれば、飛行体同士の干渉を回避しつつ、飛行体の飛行経路を設定する場合の処理負担を軽減することができる。
【0008】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
【0009】
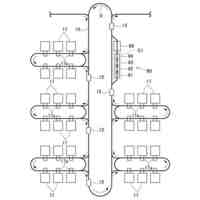
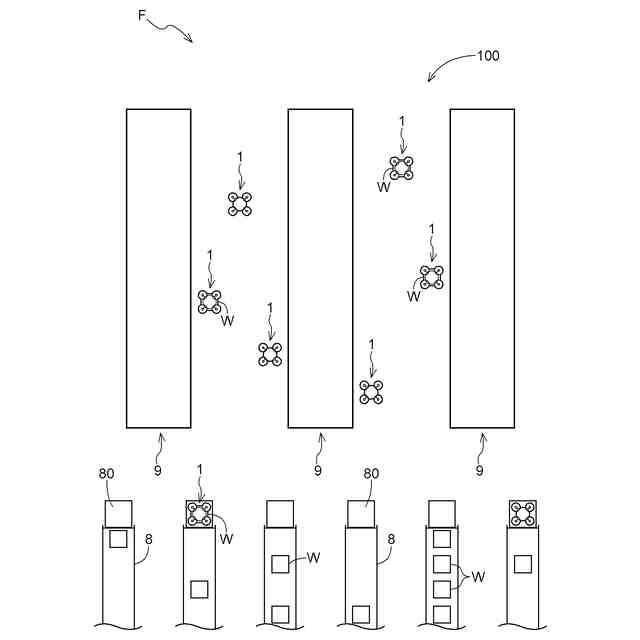
飛行体制御システムを用いた物品搬送設備の平面図
飛行体制御システムのシステム構成図
単位エリアとエリア基準点とを示す図
エリア基準点に基づいて飛行経路を設定する場合の説明図
飛行経路が重複する飛行体同士による飛行時の処理を示す図
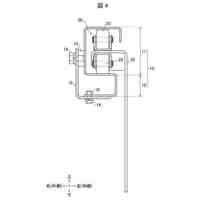
物品収容棚の収容部とエリア基準点との対応関係を示す図
第2実施形態における単位エリアとエリア基準点とを示す図
第2実施形態において、エリア基準点に基づいて飛行経路を設定する場合の説明図
【発明を実施するための形態】
【0010】
飛行体制御システムは、複数の飛行体を制御するシステムである。例えば、飛行体制御システムは、物流システムの一部を構成する。以下では、飛行体制御システムが物品搬送設備に用いられ、物流システムの一部を構成している場合を例示して、飛行体制御システムの実施形態について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ダイフク
倉庫
1か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
作業設備
10日前
株式会社ダイフク
洗浄装置
14日前
株式会社ダイフク
洗浄装置
14日前
株式会社ダイフク
搬送設備
14日前
株式会社ダイフク
搬送設備
17日前
株式会社ダイフク
物品搬送設備
6日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
ローラコンベヤ
1か月前
株式会社ダイフク
移動体清掃システム
4日前
株式会社ダイフク
手荷物保管システム
10日前
株式会社ダイフク
開閉機構およびカバー構造
18日前
株式会社ダイフク
物品処理装置、及び、物品保管設備
1か月前
株式会社ダイフク
洗浄装置および洗浄装置管理システム
27日前
株式会社ダイフク
搬送車、及び、搬送車を備えた搬送設備
18日前
個人
生産早送り装置
1か月前
株式会社豊田自動織機
産業車両
24日前
株式会社FUJI
工作機械
2か月前
株式会社カネカ
製造システム
10日前
株式会社ダイヘン
移動体
2か月前
株式会社FUJI
加工機械ライン
1か月前
愛知製鋼株式会社
車両用システム
18日前
ローム株式会社
基準電圧源
7日前
個人
作業車両自動化システム
1か月前
ローム株式会社
半導体集積回路
3か月前
愛知製鋼株式会社
目標軌跡の設定方法
1か月前
トヨタ自動車株式会社
移動制御システム
1か月前
三栄ハイテックス株式会社
基準電圧回路
3か月前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
14日前
トヨタ自動車株式会社
生産管理システム
1か月前
株式会社ダイフク
搬送設備
2か月前
株式会社オプトン
制御プログラム生成装置
2か月前
トヨタ自動車株式会社
減圧弁
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ