TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025075471
公報種別
公開特許公報(A)
公開日
2025-05-15
出願番号
2023186661
出願日
2023-10-31
発明の名称
移動体、及び制御方法
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05D
1/242 20240101AFI20250508BHJP(制御;調整)
要約
【課題】2次元距離センサを用いて移動体を適切に自律移動できるようにすること。
【解決手段】移動体であって、水平方向の各位置に応じた物体までの各距離を測定する2次元距離センサと、前記2次元距離センサに基づいて、前記移動体から第1平面までの距離と、前記移動体から第2平面までの距離と、を算出する算出部と、前記算出部による算出結果と、前記第1平面からの距離及び前記第2平面からの距離を含む目標地点を示す情報と、に基づいて、前記移動体を前記目標地点まで自律移動させる制御部と、を有する移動体が提供される。
【選択図】図2
特許請求の範囲
【請求項1】
移動体であって、
水平方向の各位置に応じた物体までの各距離を測定する2次元距離センサと、
前記2次元距離センサに基づいて、前記移動体から第1平面までの距離と、前記移動体から第2平面までの距離と、を算出する算出部と、
前記算出部による算出結果と、前記第1平面からの距離及び前記第2平面からの距離を含む目標地点を示す情報と、に基づいて、前記移動体を前記目標地点まで自律移動させる制御部と、
を有する移動体。
続きを表示(約 740 文字)
【請求項2】
前記制御部は、
前記2次元距離センサの上下方向の向きを、前記目標地点に応じた向きに制御する、
請求項1に記載の移動体。
【請求項3】
前記目標地点を示す情報は、前記第1平面からの距離、前記第2平面からの距離、及び第3平面からの距離を含み、
前記算出部は、前記第1平面の認識精度が閾値以下である場合、前記2次元距離センサに基づいて、前記移動体から前記第2平面までの距離と、前記移動体から前記第3平面までの距離を算出し、
前記制御部は、前記算出部による算出結果と、前記目標地点を示す情報に含まれる前記第2平面からの距離及び前記第3平面からの距離に基づいて、前記移動体を前記目標地点まで自律移動させる、
請求項1または2に記載の移動体。
【請求項4】
前記制御部は、
前記2次元距離センサの位置及び向きを変更させ、前記第1平面の認識精度が閾値以上である前記2次元距離センサの位置で、前記移動体から前記第1平面までの距離を測定し、
前記第2平面の認識精度が閾値以上である前記2次元距離センサの位置で、前記移動体から前記第2平面までの距離を測定する、
請求項1または2に記載の移動体。
【請求項5】
移動体が、
水平方向の各位置に応じた物体までの各距離を測定する2次元距離センサに基づいて、前記移動体から第1平面までの距離と、前記移動体から第2平面までの距離と、を算出し、
算出結果と、前記第1平面からの距離及び前記第2平面からの距離を含む目標地点を示す情報と、に基づいて、前記移動体を前記目標地点まで自律移動する、
制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、移動体、及び制御方法に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来、センサを用いて、車両やロボット等の移動体を自律的に移動(走行)させる技術が知られている(例えば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
特開2022-028342号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、例えば、センサを用いて移動体を自律的に移動させるために改善の余地がある。
【0005】
本開示の目的は、2次元距離センサを用いて移動体を適切に自律移動できる技術を提供することである。
【課題を解決するための手段】
【0006】
本開示に係る第1の態様では、移動体であって、水平方向の各位置に応じた物体までの各距離を測定する2次元距離センサと、前記2次元距離センサに基づいて、前記移動体から第1平面までの距離と、前記移動体から第2平面までの距離と、を算出する算出部と、前記算出部による算出結果と、前記第1平面からの距離及び前記第2平面からの距離を含む目標地点を示す情報と、に基づいて、前記移動体を前記目標地点まで自律移動させる制御部と、を有する移動体が提供される。
【0007】
また、本開示に係る第2の態様では、移動体が、水平方向の各位置に応じた物体までの各距離を測定する2次元距離センサに基づいて、前記移動体から第1平面までの距離と、前記移動体から第2平面までの距離と、を算出し、算出結果と、前記第1平面からの距離及び前記第2平面からの距離を含む目標地点を示す情報と、に基づいて、前記移動体を前記目標地点まで自律移動する、制御方法が提供される。
【発明の効果】
【0008】
一側面によれば、2次元距離センサを用いて移動体を適切に自律移動できる。
【図面の簡単な説明】
【0009】
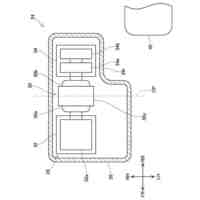
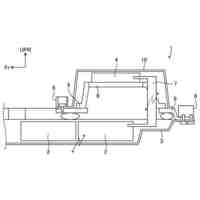
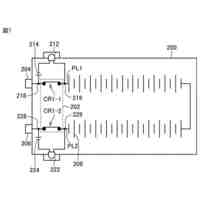
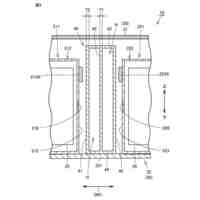
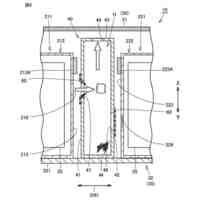
実施形態に係る移動体の構成の一例を示す図である。
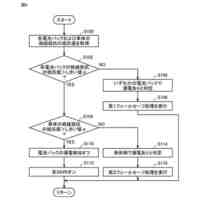
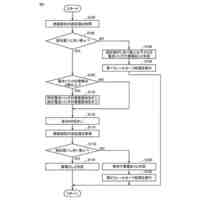
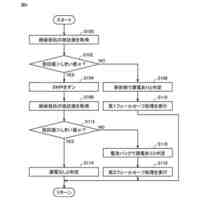
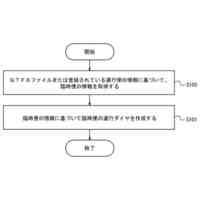
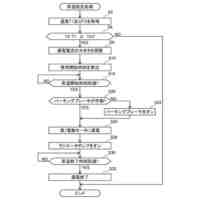
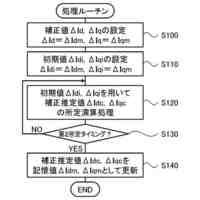
実施形態に係る情報処理装置の処理の一例を示すフローチャートである。
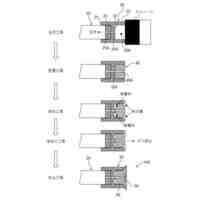
実施形態に係るX軸方向の各点における平面の認識精度の一例を示す図である。
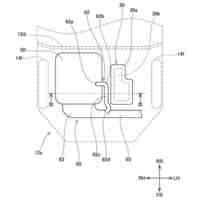
実施形態に係る移動体1から各平面までの距離の一例を示す図である。
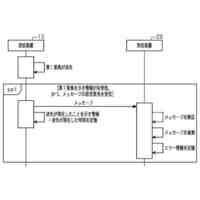
実施形態に係る情報処理装置のハードウェア構成例を示す図である。
【発明を実施するための形態】
【0010】
本開示の原理は、いくつかの例示的な実施形態を参照して説明される。これらの実施形態は、例示のみを目的として記載されており、本開示の範囲に関する制限を示唆することなく、当業者が本開示を理解および実施するのを助けることを理解されたい。本明細書で説明される開示は、以下で説明されるもの以外の様々な方法で実装される。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
電池
8日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
12日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
9日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
車両
8日前
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
電動車
9日前
トヨタ自動車株式会社
モータ
12日前
トヨタ自動車株式会社
負極層
12日前
トヨタ自動車株式会社
電動車
12日前
トヨタ自動車株式会社
送電装置
1日前
トヨタ自動車株式会社
蓄電セル
8日前
トヨタ自動車株式会社
充電装置
12日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
制御装置
12日前
トヨタ自動車株式会社
駆動装置
12日前
トヨタ自動車株式会社
電源装置
1日前
トヨタ自動車株式会社
内燃機関
8日前
トヨタ自動車株式会社
通信装置
1日前
トヨタ自動車株式会社
路側装置
12日前
トヨタ自動車株式会社
給電装置
9日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
更新装置
5日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
制御装置
9日前
トヨタ自動車株式会社
報知装置
9日前
トヨタ自動車株式会社
ステータ
2日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ