TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059618
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023169825
出願日
2023-09-29
発明の名称
搬送車
出願人
株式会社ダイヘン
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20250403BHJP(制御;調整)
要約
【課題】狭い場所での走行性を向上させることができる搬送車を提供する。
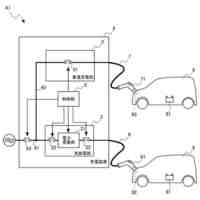
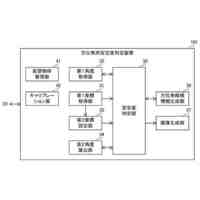
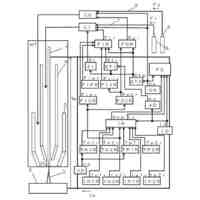
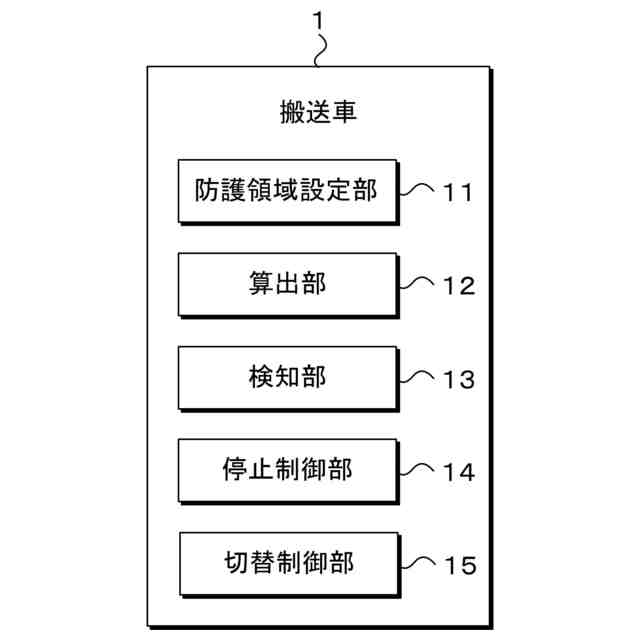
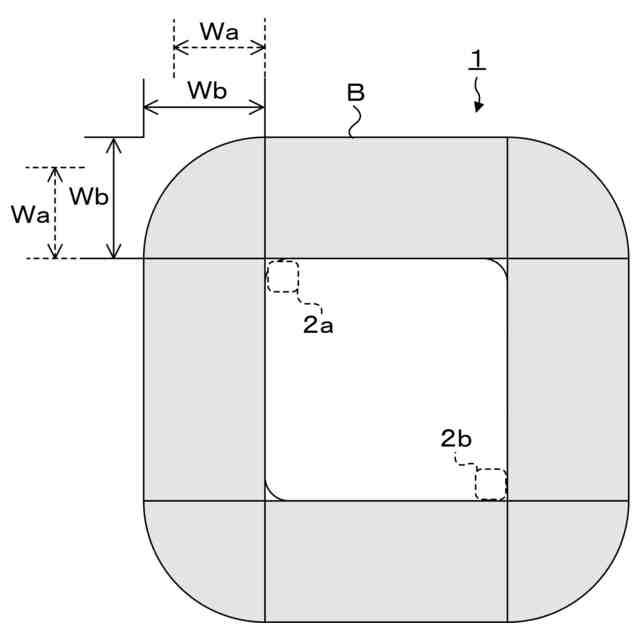
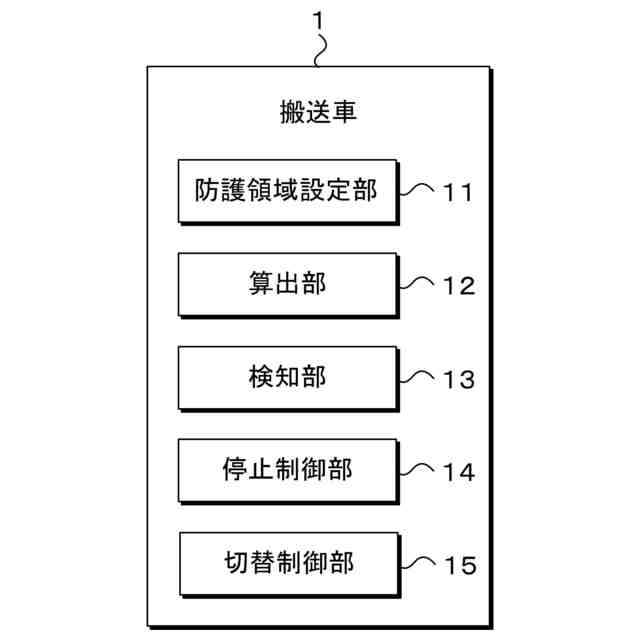
【解決手段】搬送車1は、車体の周囲に防護領域を設ける防護領域設定部11と、車体の速度を算出する算出部12と、防護領域の範囲内に物体が検知された場合に、車体を停止させる停止制御部14と、少なくとも車体の速度に基づいて、車体の周縁から防護領域を張り出させる幅を切り替える切替制御部15と、を備える。
【選択図】図5
特許請求の範囲
【請求項1】
車体の周囲に防護領域を設ける防護領域設定部と、
前記車体の速度を算出する算出部と、
前記防護領域の範囲内に物体が検知された場合に、前記車体を停止させる停止制御部と、
少なくとも前記車体の速度に基づいて、前記車体の周縁から前記防護領域を張り出させる幅を切り替える切替制御部と、
を備える搬送車。
続きを表示(約 410 文字)
【請求項2】
前記防護領域の幅は、前記防護領域の範囲内に物体が検知された場合に、前記車体が物体に衝突することなく停止できる距離を確保できる長さに設定される、
請求項1記載の搬送車。
【請求項3】
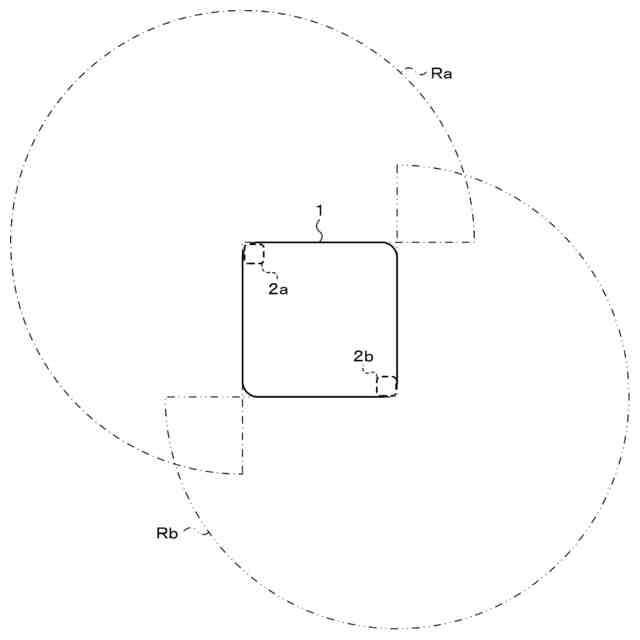
前記防護領域は、前記車体の周辺に存在し得る物体までの距離を測定するセンサの走査範囲内に設けられる、
請求項1記載の搬送車。
【請求項4】
前記センサにより測定された物体までの距離に基づいて、前記防護領域の範囲内に物体があることを検知する検知部をさらに備える、
請求項3記載の搬送車。
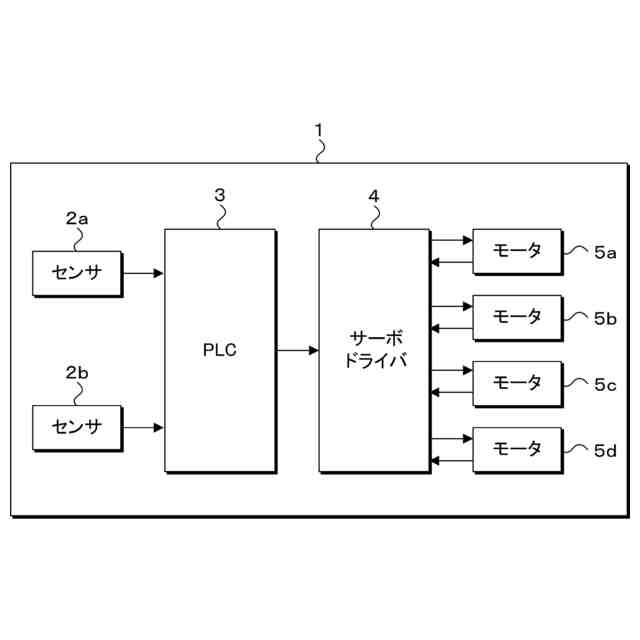
【請求項5】
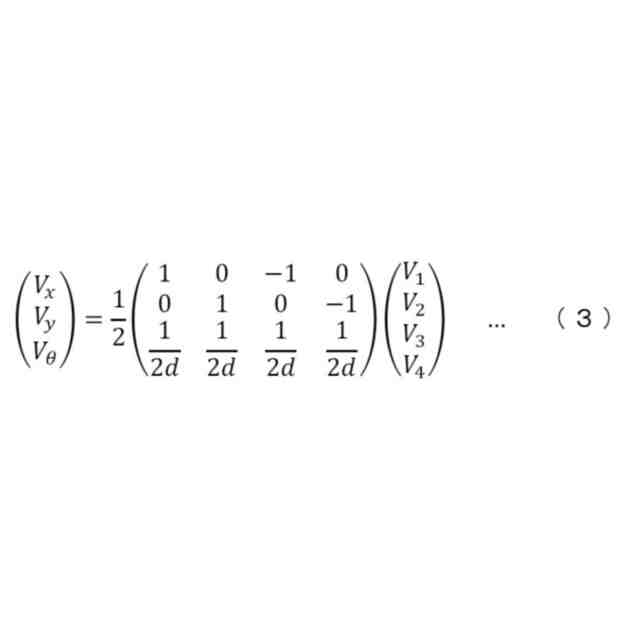
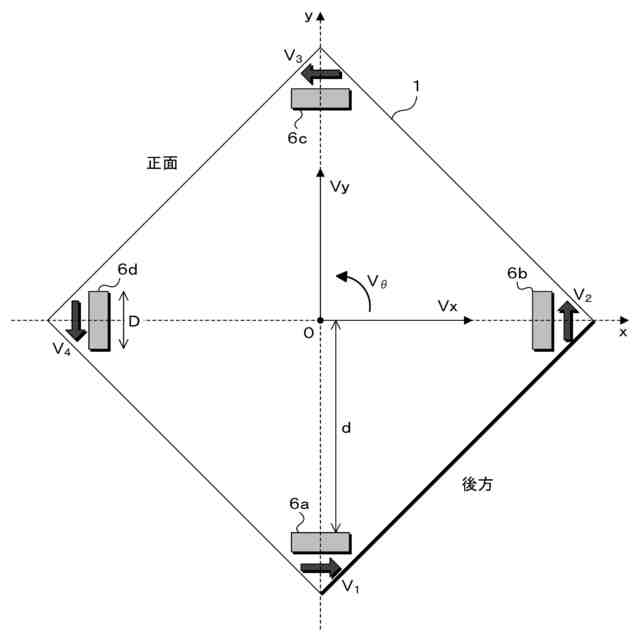
前記車体の移動機構に含まれる複数のモータと、
前記モータの動作状況をそれぞれ検出する複数のエンコーダと、
をさらに備え、
前記算出部は、前記エンコーダの出力値に基づいて、前記車体の速度を算出する、
請求項1記載の搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行可能な搬送車に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
下記特許文献1には、床面を無人で走行する無人搬送車(AGV:Automatic Guided Vehicle)が開示されている。この無人搬送車は、前後左右の各側面にレーザースキャナを配置し、それぞれのレーザースキャナが矩形状のセンシング領域を無人搬送車の前後左右に設ける。各センシング領域には、その領域内のうち内側に設けられる防護領域と、防護領域の外側に設けられる警告領域とが含まれる。警告領域に作業者が進入すると、無人搬送車が減速し、防護領域に作業者が進入すると、無人搬送車が停止する。
【先行技術文献】
【特許文献】
【0003】
特許第7137609号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、無人搬送車の前後左右に防護領域を設ける場合、車体の両側に設けられる防護領域の幅と、車体自体の幅と、を加算した幅よりも広い幅の通路を確保する必要がある。しかし、このような幅を確保できない狭い場所もあり、このような狭い場所を無人搬送車に走行させると、防護領域内で物体が検知され、無人搬送車が停止してしまう。
【0005】
そこで、本発明は、狭い場所での走行性を向上させることができる搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
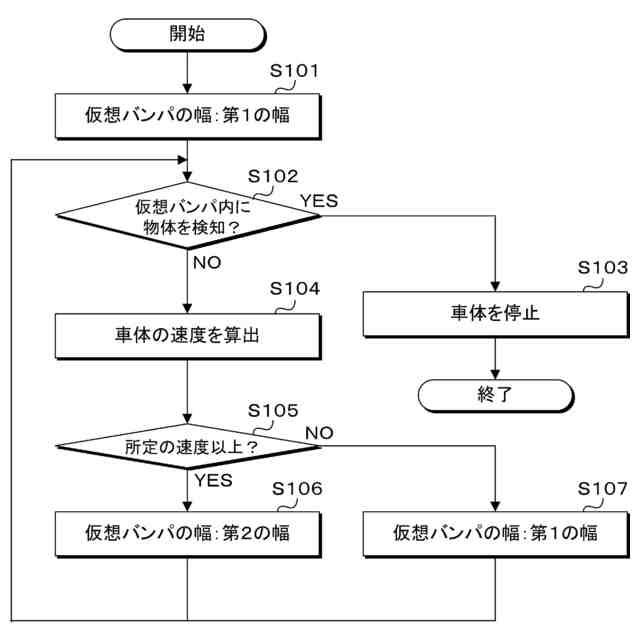
本発明の一態様による搬送車は、車体の周囲に防護領域を設ける防護領域設定部と、車体の速度を算出する算出部と、防護領域の範囲内に物体が検知された場合に、車体を停止させる停止制御部と、少なくとも車体の速度に基づいて、車体の周縁から防護領域を張り出させる幅を切り替える切替制御部と、を備える。
【0007】
この態様によれば、車体の周囲に設ける防護領域の幅を車体の速度に基づいて切り替えることができ、その防護領域の範囲内に物体が検知されたときに、車体を停止させることができる。これにより、例えば、狭い場所を走行するときに車体の速度を落すと、防護領域の幅を縮めることが可能となる。
【0008】
上記態様において、防護領域の幅は、防護領域の範囲内に物体が検知された場合に、車体が物体に衝突することなく停止できる距離を確保できる長さに設定されてもよい。
【0009】
この態様によれば、防護領域の範囲内に物体が検知されたときに、その物体に車体を衝突させることなく、確実に停止させることが可能となる。
【0010】
上記態様において、防護領域は、車体の周辺に存在し得る物体までの距離を測定するセンサの走査範囲内に設けられてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
変圧器
16日前
株式会社ダイヘン
移動体
1か月前
株式会社ダイヘン
搬送装置
1か月前
株式会社ダイヘン
溶接装置
26日前
株式会社ダイヘン
溶接装置
26日前
株式会社ダイヘン
電源装置
3日前
株式会社ダイヘン
充電装置
1か月前
株式会社ダイヘン
溶接トーチ
1か月前
株式会社ダイヘン
溶接トーチ
26日前
株式会社ダイヘン
溶接トーチ
26日前
株式会社ダイヘン
溶接トーチ
25日前
株式会社ダイヘン
溶接電源装置
8日前
株式会社ダイヘン
固相接合装置
10日前
株式会社ダイヘン
溶接電源装置
10日前
株式会社ダイヘン
電力システム
1か月前
株式会社ダイヘン
直流電源回路
25日前
株式会社ダイヘン
高周波電源装置
16日前
株式会社ダイヘン
安定度向上装置
25日前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイヘン
フラックス回収装置
24日前
株式会社ダイヘン
サブマージアーク溶接機
26日前
株式会社ダイヘン
コイル及び電力授受装置
1日前
株式会社ダイヘン
サブマージアーク溶接機
24日前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
パルスアーク溶接制御方法
2日前
株式会社ダイヘン
パルスアーク溶接制御方法
2日前
株式会社ダイヘン
パルスアーク溶接制御方法
2日前
株式会社ダイヘン
パルスアーク溶接制御方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
2重シールドティグ溶接方法
1か月前
株式会社ダイヘン
吸引ノズルおよびその製造方法
24日前
株式会社ダイヘン
固相接合装置および固相接合方法
10日前
東北電力株式会社
電圧調整装置
1か月前
株式会社ダイヘン
制御回路、および、蓄電池システム
10日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ