TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025065596
公報種別
公開特許公報(A)
公開日
2025-04-22
出願番号
2023174885
出願日
2023-10-10
発明の名称
走行制御装置
出願人
株式会社やまびこ
代理人
弁理士法人IPX
主分類
G05D
1/43 20240101AFI20250415BHJP(制御;調整)
要約
【課題】車両に後付けされるセンサの揺れを抑制することが可能な走行制御装置等を提供する。
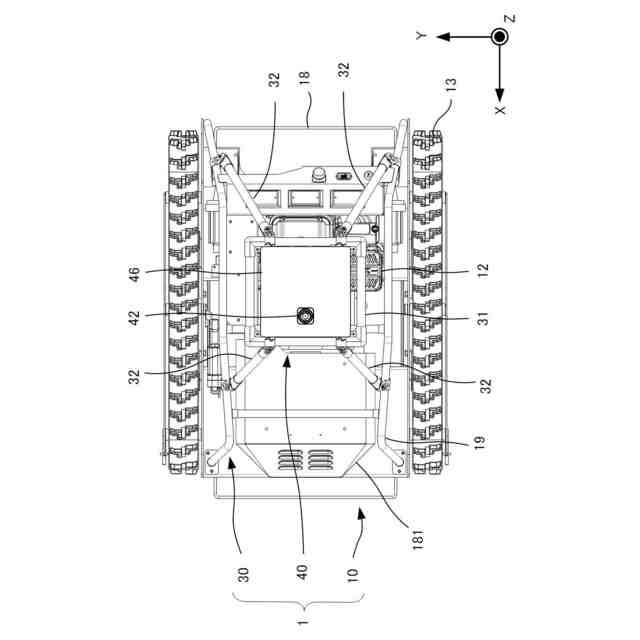
【解決手段】本発明の一態様によれば、走行制御装置が提供される。この走行制御装置は、車両に取り付けられる筐体と、筐体に取り付けられ、電磁波を出射して障害物を検出するセンサと、センサの検出結果に基づいて車両の走行を制御するための回路とを備える。センサは、車両の重心となり得る領域の鉛直上方に配置される。
【選択図】図1
特許請求の範囲
【請求項1】
走行制御装置であって、
車両に取り付けられる筐体と、
前記筐体に取り付けられ、電磁波を出射して障害物を検出するセンサと、
前記センサの検出結果に基づいて前記車両の走行を制御するための回路と
を備え、
前記センサは、前記車両の重心となり得る領域の鉛直上方に配置される、
走行制御装置。
続きを表示(約 950 文字)
【請求項2】
請求項1に記載の走行制御装置において、
前記電磁波は、前記センサを起点として照射範囲を広げながら進行し、
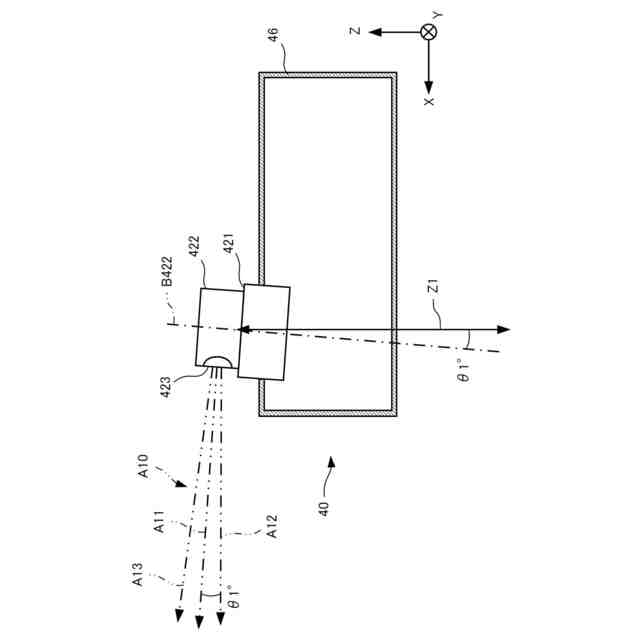
前記センサは、前記車両の前方において、照射範囲が広がる前記電磁波の下端が地面に当たらない向きで設けられる、
走行制御装置。
【請求項3】
請求項1に記載の走行制御装置において、
前記筐体は、鉛直上方に板状部材を有する箱の形状をしており、
前記板状部材には、前記センサの形状をした孔が設けられており、
前記センサは、前記孔に差し込まれて固定され、前記筐体の内部で配線を介して前記回路と接続される、
走行制御装置。
【請求項4】
請求項1に記載の走行制御装置において、
前記センサは、所定のマーカーの位置を検出する機能を有し、
前記マーカーは、前記車両が走行する領域の境界の付近に設置され、
前記回路は、前記センサが検出した前記マーカーの位置の付近を境界とする領域の内部を走行させるように前記車両を制御し、
前記センサは、前記マーカーの上端よりも低い位置に設けられる、
走行制御装置。
【請求項5】
請求項1に記載の走行制御装置において、
前記センサは、水平方向に沿った所定範囲の方向に前記電磁波を出射する部分を有し、前記車両及び前記筐体の中で最も高い位置にある上端よりも前記部分が高い位置に設けられる、
走行制御装置。
【請求項6】
請求項1に記載の走行制御装置において、
前記センサは、所定のビーコンからの信号を検出する機能を有し、
前記ビーコンは、前記車両が走行する領域の境界に設置され、
前記回路は、前記センサが検出した前記信号が示す前記ビーコンの位置を境界とする領域の内部を走行させるように前記車両を制御する、
走行制御装置。
【請求項7】
請求項1に記載の走行制御装置において、
前記センサは、前記車両の位置を検出する機能を有し、
前記回路は、前記センサが検出した位置に基づいて前記車両の走行を制御する、
走行制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行制御装置に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、自律走行モードと遠隔操縦モードとを切り替え可能に構成された複数の自動運転車両を遠隔監視するために使用される制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-179577号
【発明の概要】
【発明が解決しようとする課題】
【0004】
自律走行のためにはLiDAR等の障害物を検出するセンサを備えなければならないが、車両に後付けでそのようなセンサを追加する場合、車両の振動によってセンサも大きく揺れてしまうことになりやすい。
【0005】
本発明では上記事情に鑑み、車両に後付けされるセンサの揺れを抑制することが可能な走行制御装置等を提供することとした。
【課題を解決するための手段】
【0006】
本発明の一態様によれば、走行制御装置が提供される。この走行制御装置は、車両に取り付けられる筐体と、筐体に取り付けられ、電磁波を出射して障害物を検出するセンサと、センサの検出結果に基づいて車両の走行を制御するための回路とを備える。センサは、車両の重心となり得る領域の鉛直上方に配置される。
【0007】
このような態様によれば、車両に後付けされるセンサの揺れを抑制することができる。
【図面の簡単な説明】
【0008】
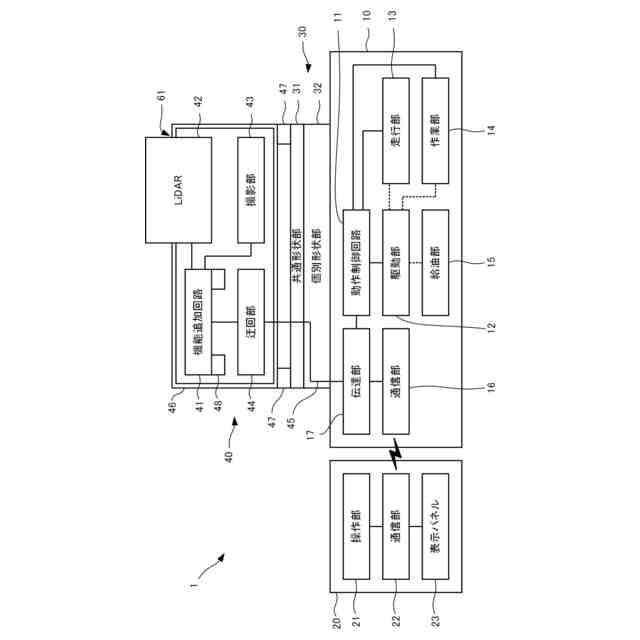
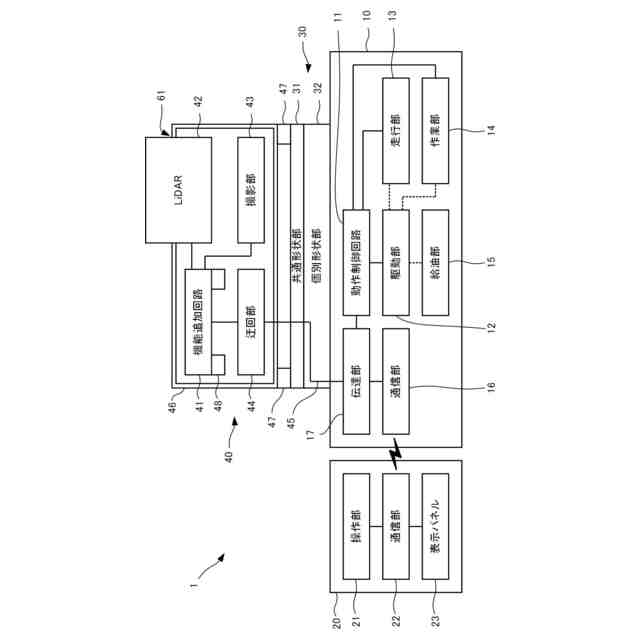
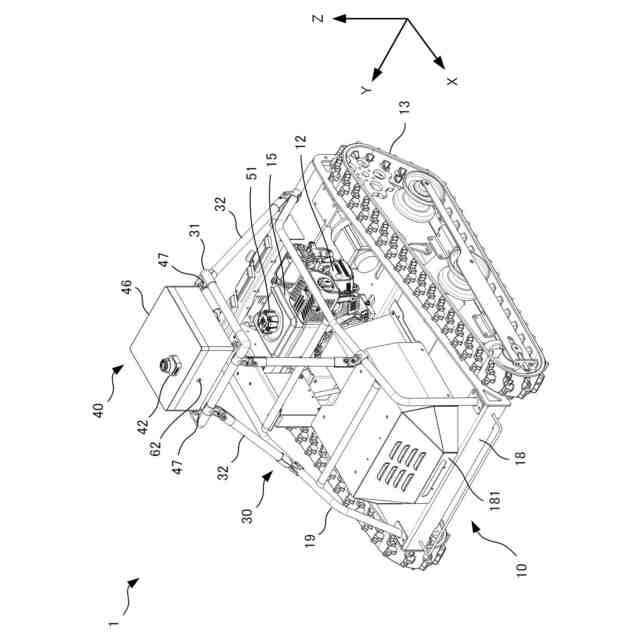
車両システム1の全体構成の一例を示す図である。
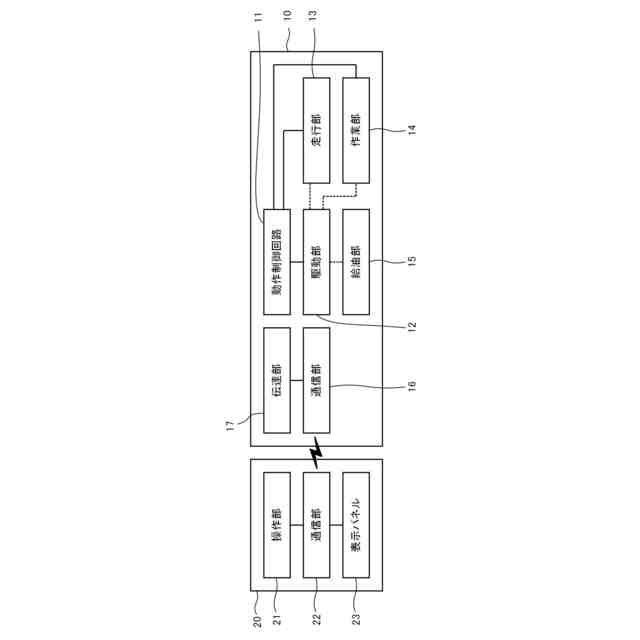
車両10及びリモコン20の構成の一例を示す図である。
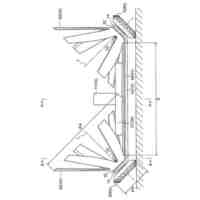
車両システム1の斜視図である。
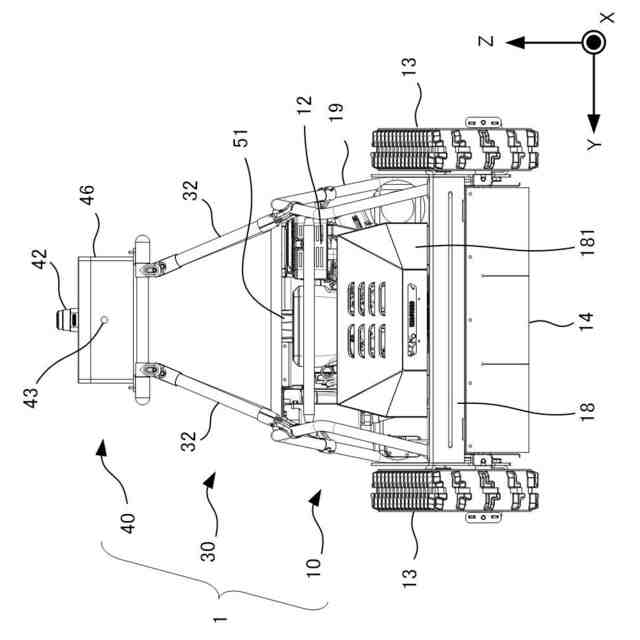
車両システム1の正面図である。
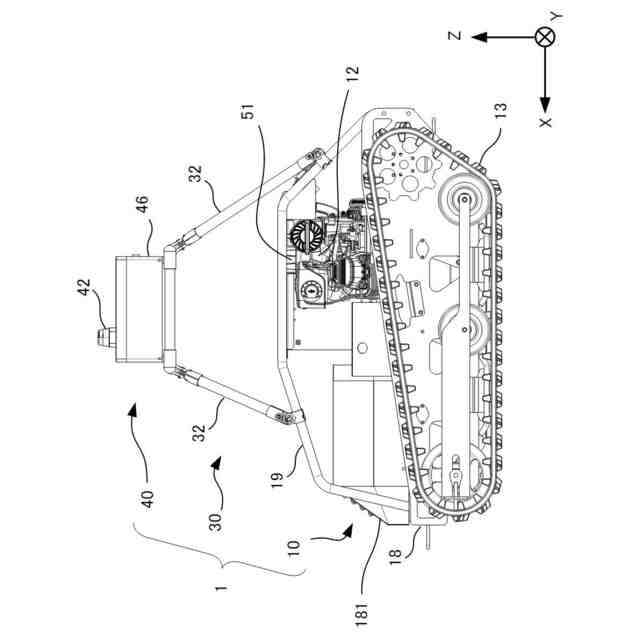
車両システム1の側面図である。
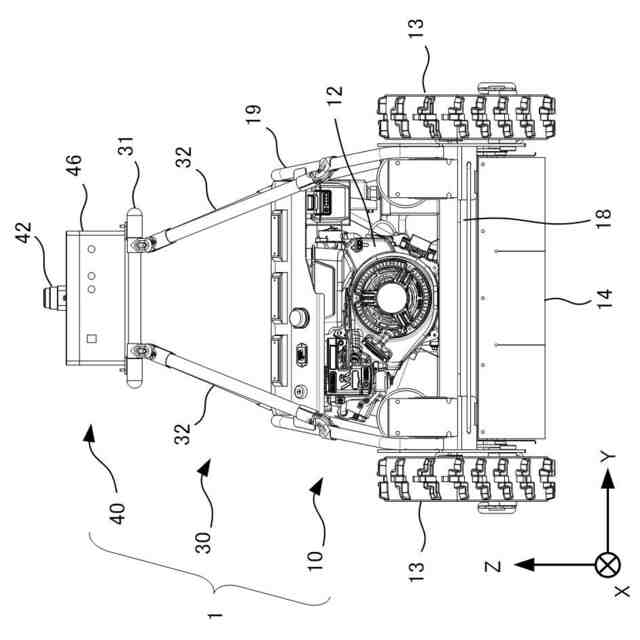
車両システム1の背面図である。
車両システム1の平面図である。
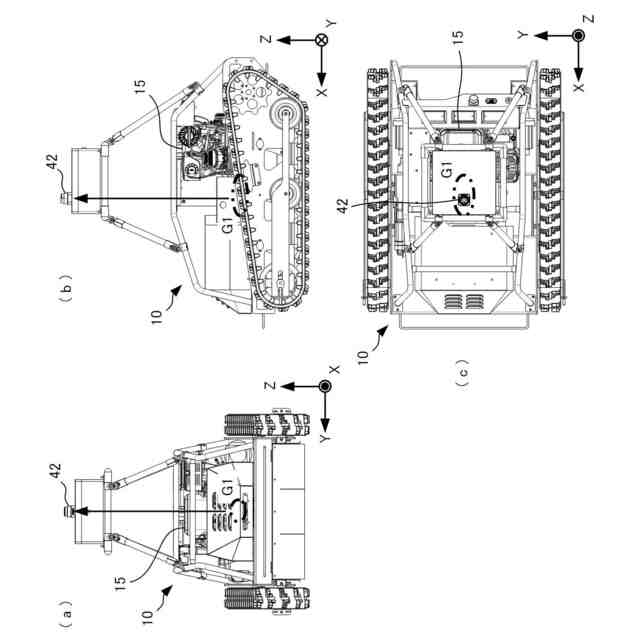
LiDAR42の取り付け位置を示す図である。
筐体46に取り付けられたLiDAR42の一例を示す図である。
LiDAR42の筐体46への取り付け方法を示す図である。
マーカーが設置された領域の一例を示す図である。
筐体46aに取り付けられたLiDAR42の一例を示す図である。
筐体46bに取り付けられたLiDAR42の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を用いて本発明の実施形態について説明する。以下に示す実施形態中で示した各種特徴事項は、互いに組み合わせ可能である。
【0010】
<実施形態>
図1は、車両システム1の全体構成の一例を示す図である。車両システム1は、車両を走行させて所定の作業を行わせるためのシステムである。所定の作業とは、例えば、畑等の所定の領域における草刈りの作業である。車両システム1は、車両10と、リモコン20と、取付部材30と、機能追加装置40とを備える。このうちの車両10及びリモコン20は、既存の製品であり、取付部材30及び機能追加装置40を後から取り付けることで車両システム1として構成される。以下ではまず既存の製品の部分について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社やまびこ
草刈機
3か月前
株式会社やまびこ
バッテリー溶接機
1か月前
個人
生産早送り装置
今日
株式会社FUJI
工作機械
1か月前
エイブリック株式会社
基準電圧回路
4か月前
株式会社ダイヘン
移動体
1か月前
株式会社FUJI
加工機械ライン
25日前
株式会社クボタ
作業車
4か月前
個人
作業車両自動化システム
6日前
ローム株式会社
半導体集積回路
2か月前
愛知製鋼株式会社
目標軌跡の設定方法
14日前
株式会社ダイフク
搬送車
4か月前
エイブリック株式会社
ボルテージレギュレータ
4か月前
トヨタ自動車株式会社
生産管理システム
11日前
三栄ハイテックス株式会社
基準電圧回路
2か月前
株式会社ダイフク
搬送設備
4日前
株式会社ダイフク
搬送設備
1か月前
株式会社ダイフク
搬送設備
2か月前
トヨタ自動車株式会社
移動制御システム
今日
トヨタ自動車株式会社
ペダル機構
2か月前
株式会社オプトン
制御プログラム生成装置
1か月前
キヤノン電子株式会社
加工装置、及び、制御方法
1か月前
トヨタ自動車株式会社
減圧弁
8日前
三菱電機株式会社
自己位置推定装置
3か月前
株式会社鷺宮製作所
制御装置
1か月前
トヨタ自動車株式会社
工作機械の制御装置
4か月前
トヨタ自動車株式会社
工作機械の制御装置
4か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイヘン
負荷時タップ切換器
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
2か月前
マーク ヘイリー
消防ロボット
18日前
株式会社ダイフク
物品搬送設備
1か月前
株式会社ダイフク
物品搬送設備
4か月前
株式会社やまびこ
走行制御装置
3か月前
トヨタ自動車株式会社
移動体、及び制御方法
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ