TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025056660
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023166270
出願日
2023-09-27
発明の名称
工作機械の制御装置
出願人
トヨタ自動車株式会社
代理人
個人
主分類
G05B
19/18 20060101AFI20250401BHJP(制御;調整)
要約
【課題】計測データの取得に異常が発生した場合であっても、作業者の負担を軽減し、計測データの消失を防ぐことができる工作機械の制御装置を提供することを課題とする。
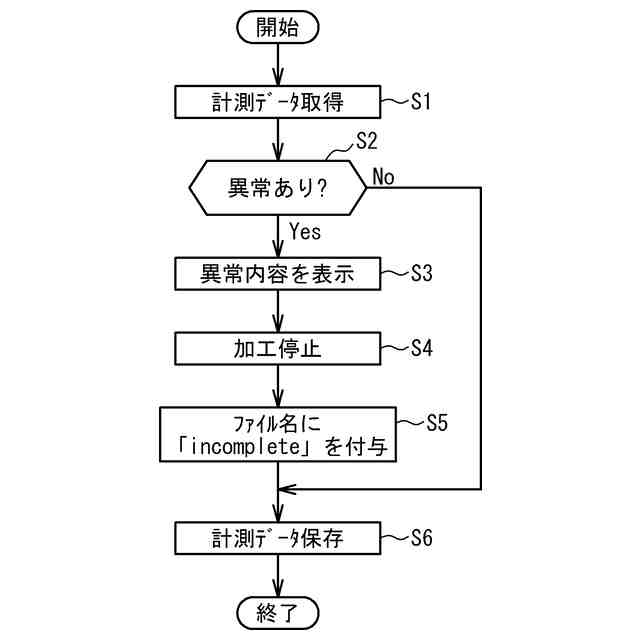
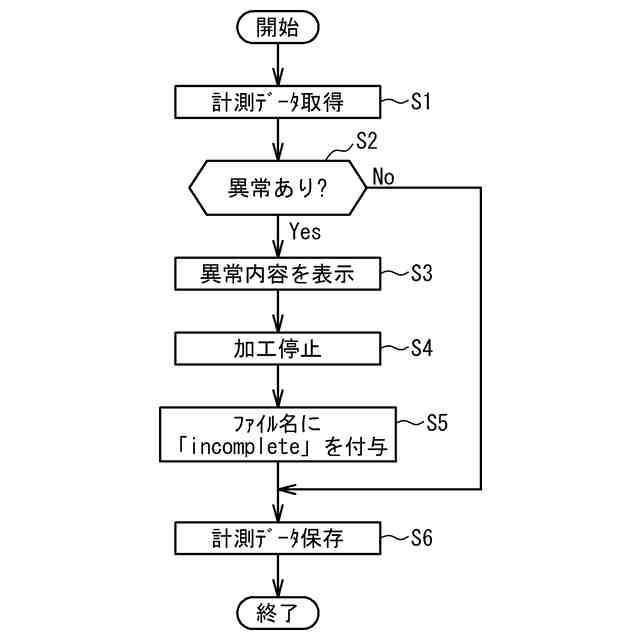
【解決手段】加工プログラムに従って加工工具を駆動して加工工程を実施する工作機械の制御装置であって、前記加工工具の駆動に関する計測データを取得する取得部と、前記計測データの取得に異常が発生したか否かを判定する判定部と、前記判定部により肯定判定がなされた場合に、記計測データの取得に異常が発生した旨を表示部に表示させる表示制御部と、前記判定部により肯定判定がなされた場合に、前記計測データのファイル名に異常が発生したことを示す文字列を付与して、前記計測データのファイルを記憶装置に保存する保存部と、を備えた工作機械の制御装置。
【選択図】図2
特許請求の範囲
【請求項1】
加工プログラムに従って加工工具を駆動して加工工程を実施する工作機械の制御装置であって、
前記加工工具の駆動に関する計測データを取得する取得部と、
前記計測データの取得に異常が発生したか否かを判定する判定部と、
前記判定部により肯定判定がなされた場合に、前記計測データの取得に異常が発生した旨を表示部に表示させる表示制御部と、
前記判定部により肯定判定がなされた場合に、前記計測データのファイル名に異常が発生したことを示す文字列を付与して、前記計測データのファイルを記憶装置に保存する保存部と、を備えた工作機械の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、工作機械の制御装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
加工プログラムに従って加工工具を駆動して加工工程を実施する工作機械がある。このような工作機械の制御装置は、加工工具の駆動に関する計測データを取得し、取得した計測データに基づいて加工工程に関して発生した異常の内容をファイルに保存する(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特公平07-098289号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
計測データの取得自体に異常が発生した場合、作業者がこのような異常の発生を認識するためには、ファイルに保存された計測データを確認したうえで計測データに基づいて判断する必要がある。このように作業者の負担が大きい。また、このような異常が発生した場合、計測データが消失するおそれもある。以上のように上記の技術では、計測データの取得自体に異常が発生した場合については考慮されていない。
【0005】
そこで本発明は、計測データの取得に異常が発生した場合であっても、作業者の負担を軽減し、計測データの消失を防ぐことができる工作機械の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的は、加工プログラムに従って加工工具を駆動して加工工程を実施する工作機械の制御装置であって、前記加工工具の駆動に関する計測データを取得する取得部と、前記計測データの取得に異常が発生したか否かを判定する判定部と、前記判定部により肯定判定がなされた場合に、異常が発生した旨を表示部に表示させる表示制御部と、前記判定部により肯定判定がなされた場合に、前記計測データのファイル名に異常が発生したことを示す文字列を付与して、前記計測データのファイルを記憶装置に保存する保存部と、を備えた工作機械の制御装置によって達成できる。
【発明の効果】
【0007】
本発明によれば、計測データの取得に異常が発生した場合であっても、作業者の負担を軽減し、計測データの消失を防ぐことができる工作機械の制御装置を提供できる。
【図面の簡単な説明】
【0008】
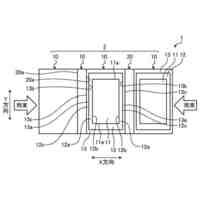
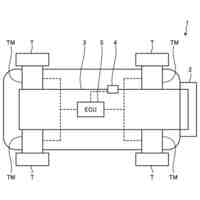
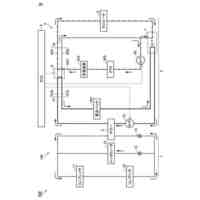
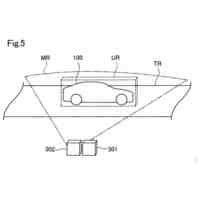
工作機械の模式図である。
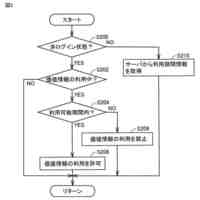
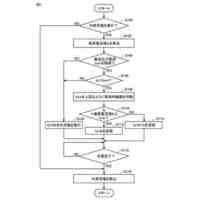
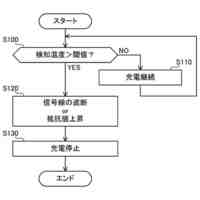
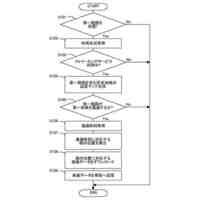
計測データ収集制御を例示したフローチャートである。
【発明を実施するための形態】
【0009】
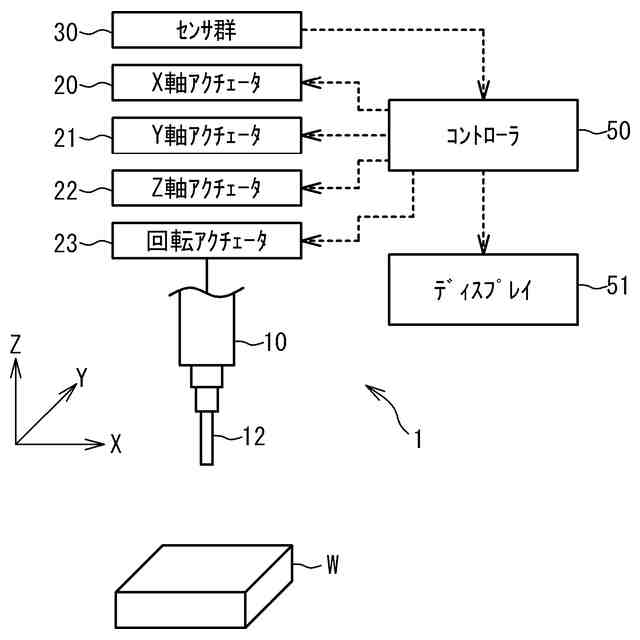
図1は、工作機械1の模式図である。工作機械1は例えばマシニングセンタである。工作機械1は、主軸10、加工工具12、X軸アクチュエータ20、Y軸アクチュエータ21、Z軸アクチュエータ22、回転アクチュエータ23、センサ群30、コントローラ50、及びディスプレイ51を含む。加工工具12は主軸10の先端に取り付けられている。加工工具12はZ軸方向に沿って延びている。加工工具12は、例えばフライスなどの切削加工具である。加工工具12による加工対象物Wへの加工としては、例えば、切削、研削、仕上加工(研磨)、穴あけ、バリ取りなどが挙げられる。
【0010】
X軸アクチュエータ20、Y軸アクチュエータ21、及びZ軸アクチュエータ22は、それぞれ主軸10と共に加工工具12をX軸方向、Y軸方向、Z軸方向に移動させる。回転アクチュエータ23は、加工工具12のZ軸方向に沿って延びた中心軸周りに加工工具12を回転させる。尚、X軸方向、Y軸方向、Z軸方向は互いに直交している。Z軸方向は鉛直方向に平行である。X軸方向及びY軸方向は、共に水平方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
端末
3日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
組電池
3日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
組電池
2日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
水系電池
7日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
防曇装置
7日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
内燃機関
7日前
トヨタ自動車株式会社
空気軸受
1日前
トヨタ自動車株式会社
冷却装置
2日前
トヨタ自動車株式会社
溶接ヘッド
2日前
トヨタ自動車株式会社
電池パック
7日前
トヨタ自動車株式会社
溶接ヘッド
3日前
トヨタ自動車株式会社
電池パック
2日前
トヨタ自動車株式会社
誘導電動機
7日前
トヨタ自動車株式会社
溶媒回収装置
1日前
トヨタ自動車株式会社
変換アダプタ
3日前
トヨタ自動車株式会社
配車管理装置
3日前
トヨタ自動車株式会社
地図表示装置
4日前
トヨタ自動車株式会社
駐車支援装置
2日前
トヨタ自動車株式会社
冷却システム
2日前
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
地図表示装置
3日前
トヨタ自動車株式会社
情報処理装置
4日前
トヨタ自動車株式会社
情報処理装置
7日前
トヨタ自動車株式会社
段差検出装置
1日前
トヨタ自動車株式会社
車載用制御装置
2日前
トヨタ自動車株式会社
装置および方法
2日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ