TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025089088
公報種別
公開特許公報(A)
公開日
2025-06-12
出願番号
2023204072
出願日
2023-12-01
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
40/105 20120101AFI20250605BHJP(車両一般)
要約
【課題】車輪がスリップ状態となる場合でも車体速を精度よく推定することができる車両制御装置を提供すること。
【解決手段】車輪速と車体速とに基づいて車輪ごとにスリップ状態であるか否かを判定するスリップ判定部と、前記スリップ状態であると判定された車輪の数に応じて補正量を変化させるとともに、加速度センサにより検出された加速度センサ値を前記補正量に基づいて補正する加速度センサ補正部と、前記補正量に基づいて補正された補正後加速度を積分した積分値を用いて前記車体速を推定する車体速推定部とを備えることを特徴とする。
【選択図】図2
特許請求の範囲
【請求項1】
車輪速と車体速とに基づいて車輪ごとにスリップ状態であるか否かを判定するスリップ判定部と、
前記スリップ状態であると判定された車輪の数に応じて補正量を変化させるとともに、加速度センサにより検出された加速度センサ値を前記補正量に基づいて補正する加速度センサ補正部と、
前記補正量に基づいて補正された補正後加速度を積分した積分値を用いて前記車体速を推定する車体速推定部と
を備えることを特徴とする車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、複数の車輪のうちのいずれか一つがスリップ状態であると判定された場合は、車輪速を用いずに加速度センサにより検出した加速度センサ値を用いて車体速を推定することが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2011-37338号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
車両が砂地や泥寧路を走行する際、いずれかの車輪はスリップ状態となることが想定される。そのため、特許文献1に記載の構成では、車両が砂地などを走行する場合には加速度センサへの依存度が高くなり、加速度センサ値の低周波成分の誤差影響が強く表れてしまい、車体速の推定誤差が大きくなる虞がある。
【0005】
本発明は、上記事情に鑑みてなされたものであって、車輪がスリップ状態となる場合でも車体速を精度よく推定することができる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、車輪速と車体速とに基づいて車輪ごとにスリップ状態であるか否かを判定するスリップ判定部と、前記スリップ状態であると判定された車輪の数に応じて補正量を変化させるとともに、加速度センサにより検出された加速度センサ値を前記補正量に基づいて補正する加速度センサ補正部と、前記補正量に基づいて補正された補正後加速度を積分した積分値を用いて前記車体速を推定する車体速推定部とを備えることを特徴とする。
【発明の効果】
【0007】
本発明では、車輪がスリップ状態となる場合でも車体速を精度よく推定することができる。
【図面の簡単な説明】
【0008】
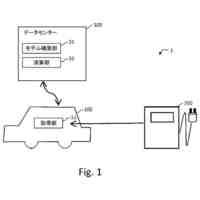
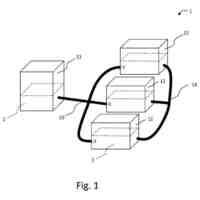
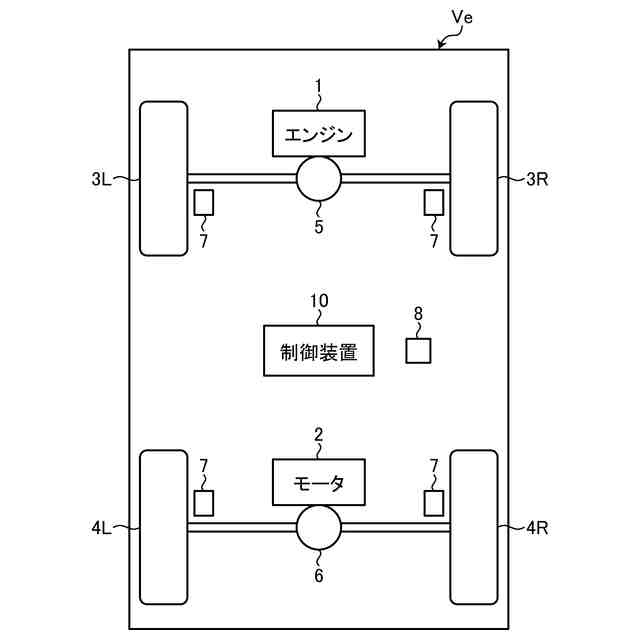
図1は、実施形態における車両を示す模式図である。
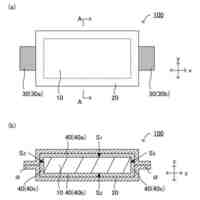
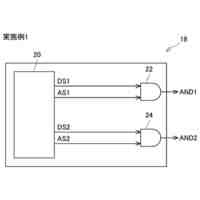
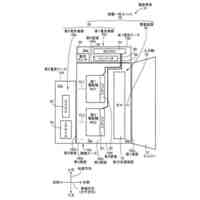
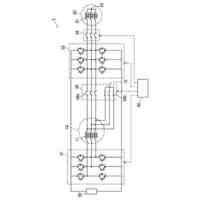
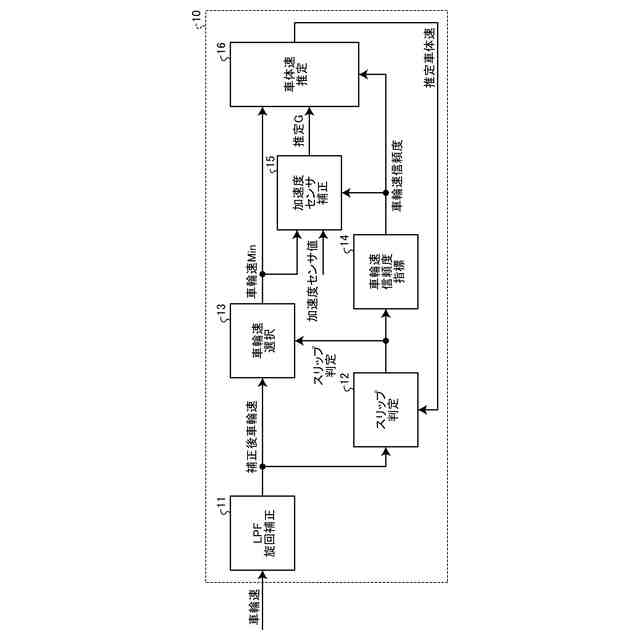
図2は、制御装置を説明するためのブロック図である。
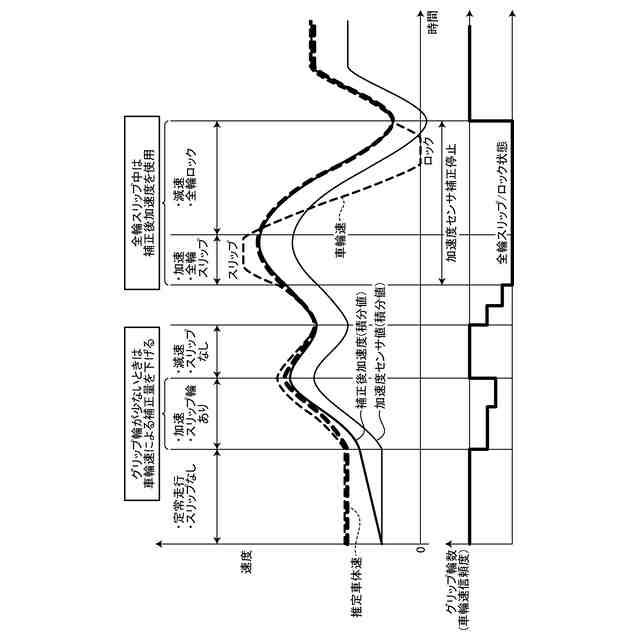
図3は、加速度センサ値を補正した補正後加速度を用いて車体速を推定した場合を説明するためのグラフ図である。
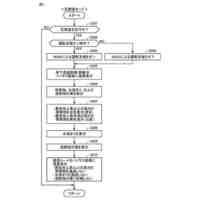
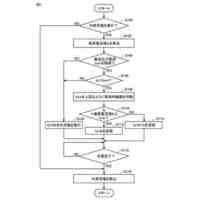
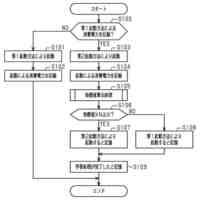
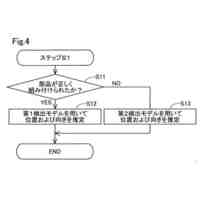
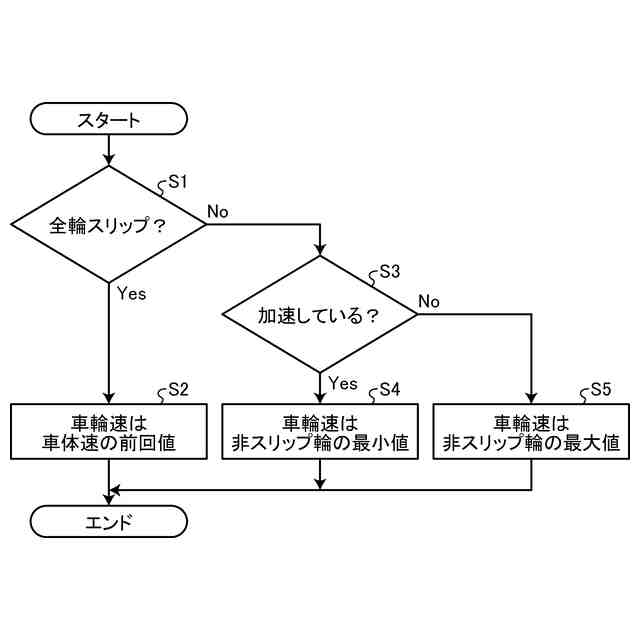
図4は、車輪速選択処理の一例を示すフローチャート図である。
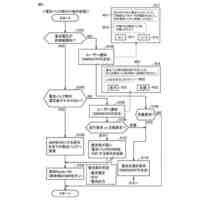
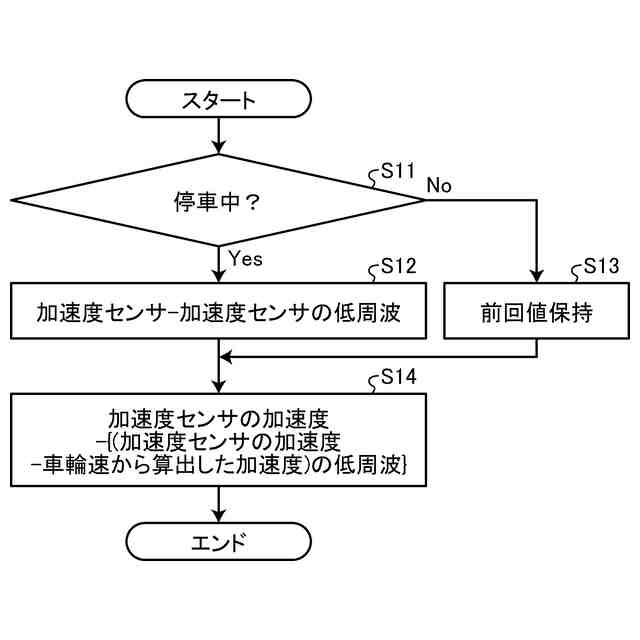
図5は、加速度センサ補正処理の一例を示すフローチャート図である。
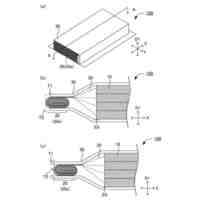
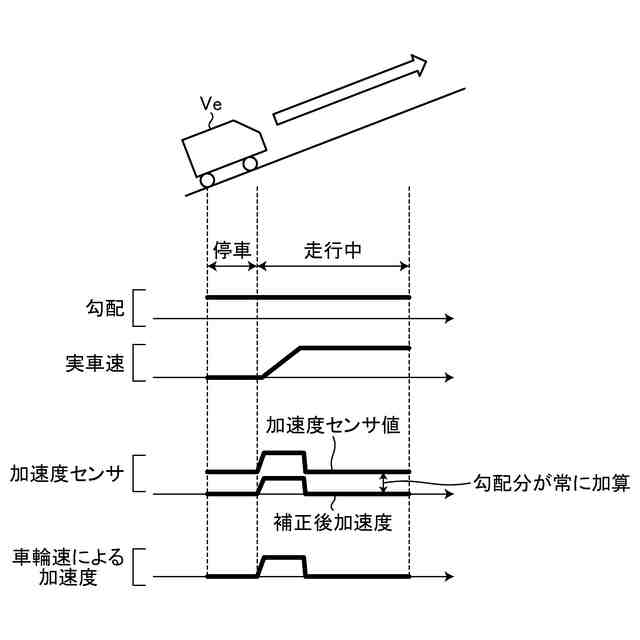
図6は、車輪速による加速度に基づいて加速度センサのゼロ点補正する場合の一例を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態における車両制御装置について具体的に説明する。なお、本発明は以下に説明する実施形態に限定されるものではない。
【0010】
図1は、実施形態における車両を示す模式図である。車両Veは、前輪用の動力源であるエンジン1と、後輪用の動力源であるモータ2と、制御装置10とを備えている。車両Veは四輪駆動車であり、エンジン1が左右の前輪3L,3Rを駆動し、モータ2が左右の後輪4L,4Rを駆動する。エンジン1はデファレンシャルギヤ機構5を介して前輪3L,3Rと動力伝達可能に接続されている。モータ2は永久磁石式の同期モータにより構成され、電動機および発電機として機能するモータジェネレータである。モータ2はデファレンシャルギヤ機構6を介して後輪4L,4Rと動力伝達可能に接続されている。車両Veは前輪3L,3Rおよび後輪4L,4Rで駆動する四輪駆動状態で走行可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
21日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車両
17日前
トヨタ自動車株式会社
方法
4日前
トヨタ自動車株式会社
電池
23日前
トヨタ自動車株式会社
車両
14日前
トヨタ自動車株式会社
電池
17日前
トヨタ自動車株式会社
車両
18日前
トヨタ自動車株式会社
車両
3日前
トヨタ自動車株式会社
端末
3日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
組電池
3日前
トヨタ自動車株式会社
モータ
11日前
トヨタ自動車株式会社
組電池
2日前
トヨタ自動車株式会社
モータ
11日前
トヨタ自動車株式会社
モータ
10日前
トヨタ自動車株式会社
モータ
8日前
トヨタ自動車株式会社
パネル
10日前
トヨタ自動車株式会社
電動車
3日前
トヨタ自動車株式会社
予測方法
16日前
トヨタ自動車株式会社
電動車両
14日前
トヨタ自動車株式会社
管理装置
21日前
トヨタ自動車株式会社
表示装置
21日前
トヨタ自動車株式会社
蓄電装置
17日前
トヨタ自動車株式会社
二次電池
16日前
トヨタ自動車株式会社
防曇装置
7日前
トヨタ自動車株式会社
制御装置
18日前
トヨタ自動車株式会社
駆動装置
7日前
トヨタ自動車株式会社
水系電池
7日前
トヨタ自動車株式会社
電源装置
10日前
トヨタ自動車株式会社
二次電池
3日前
トヨタ自動車株式会社
関節機構
16日前
トヨタ自動車株式会社
蓄電装置
3日前
トヨタ自動車株式会社
二次電池
14日前
トヨタ自動車株式会社
燃料電池
4日前
トヨタ自動車株式会社
ステータ
18日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ