TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025053969
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023163113
出願日
2023-09-26
発明の名称
作業車
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
G05G
1/015 20080401AFI20250331BHJP(制御;調整)
要約
【課題】作業車において、人為操作具の操作位置をポテンショメータにより検出する場合に、ポテンショメータの検出範囲を有効に使用する。
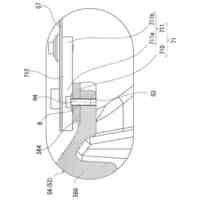
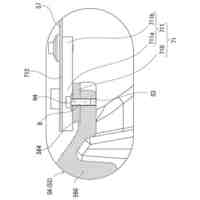
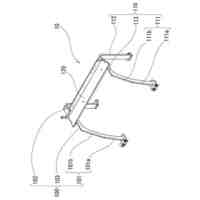
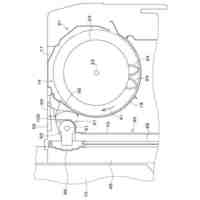
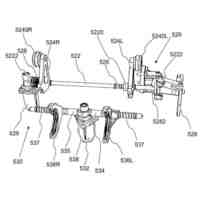
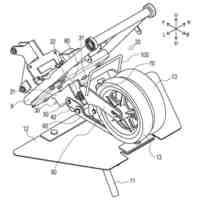
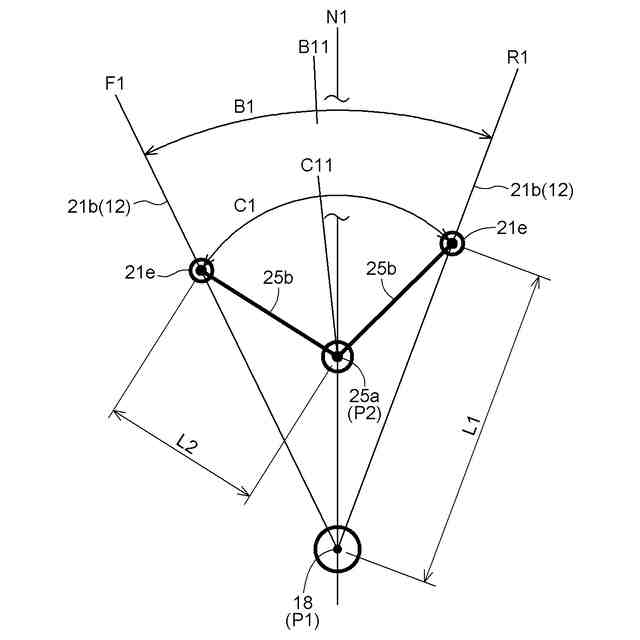
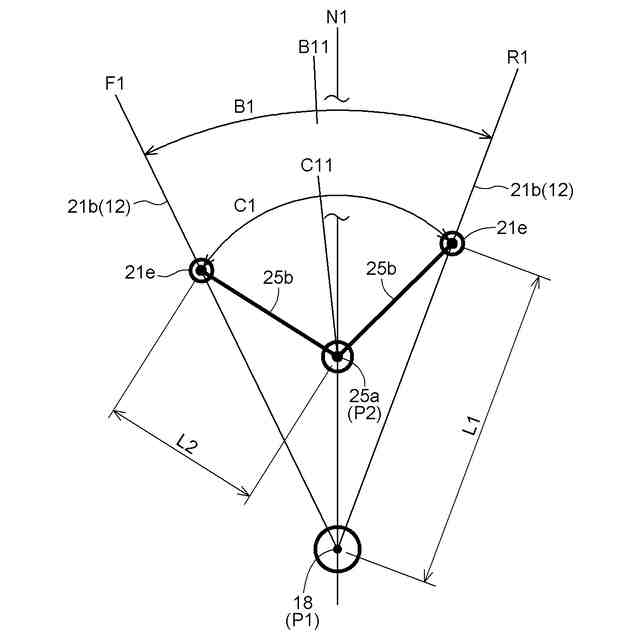
【解決手段】第1軸芯P1周りに揺動可能な人為操作具12と、第1軸芯P1に沿った第2軸芯P2周りに揺動可能な検出アーム25bの遊端部が人為操作具12に接続されるポテンショメータとが備えられる。人為操作具12が第1軸芯P1周りに操作されることに連動して検出アーム25bが第2軸芯P2周りに操作されることにより、ポテンショメータにより人為操作具12の操作位置が検出される。第1軸芯P1から検出アーム25bの遊端部と人為操作具12との接続部分21eまでの第1長さL1と、第2軸芯P2から検出アーム25bの遊端部と人為操作具12との接続部分21eまでの第2長さL2とにおいて、第2長さL2が第1長さL1よりも短い。
【選択図】図7
特許請求の範囲
【請求項1】
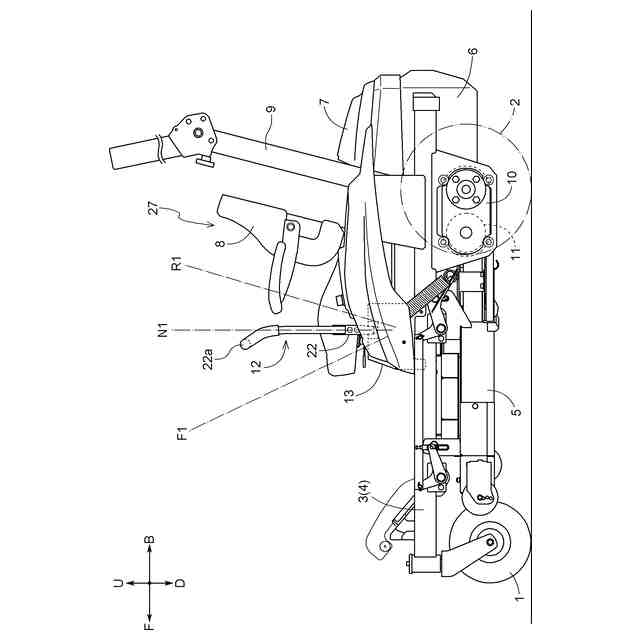
運転部が設けられた機体と、
前記機体に設けられた右及び左の走行装置と、
第1軸芯周りに揺動可能に設けられ、人為的に操作される人為操作具と、
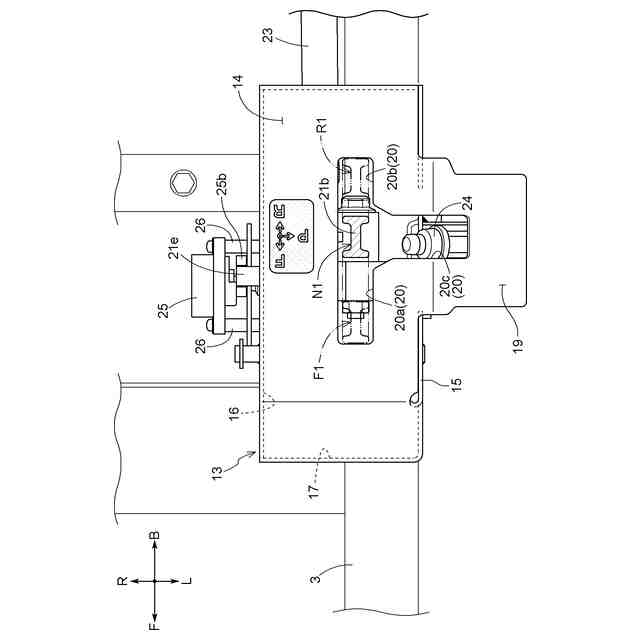
前記第1軸芯に沿った第2軸芯周りに揺動可能な検出アームを有し、前記検出アームの遊端部が前記人為操作具に接続されるポテンショメータとが備えられ、
前記人為操作具が前記第1軸芯周りに操作されることに連動して、前記検出アームが前記第2軸芯周りに操作されることによって、前記ポテンショメータにより前記人為操作具の操作位置が検出され、
前記第1軸芯から前記検出アームの遊端部と前記人為操作具との接続部分までの第1長さと、前記第2軸芯から前記検出アームの遊端部と前記人為操作具との接続部分までの第2長さとにおいて、前記第2長さが前記第1長さよりも短くなる位置に、前記第1軸芯及び前記第2軸芯が配置されている作業車。
続きを表示(約 1,100 文字)
【請求項2】
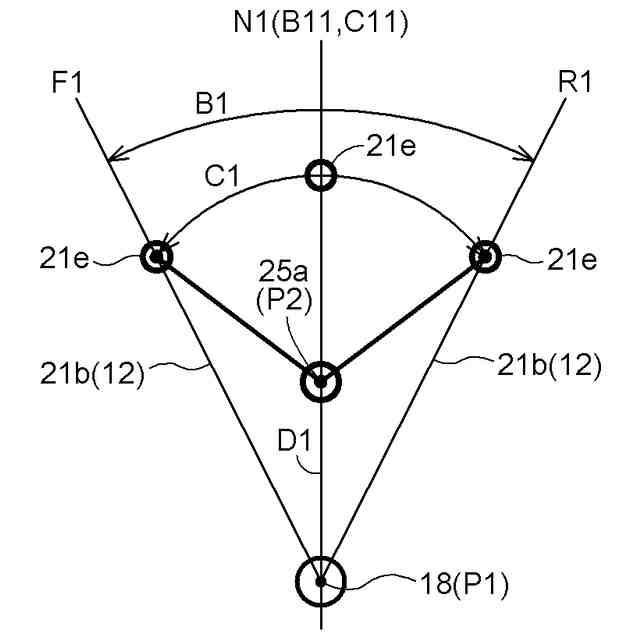
前記人為操作具が前記人為操作具の操作範囲の中央位置に位置すると、前記第1軸芯の方向から視て、前記検出アームの遊端部と前記人為操作具との接続部分と前記第1軸芯とを通る仮想線に、前記第2軸芯が位置するように、前記第2軸芯が配置されている請求項1に記載の作業車。
【請求項3】
前記第2軸芯が、前記検出アームの遊端部と前記人為操作具との接続部分よりも、前記第1軸芯に近い側に配置されている請求項1に記載の作業車。
【請求項4】
前記第2軸芯が、前記第1軸芯の方向から視て、前記人為操作具の操作範囲の中に配置されている請求項3に記載の作業車。
【請求項5】
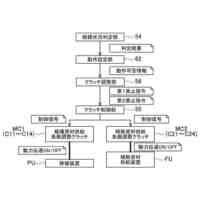
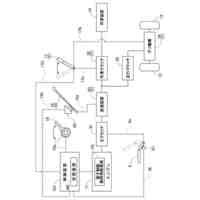
右及び左の前記走行装置を操作する右及び左の変速装置が備えられ、
右の前記人為操作具は、右の前記変速装置を操作可能な右の変速レバーであり、前記運転部の右部に設けられ、
左の前記人為操作具は、左の前記変速装置を操作可能な左の変速レバーであり、前記運転部の左部に設けられ、
右の前記ポテンショメータの検出値に基づいて右の前記変速装置が操作され、左の前記ポテンショメータの検出値に基づいて左の前記変速装置が操作される請求項1~4のうちのいずれか一項に記載の作業車。
【請求項6】
前記ポテンショメータが、前記変速レバーよりも前記運転部の左右中央側に設けられている請求項5に記載の作業車。
【請求項7】
前記変速装置は、中立位置と、前進側と、後進側とに操作可能であり、
前記変速レバーは、左右方向に沿った前記第1軸芯周り揺動可能に前記機体に設けられた基部と、作業者が持つ持ち手部が上部に設けられ、前記第1軸芯と直交する方向に沿った第3軸芯周りに揺動可能に前記基部に取り付けられ、前記第1軸芯周りに前記基部と一体で揺動可能なレバー部とを有し、
前記ポテンショメータは、前記基部の操作位置を検出し、
前記変速レバーの操作範囲の中立位置において、前記レバー部を左右方向に沿った方向に案内可能な中立案内部と、前記変速レバーの操作範囲の中立位置以外の範囲において、前記レバー部を前後方向に沿って案内可能な前進側及び後進側の走行案内部とを有するレバーガイドが備えられ、
前記レバー部が前記変速レバーの操作範囲の中立位置及び前記中立案内部に操作されると、前記変速装置が中立位置に操作され、前記レバー部が前進側及び後進側の前記走行案内部に操作されると、前記変速装置が前進側及び後進側に操作される請求項5に記載の作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業車において、人為的に操作される人為操作具の操作位置を検出する構成に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に開示されているように、作業車において、人為的に操作される変速レバー(人為操作具に相当)と、変速レバーの操作位置を検出するポテンショメータとが備えられたものがある。
これにより、作業車に搭乗する作業者が変速レバーを操作すると、ポテンショメータにより変速レバーの操作位置が検出され、ポテンショメータの検出値(変速レバーの操作位置)に基づいて、走行用の変速装置が操作される。
【0003】
変速レバーが軸芯周りに揺動可能である場合、ポテンショメータが変速レバーの軸芯の位置に設けられ、変速レバーとポテンショメータとが接続されることによって、ポテンショメータにより変速レバーの操作位置が検出される。
【先行技術文献】
【特許文献】
【0004】
特開2020-10436号公報(図2参照)
【発明の概要】
【発明が解決しようとする課題】
【0005】
ポテンショメータが人為操作具の軸芯の位置に設けられ、人為操作具とポテンショメータとが接続されることによって、ポテンショメータにより人為操作具の操作位置が検出される場合、人為操作具の操作範囲が、ポテンショメータが検出値を出力する範囲となる。
【0006】
ポテンショメータが検出値を出力可能な範囲であるポテンショメータの検出範囲は、人為操作具の操作範囲よりも大きいことが多いので、人為操作具の操作範囲の一方の端部と他方の端部とに亘って人為操作具が操作されても、ポテンショメータの検出範囲において使用されない部分が生じる。これにより、ポテンショメータの検出範囲を有効に使用するという面で改善の余地がある。
【0007】
本発明は、作業車において、人為操作具の操作位置をポテンショメータにより検出する場合に、ポテンショメータの検出範囲を有効に使用することができるように構成すること目的としている。
【課題を解決するための手段】
【0008】
本発明の作業車は、運転部が設けられた機体と、前記機体に設けられた右及び左の走行装置と、第1軸芯周りに揺動可能に設けられ、人為的に操作される人為操作具と、前記第1軸芯に沿った第2軸芯周りに揺動可能な検出アームを有し、前記検出アームの遊端部が前記人為操作具に接続されるポテンショメータとが備えられ、前記人為操作具が前記第1軸芯周りに操作されることに連動して、前記検出アームが前記第2軸芯周りに操作されることによって、前記ポテンショメータにより前記人為操作具の操作位置が検出され、前記第1軸芯から前記検出アームの遊端部と前記人為操作具との接続部分までの第1長さと、前記第2軸芯から前記検出アームの遊端部と前記人為操作具との接続部分までの第2長さとにおいて、前記第2長さが前記第1長さよりも短くなる位置に、前記第1軸芯及び前記第2軸芯が配置されている。
【0009】
本発明によると、第1軸芯周りに揺動可能な人為操作具と、第2軸芯周りに揺動可能な検出アームを有するポテンショメータとが備えられ、検出アームの遊端部が人為操作具に接続されている。人為操作具が第1軸芯周りに操作されることに連動して、検出アームが第2軸芯周りに操作され、ポテンショメータにより人為操作具の操作位置が検出される。
【0010】
前述の構成において、本発明によると、第2軸芯から検出アームの遊端部と人為操作具との接続部分までの第2長さが、第1軸芯から検出アームの遊端部と人為操作具との接続部分までの第1長さよりも短くなっている。
これにより、人為操作具の操作が拡大されて検出アームに伝達され、人為操作具の操作角度よりも検出アームの操作角度が大きくなるので、ポテンショメータの検出範囲において使用されない部分を少なくすることができて、ポテンショメータの検出範囲を有効に使用することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
18日前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業車
25日前
株式会社クボタ
田植機
25日前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業車
6日前
株式会社クボタ
作業機
18日前
株式会社クボタ
移植機
4日前
株式会社クボタ
作業車
4日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業機
1か月前
株式会社クボタ
作業車
4日前
株式会社クボタ
田植機
4日前
株式会社クボタ
作業機
1か月前
株式会社クボタ
多目的車両
13日前
株式会社クボタ
作物収穫機
28日前
株式会社クボタ
圃場作業車
20日前
株式会社クボタ
コンバイン
1か月前
株式会社クボタ
電動作業車両
20日前
株式会社クボタ
乗用型田植機
20日前
株式会社クボタ
電動作業車両
27日前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
歩行型作業機
20日前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
電動作業車両
13日前
株式会社クボタケミックス
電気融着継手
6日前
株式会社クボタ
嫌気性処理方法
11日前
株式会社クボタ
浮遊物観測装置
5日前
株式会社クボタケミックス
セグメント曲管
7日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ