TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025081955
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195086
出願日
2023-11-16
発明の名称
作業機
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
E02F
3/43 20060101AFI20250521BHJP(水工;基礎;土砂の移送)
要約
【課題】本発明は、土壌を掘削する際、想定している目標掘削深さよりも深く掘り下げることを抑制できる作業機を提供する。
【解決手段】本発明は、機体に対して回転可能に連結されたブームと、ブームに回転可能に連結されたアームと、アームに連結されたバケットであって、土壌を掘削する際に先頭となるエッジ部を有するバケットと、制御装置と、を備え、制御装置は、ブームを回転させて上昇させながらアームをブームに近づく方向に回転させることで目標掘削深さに沿った掘削を行う第一処理を行う際、操作開始位置におけるエッジ部から目標掘削深さまでの距離に応じて、アームの始動時からの経過時間に応じた目標角速度である第一の目標角速度、及びブームの始動時からの経過時間に応じた目標角速度である第二の目標角速度を設定し、設定した第一の目標角速度及び第二の目標角速度に基づいてアーム及びブームの回転を制御する。
【選択図】図5
特許請求の範囲
【請求項1】
機体と、
前記機体に対して第一の横軸回りで回転可能に連結されたブームと、
前記ブームの先端部に第二の横軸回りで回転可能に連結されたアームと、
前記アームの先端部に連結されたバケットであって、前記アームとの連結位置から離れた位置に、土壌を掘削する際に先頭となるエッジ部を有するバケットと、
前記ブーム及び前記アームの回転を制御する制御装置と、を備え、
前記制御装置は、
前記ブームを前記第一の横軸回りに回転させて上昇させながら前記アームを前記第二の横軸回りに前記ブームに近づく方向に回転させることで目標掘削深さに沿った掘削を行う第一処理を行う際、操作開始位置における前記エッジ部から前記目標掘削深さまでの距離に応じて、前記アームの始動時からの経過時間に応じた目標角速度である第一の目標角速度、及び前記ブームの始動時からの経過時間に応じた目標角速度である第二の目標角速度を設定し、設定した前記第一の目標角速度及び前記第二の目標角速度に基づいて前記アーム及び前記ブームの回転を制御する作業機。
続きを表示(約 1,700 文字)
【請求項2】
前記制御装置は、前記距離が短いほど前記アームの初速角速度が遅く且つ始動時から所定の第一経過時間までの角加速度が大きくなるように前記第一の目標角速度を設定し、前記第一の目標角速度に応じて前記第二の目標角速度を設定する請求項1に記載の作業機。
【請求項3】
前記制御装置は、前記第一の目標角速度を、始動時から前記第一経過時間まで増速し、前記第一経過時間以降は等速になるように設定する請求項2に記載の作業機。
【請求項4】
前記制御装置は、前記第二の目標角速度を、始動時から第二経過時間まで増速し、前記第二経過時間以降は等速になるように設定し、且つ前記距離が長いほど前記第二経過時間を長く設定する請求項1に記載の作業機。
【請求項5】
作動油の供給及び排出によって伸縮し、前記アームを回転させるアームシリンダと、
作動油の供給及び排出によって伸縮し、前記ブームを回転させるブームシリンダと、
前記アームシリンダに対する作動油の供給及び排出を切り換え可能で、且つ入力される電流値によって前記作動油の流量の調整を行うソレノイドを有するアーム制御弁と、
前記ブームシリンダに対する作動油の供給及び排出を切り換え可能で、且つ入力される電流値によって前記作動油の流量の調整を行うソレノイドを有するブーム制御弁と、を備え、
前記制御装置は、
前記アーム制御弁のソレノイドに前記第一の目標角速度に対応する電流を給電し、前記ブーム制御弁のソレノイドに前記第二の目標角速度に対応する電流を給電する請求項1に記載の作業機。
【請求項6】
前記アームシリンダ及び前記ブームシリンダに向けて前記作動油を吐出する油圧ポンプと、
前記油圧ポンプを駆動する駆動源と、をさらに備え、
前記制御装置は、
前記第一処理を行う際、前記アーム及び前記ブームの動作指示を受け付けたときの前記エッジ部から前記目標掘削深さまでの距離と前記駆動源の出力とに応じて前記第一の目標角速度及び前記第二の目標角速度を設定する請求項5に記載の作業機。
【請求項7】
前記駆動源は、
前記駆動源の出力域のうちの低出力域で出力する低出力モードと、
前記駆動源の前記出力域のうちの前記低出力域よりも高出力となる高出力モードとに出力モードの状態を切り換え可能に構成され、
前記制御装置は、
前記第一処理を行う際、前記アーム及び前記ブームの動作指示を受け付けたときの前記エッジ部から前記目標掘削深さまでの距離と、前記駆動源の前記出力モードの状態とに応じて、前記第一の目標角速度及び前記第二の目標角速度を設定する請求項6に記載の作業機。
【請求項8】
前記制御装置は、
下記の式(1)に基づいて前記アームの初速角速度を設定し、
下記の式(2)に基づいて始動時から所定の経過時間までの前記アームの角速度の増加割合を設定し、
下記の式(3)に基づいて始動時から前記所定の経過時間までの前記第一の目標角速度を設定する請求項7に記載の作業機。
初速角速度ωs=(P×k)-Nd ・・・式(1)
角速度の増加割合α=(ωmax-ωs)÷Ta ・・・式(2)
第一の目標加速度=α×Tb+ωs ・・・式(3)
但し、P : 始動時のエッジ部から目標掘削深さまでの距離
k : 予め設定される係数
Nd : 駆動源の出力の高出力モードにおける出力に対する差分
ωmax : 駆動源の出力に応じたアームの想定最大角速度
Ta : 最大角速度までの到達時間
Tb : 始動からの経過時間
【請求項9】
前記制御装置は、
前記第一の目標角速度よりも遅くなる所定の反映係数を前記第一の目標角速度に乗算して前記第二の目標角速度を導出する請求項1に記載の作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、土壌を掘削するショベル装置を備えた作業機に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来から、バケットによる掘削深さの計測結果に応じて掘削動作を制御する作業機が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2007-061042号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
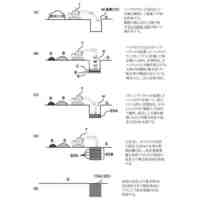
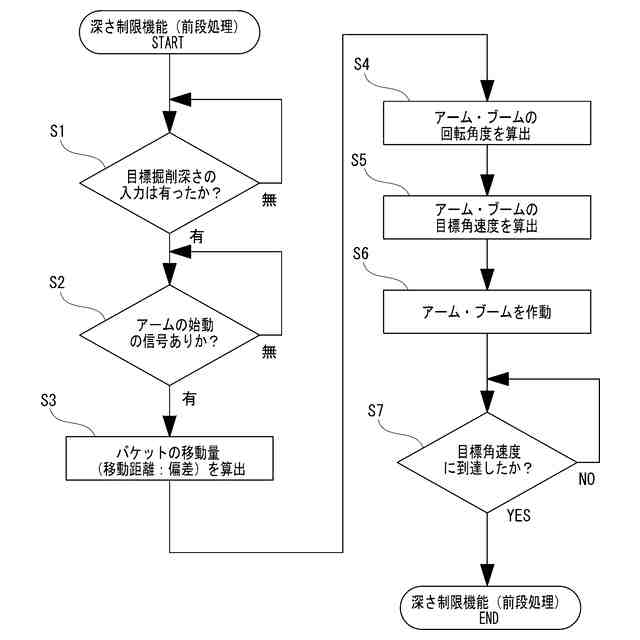
しかし、掘削深さはアームとブームの複合動作により制御されるが、ブームとアームは始動時の応答特性が異なるので、始動時のバケットの先端の位置によっては、バケット先端の位置を目標高さで正確に制御できない場合がある。例えば、目標深さの近傍でブーム及びバケットを始動させてバケット先端を目標深さに沿って水平移動させたい場合(所謂、水平引きする場合)、アームのクラウド動作に対してブームの上昇動作が遅れてしまい、目標掘削深さよりも深く掘り下げてしまうことがある。
【0005】
そこで、本発明は、土壌を掘削する際、想定している目標掘削深さよりも深く掘り下げることを抑制できる作業機を提供する。
【課題を解決するための手段】
【0006】
本発明に係る作業機は、機体と、前記機体に対して第一の横軸回りで回転可能に連結されたブームと、前記ブームの先端部に第二の横軸回りで回転可能に連結されたアームと、前記アームの先端部に連結されたバケットであって、前記アームとの連結位置から離れた位置に、土壌を掘削する際に先頭となるエッジ部を有するバケットと、前記ブーム及び前記アームの回転を制御する制御装置と、を備え、前記制御装置は、前記ブームを前記第一の横軸回りに回転させて上昇させながら前記アームを前記第二の横軸回りに前記ブームに近づく方向に回転させることで目標掘削深さに沿った掘削を行う第一処理を行う際、操作開始位置における前記エッジ部から前記目標掘削深さまでの距離に応じて、前記アームの始動時からの経過時間に応じた目標角速度である第一の目標角速度、及び前記ブームの始動時からの経過時間に応じた目標角速度である第二の目標角速度を設定し、設定した前記第一の目標角速度及び前記第二の目標角速度に基づいて前記アーム及び前記ブームの回転を制御する。
【発明の効果】
【0007】
本発明の作業機は、土壌を掘削する際、想定している目標掘削深さよりも深く掘り下げることを抑制できる。
【図面の簡単な説明】
【0008】
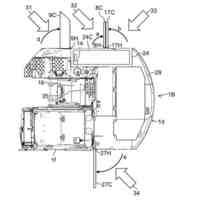
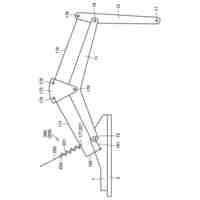
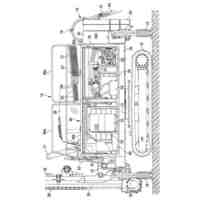
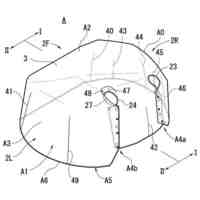
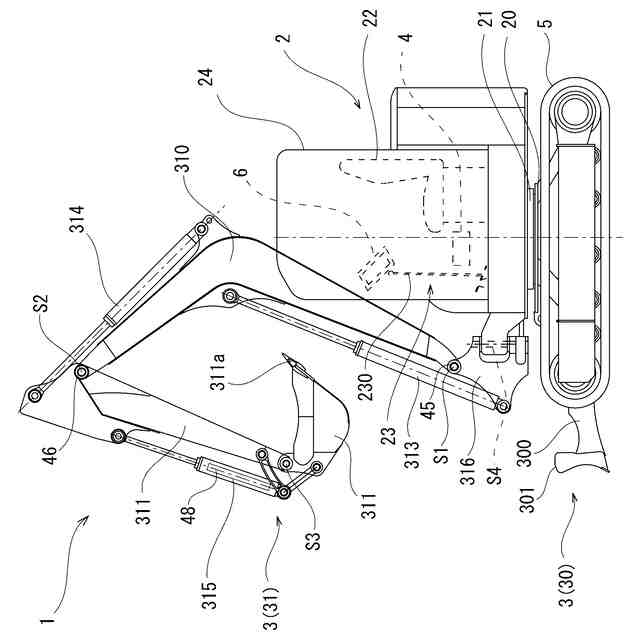
図1は、本発明の第一実施形態に係る作業機の側面図である。
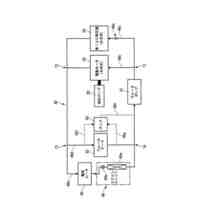
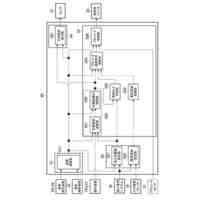
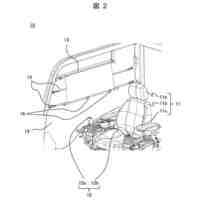
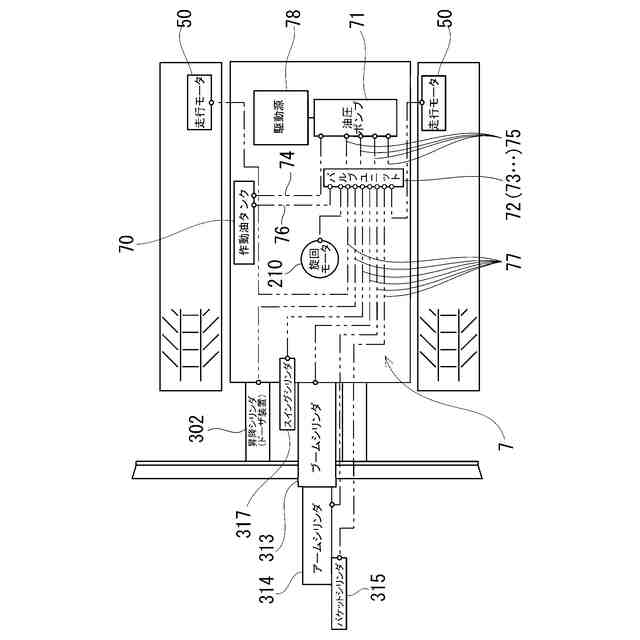
図2は、第一実施形態に係る作業機の油圧系の概略ブロック図である。
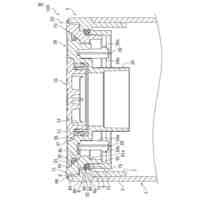
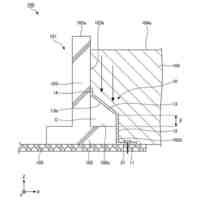
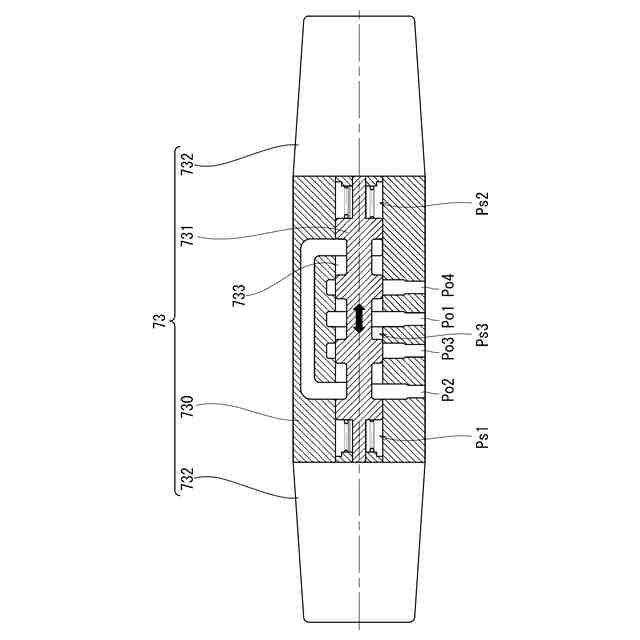
図3は、第一実施形態に係る作業機のコントロールバルブに含まれる制御弁の一例の概略断面図である。
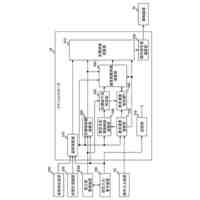
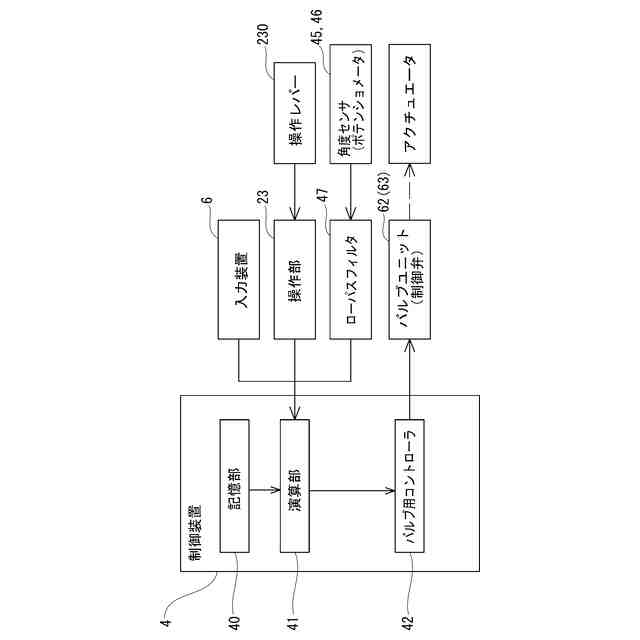
図4は、第一実施形態に係る作業機の制御装置を含む電気(信号)系統の概略ブロック図である。
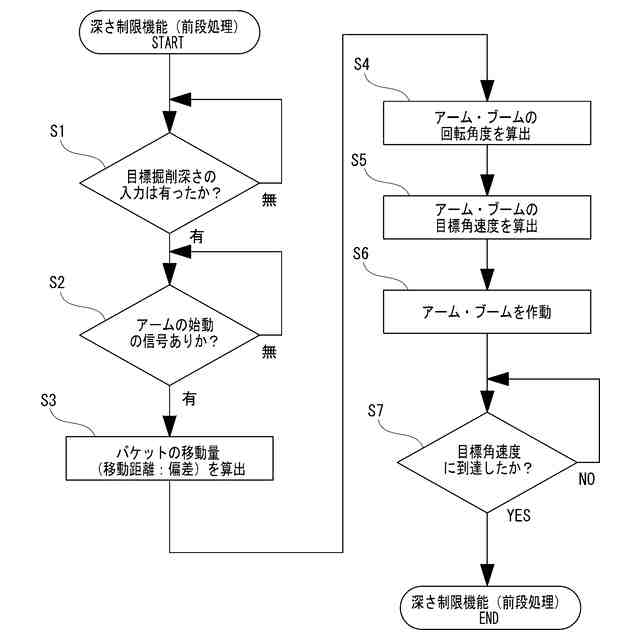
図5は、第一実施形態に係る作業機の深さ制限機能の前段処理のフロー図である。
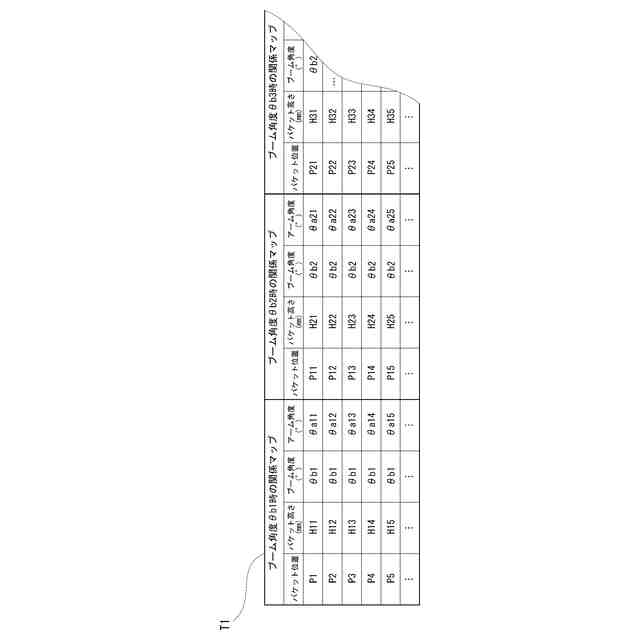
図6は、第一実施形態に係る作業機の前段処理に用いられる情報(データ)の関係性を示すテーブル(マップ)の概念図である。
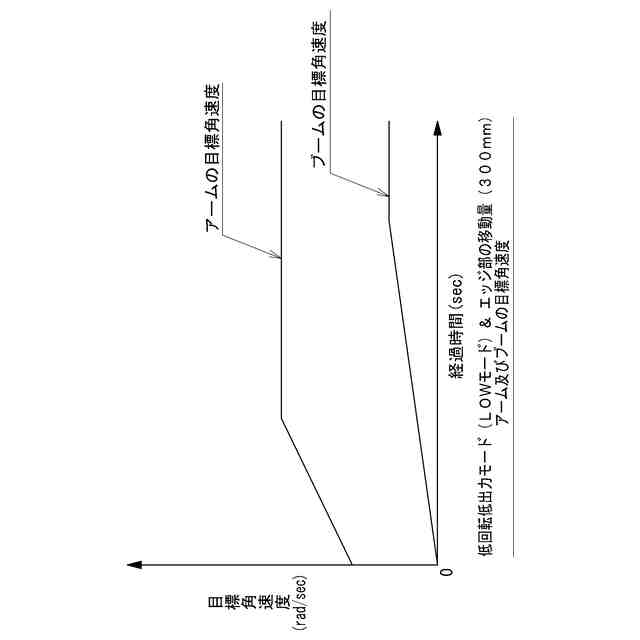
図7は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が多い場合の低回転低出力モードのグラフである。
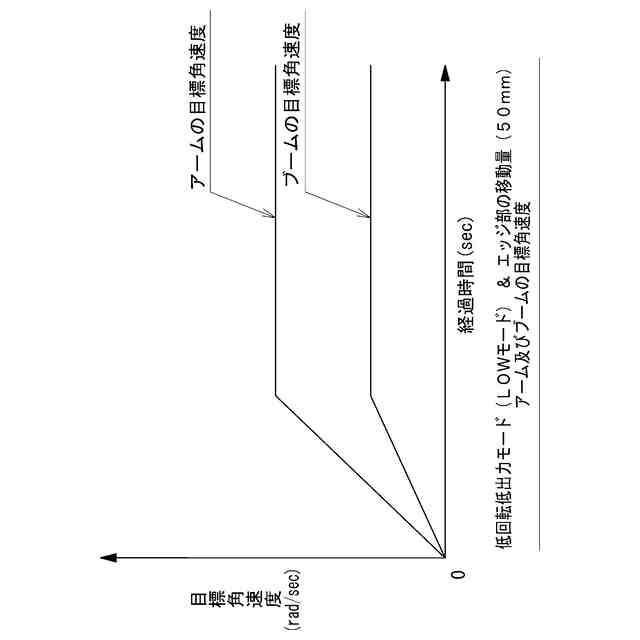
図8は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が少ない場合の低回転低出力モードのグラフである。
図9は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が多い場合の高回転高出力モードのグラフである。
図10は、第一実施形態に係る作業機の深さ制限機能の前段処理で設定されるアーム及びブームの目標角速度のグラフであって、バケットのエッジ部の移動量が少ない場合の高回転高出力モードのグラフである。
図11は、第一実施形態に係る作業機の制御装置の演算部の概略説明図である。
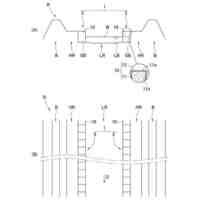
図12は、第一実施形態に係る作業機のバケットの動作を制限する領域の説明図である。
図13は、第一実施形態に係る作業機のバケットの動作を制限する領域でのバケットの角速度を示すグラフである。
図14は、本発明の第二実施形態に係る作業機の前段処理に用いられる情報(データ)を説明するための説明図である。
図15は、第二実施形態に係る作業機の前段処理に用いられる情報(データ)の関係性を示すテーブル(マップ)の概念図である。
図16は、第二実施形態に係る作業機の深さ制限機能の前段処理のフロー図である。
【発明を実施するための形態】
【0009】
(第一実施形態)
以下、本発明の一実施形態に係る作業機について、図面を参照しながら説明する。
【0010】
図1に示すように、作業機1は、機体2と、機体2に支持された作業装置3と、少なくとも作業装置3の動作を制御する制御装置4と、を備える。さらに、作業機1は、機体2を走行可能に支持する走行装置5を備える。本実施形態に係る作業機1は、上記構成に加え、作業者が必要な情報を入力する入力装置6を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
5日前
株式会社クボタ
圃場作業機
今日
個人
簡易免震構造
19日前
株式会社クボタ
作業車両
15日前
日立建機株式会社
作業機械
14日前
日本車輌製造株式会社
建設機械
12日前
株式会社本久
改良地盤構築方法
6日前
株式会社久保製作所
河川構造物
20日前
日立建機株式会社
建設機械
今日
株式会社クボタ
作業機
5日前
株式会社大林組
改良土の品質管理方法
今日
前田工繊株式会社
繊維製布団篭
9日前
株式会社フジタ
建築物とその施工方法
5日前
日立建機株式会社
電動式建設機械
20日前
日本精機株式会社
施工管理システム及び施工管理方法
9日前
ナブテスコ株式会社
建設機械の関節機構
12日前
株式会社丸和
連結金具セット、及び連結方法
14日前
株式会社小松製作所
作業機械
16日前
株式会社 CUP商会
仮補強リングの使用方法
7日前
日本車輌製造株式会社
取付具
9日前
西松建設株式会社
護岸ブロック及び護岸構造物
6日前
株式会社竹中工務店
基礎梁
22日前
PCサポート株式会社
盛土構造体の構築方法
7日前
松井金網工業株式会社
ふとん籠とふとん籠の施工方法
20日前
日立建機株式会社
建設機械
20日前
日本車輌製造株式会社
建設機械及び建設機械の使用方法
12日前
アロン化成株式会社
蓋および蓋用アダプタ
14日前
コベルコ建機株式会社
カメラ保護装置
今日
株式会社竹内製作所
作業用車両
12日前
YKK AP株式会社
柱の固定構造
12日前
株式会社技研製作所
施工方法、施工システム及びアタッチメント
6日前
個人
保護カバー及び保護カバーの取付け方法
22日前
株式会社竹内製作所
作業用車両
22日前
大和ハウス工業株式会社
基礎構造、及び基礎構造の施工方法
今日
株式会社長谷工コーポレーション
水路形成体とその取付方法
1日前
東急建設株式会社
合成壁の設計方法
8日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ