TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025110247
公報種別
公開特許公報(A)
公開日
2025-07-28
出願番号
2024004075
出願日
2024-01-15
発明の名称
作業機械
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
3/38 20060101AFI20250718BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機の重力を簡便かつ正確に補償する。
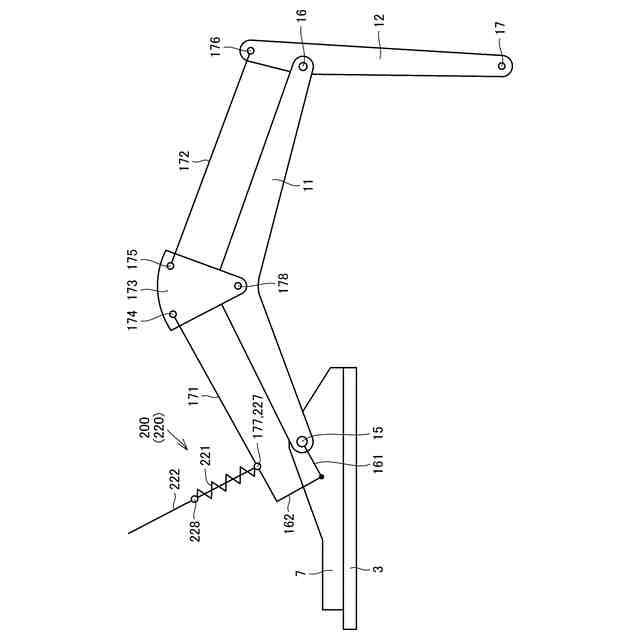
【解決手段】作業機は、車体フレーム3に支持されるブーム11と、ブーム11に連結されるアーム12と、アーム12に連結されるアタッチメントと、を含んでいる。第1アクチュエータは、ブーム11を車体フレーム3に対して相対移動させるブーム駆動トルクを発生する。第2アクチュエータは、アーム12をブーム11に対して相対移動させるアーム駆動トルクを発生する。動力伝達装置は、アーム駆動トルクを機械的にアームに伝達する。動力伝達装置とブーム11とは、リンク機構を構成する。第1弾性部材は、ブームの重力を補償する。第2弾性部材221は、アーム12の重力を補償する。
【選択図】図13
特許請求の範囲
【請求項1】
車体フレームと、
前記車体フレームに支持されるブームと、前記ブームに連結されるアームと、前記アームに連結されるアタッチメントと、を含む作業機と、
前記ブームを前記車体フレームに対して相対移動させるブーム駆動トルクを発生する第1アクチュエータと、
前記アームを前記ブームに対して相対移動させるアーム駆動トルクを発生する第2アクチュエータと、
前記アーム駆動トルクを機械的に前記アームに伝達し、前記ブームとともにリンク機構を構成する、動力伝達装置と、
前記ブームの重力を補償する第1弾性部材と、
前記アームの重力を補償する第2弾性部材と、を備える、作業機械。
続きを表示(約 720 文字)
【請求項2】
前記車体フレームに対して相対回転可能に前記車体フレームに支持され、前記第1弾性部材を支持する、第1ロッド部材をさらに備える、請求項1に記載の作業機械。
【請求項3】
前記ブームに取り付けられ、前記第1ロッド部材の端部を支持する、第1可動ピンをさらに備える、請求項2に記載の作業機械。
【請求項4】
前記車体フレームに対して相対回転可能に前記車体フレームに支持され、前記第2弾性部材を支持する、第2ロッド部材をさらに備える、請求項1に記載の作業機械。
【請求項5】
前記動力伝達装置に取り付けられ、前記第2ロッド部材の端部を支持する、第2可動ピンをさらに備える、請求項4に記載の作業機械。
【請求項6】
水平方向に対する前記車体フレームの角度を検出する角度センサと、
前記車体フレームに対する前記ブームの回転中心回りの、前記作業機のモーメントを計算し、傾斜地におけるモーメントと水平地におけるモーメントとの差を考慮した前記ブーム駆動トルクを前記第1アクチュエータに発生させる、コントローラと、をさらに備える、請求項1から請求項5のいずれか1項に記載の作業機械。
【請求項7】
水平方向に対する前記車体フレームの角度を検出する角度センサと、
前記ブームに対する前記アームの回転中心回りの、前記作業機のモーメントを計算し、傾斜地におけるモーメントと水平地におけるモーメントとの差を考慮した前記アーム駆動トルクを前記第2アクチュエータに発生させる、コントローラと、をさらに備える、請求項1から請求項5のいずれか1項に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来技術として、特開2015-105560号公報(特許文献1)に記載された作業機械を例示する。この作業機械は、作業アタッチメントのブームが上部旋回体に回動可能に取り付けられた構成である。重量補償バネの一端がブームに取り付けられており、重量補償バネの他端が上部旋回体に取り付けられている。重量補償バネのバネ力によって、ブームの基端側の回動軸に作用する作業アタッチメントの全重量によるトルクが補償される。
【先行技術文献】
【特許文献】
【0003】
特開2015-105560号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機の重力を機構的に補償する重力補償機構を備える作業機械においては、簡便かつ正確に重力補償ができることが求められている。
【0005】
本開示では、作業機の重力を簡便かつ正確に補償できる、作業機械が提案される。
【課題を解決するための手段】
【0006】
本開示に従った作業機械は、車体フレームと、作業機と、第1アクチュエータと、第2アクチュエータと、動力伝達装置と、第1弾性部材と、第2弾性部材と、を備えている。作業機は、車体フレームに支持されるブームと、ブームに連結されるアームと、アームに連結されるアタッチメントと、を含んでいる。第1アクチュエータは、ブームを車体フレームに対して相対移動させるブーム駆動トルクを発生する。第2アクチュエータは、アームをブームに対して相対移動させるアーム駆動トルクを発生する。動力伝達装置は、アーム駆動トルクを機械的にアームに伝達する。動力伝達装置とブームとは、リンク機構を構成する。第1弾性部材は、ブームの重力を補償する。第2弾性部材は、アームの重力を補償する。
【発明の効果】
【0007】
本開示の作業機械によると、作業機の重量を簡便かつ正確に補償することができる。
【図面の簡単な説明】
【0008】
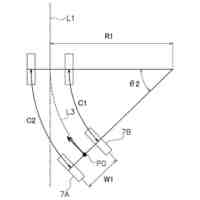
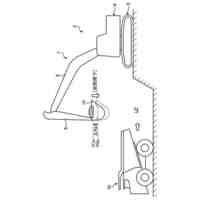
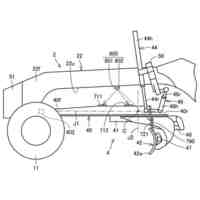
電動式ショベルの構成を概略的に示す側面図である。
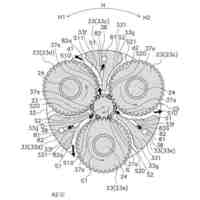
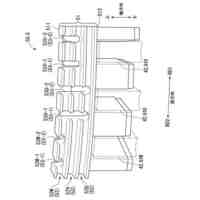
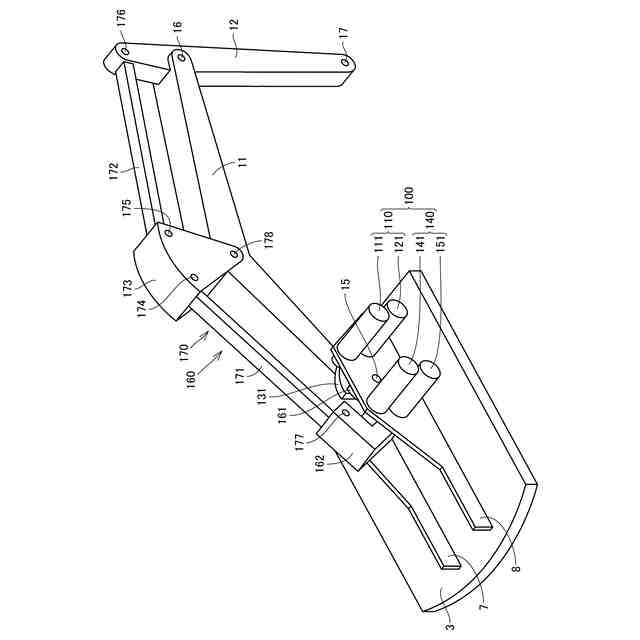
車体フレームおよび作業機の斜視図である。
車体フレームおよび作業機の平面図である。
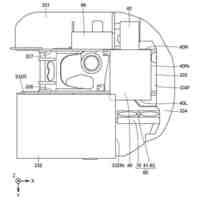
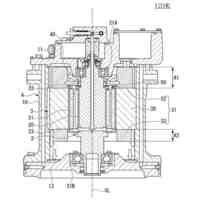
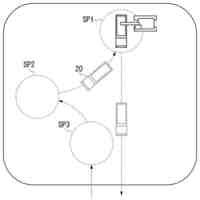
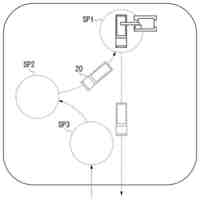
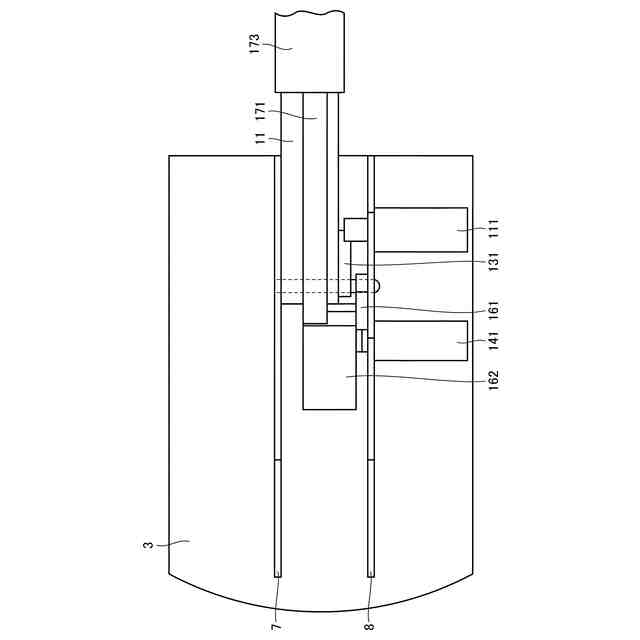
ブームに駆動力を伝達する動力伝達装置の概略構成を示す図である。
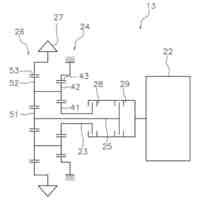
電動機から歯車部材までの動力伝達経路のスケルトン図である。
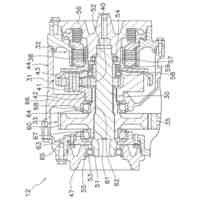
アームに駆動力を伝達する動力伝達装置の概略構成を示す図である。
ダブルモータ駆動の模式図である。
ブームの自重と釣り合うように機構的に補償する第1機構の概略構成を示す図である。
第1機構の拡大図である。
ブームを上げた姿勢での第1機構を示す概略図である。
ブームを下げた姿勢での第1機構を示す概略図である。
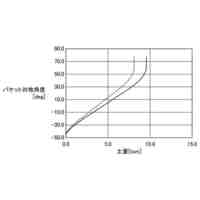
第1弾性部材の発生するモーメントを示す表である。
アームの自重と釣り合うように機構的に補償する第2機構の概略構成を示す図である。
第2機構の拡大図である。
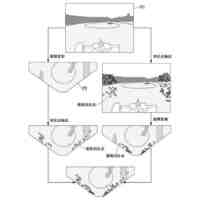
アームをダンプ方向に移動させた姿勢での第2機構を示す概略図である。
アームを掘削方向に移動させた姿勢での第2機構を示す概略図である。
第2弾性部材の発生するモーメントを示す表である。
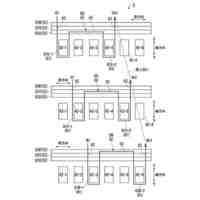
水平地における作業機のモーメントを示す模式図である。
傾斜地における作業機のモーメントを示す模式図である。
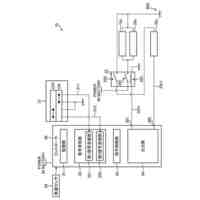
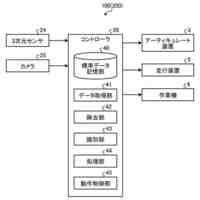
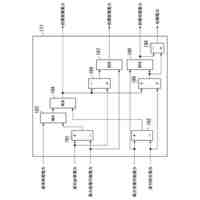
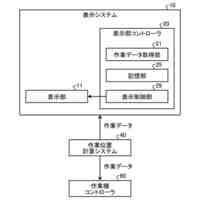
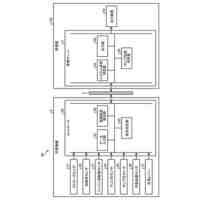
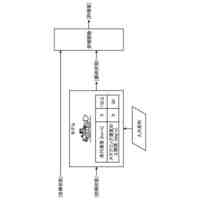
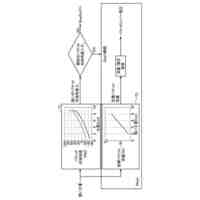
制御システムの概略構成を示すブロック図である。
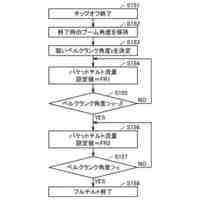
傾斜地における駆動トルクを決定する処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、実施形態について図に基づいて説明する。以下の説明では、同一の部品および構成要素には同一の符号を付してある。それらの名称および機能も同じである。したがって、これらについての詳細な説明は繰り返さない。図面では、説明の便宜上、構成を省略または簡略化している場合もある。実施形態から任意の構成が抽出され、それらが任意に組み合わされることも、当初から予定されている。
【0010】
以下の説明において、「上」、「下」、「前」、「後」、「左」、「右」とは、運転室4内の運転席4Sに着座したオペレータを基準とした方向である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
8日前
株式会社小松製作所
モータ
8日前
株式会社小松製作所
作業機械
9日前
株式会社小松製作所
作業機械
16日前
株式会社小松製作所
路面整備システム
8日前
株式会社小松製作所
プラネタリギヤ機構
7日前
株式会社小松製作所
回転電機及び作業機械
1か月前
株式会社小松製作所
識別システム及び識別方法
1か月前
株式会社小松製作所
モータ及びモータの製造方法
8日前
株式会社小松製作所
ロータ、回転電機及び作業機械
1か月前
株式会社小松製作所
システム、作業車両および方法
9日前
株式会社小松製作所
システム、作業車両および方法
9日前
株式会社小松製作所
ステータ、回転電機及び作業機械
1か月前
株式会社小松製作所
作業機械、及び、トランスファ装置
21日前
株式会社小松製作所
表示システム、表示方法及び作業機械
22日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
1か月前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
15日前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
8日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
8日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
22日前
株式会社小松製作所
産業機械の熱変位補正装置及び熱変位補正方法
1か月前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
23日前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
8日前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
8日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
8日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
16日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
1日前
株式会社小松製作所
作業機械の制御システム、作業機械、及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
8日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
1日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
16日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
17日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
17日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動制御方法
1日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
1日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ