TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025127647
公報種別
公開特許公報(A)
公開日
2025-09-02
出願番号
2024024461
出願日
2024-02-21
発明の名称
作業機械、作業機械を含むシステム、および作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
9/26 20060101AFI20250826BHJP(水工;基礎;土砂の移送)
要約
【課題】バケット内の積荷質量とバケットの姿勢との関係の精度を向上する。
【解決手段】作業機械は、先端にバケットを有する作業機と、作業機の動作を指令するコントローラとを備えている。コントローラは、予め記憶されたバケット内の積荷の質量である積荷質量とバケットの姿勢との関係と、取得した1つの特定のバケット姿勢における積荷質量と、に基づいて、予め記憶されている関係を修正する。
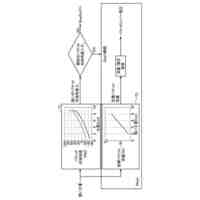
【選択図】図12
特許請求の範囲
【請求項1】
先端にバケットを有する作業機と、
前記作業機の動作を指令するコントローラとを備え、
前記コントローラは、予め記憶された前記バケット内の積荷の質量である積荷質量と前記バケットの姿勢との関係と、取得した1つの特定のバケット姿勢における積荷質量と、に基づいて、予め記憶されている前記関係を修正する、作業機械。
続きを表示(約 900 文字)
【請求項2】
前記コントローラは、前記バケットの姿勢が前記1つの特定のバケット姿勢であるときに前記関係によって定まる積荷質量と、前記取得した積荷質量と、の比を用いて、前記関係を修正する、請求項1に記載の作業機械。
【請求項3】
前記コントローラは、修正された前記関係を利用して前記バケットから前記積荷を排出させる、請求項1に記載の作業機械。
【請求項4】
前記1つの特定のバケット姿勢は、積荷質量が最大となる前記バケットの姿勢である、請求項1に記載の作業機械。
【請求項5】
前記バケットの姿勢は、地面に対する前記バケットの角度によって規定される、請求項1に記載の作業機械。
【請求項6】
前記コントローラは、前記バケットで掘削される掘削対象を選択する入力を受ける、請求項1に記載の作業機械。
【請求項7】
前記掘削対象毎に前記関係が記憶されている、請求項6に記載の作業機械。
【請求項8】
前記コントローラは、前記バケットで掘削される掘削対象の安息角を取得し、前記安息角に基づいて、予め記憶されている前記関係を修正する、請求項1に記載の作業機械。
【請求項9】
前記コントローラは、修正された前記関係を記憶させる、請求項1に記載の作業機械。
【請求項10】
先端にバケットを有する作業機と、
前記作業機の動作を指令するコントローラとを備え、
前記コントローラは、
予め記憶された前記バケット内の積荷の質量である積荷質量と前記バケットの姿勢との関係と、取得した1つの特定のバケット姿勢における積荷質量と、に基づいて、予め記憶されている前記関係を修正するか、または、
積荷質量を最大とした後、前記バケットから前記積荷を排出させ、前記積荷の排出中の積荷質量と前記バケットの姿勢とを取得することにより、予め記憶されている前記関係を修正するか、
のいずれか1つを選択的に実行する、作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械、作業機械を含むシステム、および作業機械の制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
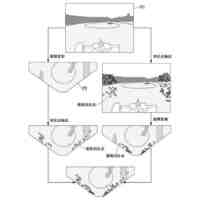
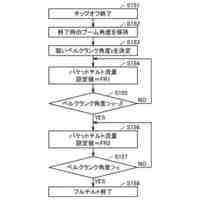
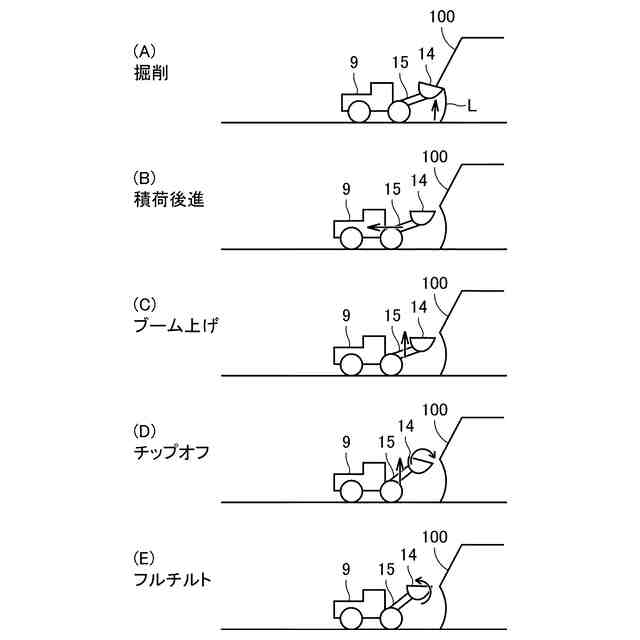
チップオフは、バケット内の余分な積荷をバケットから落下させる動作である。チップオフは、たとえば、作業機械から搬送機械への積み込み量を調整するために行われる。米国特許出願公開第2022/0325497号明細書(特許文献1)には、撹拌を伴う自動チップオフ処理が記載されている。取り扱われる材料の種類に応じて、異なる撹拌パターンが選択される。機械学習を使用して、撹拌パターンを含むチップオフ処理の特徴に基づいて、バケットダンプ中にこぼれる材料の量をモデル化することができる。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2022/0325497号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
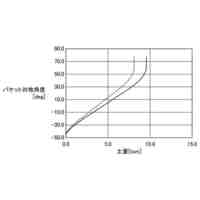
所定の走行路を走行する搬送機械の過積載を防止するために、バケットがどの姿勢のときにバケット内の積荷質量が幾らであるかを精度よく特定できることが求められる。
【0005】
本開示では、バケット内の積荷質量とバケットの姿勢との関係の精度を向上できる、作業機械、作業機械を含むシステム、および作業機械の制御方法が提案される。
【課題を解決するための手段】
【0006】
本開示のある局面に係る作業機械は、先端にバケットを有する作業機と、作業機の動作を指令するコントローラとを備えている。コントローラは、予め記憶されたバケット内の積荷の質量である積荷質量とバケットの姿勢との関係と、取得した1つの特定のバケット姿勢における積荷質量と、に基づいて、予め記憶されている関係を修正する。
【0007】
本開示のある局面に係る作業機械は、先端にバケットを有する作業機と、作業機の動作を指令するコントローラとを備えている。コントローラは、予め記憶されたバケット内の積荷の質量である積荷質量とバケットの姿勢との関係と、取得した1つの特定のバケット姿勢における積荷質量と、に基づいて、予め記憶されている関係を修正するか、または、積荷質量を最大とした後、バケットから積荷を排出させ、積荷の排出中の積荷質量とバケットの姿勢とを取得することにより、予め記憶されている関係を修正するか、のいずれか1つを選択的に実行する。
【0008】
本開示のある局面に係るシステムは、作業機械を備えている。作業機械は、先端にバケットを有する作業機を含んでいる。システムは、作業機の動作を指令するコントローラを備えている。コントローラは、予め記憶されたバケット内の積荷の質量である積荷質量とバケットの姿勢との関係と、取得した1つの特定のバケット姿勢における積荷質量と、に基づいて、予め記憶されている関係を修正する。
【0009】
本開示のある局面に係る作業機械の制御方法は、以下のステップを備えている。第1のステップは、作業機の先端のバケットを1つの特定の姿勢にすることである。第2のステップは、バケットが特定の姿勢のときに、バケット内の積荷の質量である積荷質量を取得することである。第3のステップは、予め記憶されている、積荷質量とバケットの姿勢との関係を、取得した積荷質量に基づいて修正することである。
【発明の効果】
【0010】
本開示によると、バケット内の積荷質量とバケットの姿勢との関係の精度を向上することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
モータ
18日前
株式会社小松製作所
モータ
18日前
株式会社小松製作所
作業機械
19日前
株式会社小松製作所
作業機械
26日前
株式会社小松製作所
路面整備システム
18日前
株式会社小松製作所
プラネタリギヤ機構
17日前
株式会社小松製作所
モータ及びモータの製造方法
18日前
株式会社小松製作所
システム、作業車両および方法
19日前
株式会社小松製作所
システム、作業車両および方法
19日前
株式会社小松製作所
作業機械、及び、トランスファ装置
1か月前
トヨタ自動車株式会社
運行管理装置
2日前
株式会社小松製作所
表示システム、表示方法及び作業機械
1か月前
トヨタ自動車株式会社
運行管理装置
2日前
株式会社小松製作所
表示システム、情報端末、及び表示方法
1か月前
トヨタ自動車株式会社
車両走行管理装置
2日前
株式会社小松製作所
作業機械を制御するためのシステム及び方法
25日前
株式会社小松製作所
モータ、モータの製造方法及びインシュレータ
18日前
株式会社小松製作所
作業内容推定システムおよび作業内容推定方法
18日前
株式会社小松製作所
作業機械用ファイナルドライブおよび作業機械
1か月前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業機械の診断システム及び作業機械の診断方法
1か月前
株式会社小松製作所
作業現場の管理システム及び作業現場の管理方法
18日前
株式会社小松製作所
作業車両の制御システムおよび作業車両の制御方法
18日前
株式会社小松製作所
作業機械の操作システム、および作業機械の操作方法
2日前
株式会社小松製作所
作業機械の表示制御システムおよび作業内容の表示方法
18日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
26日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
11日前
株式会社小松製作所
モータグレーダおよびモータグレーダのドローバ姿勢算出方法
11日前
株式会社小松製作所
作業機械のカメラシステムおよびカメラパラメータの校正方法
18日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
26日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
27日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
27日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動制御方法
11日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
11日前
株式会社小松製作所
作業機械および作業機械の制御方法
9日前
株式会社小松製作所
作業機械の遠隔操作システム、作業機械の遠隔コントローラ、及び作業機械の遠隔操作方法
27日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ