TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025134216
公報種別
公開特許公報(A)
公開日
2025-09-17
出願番号
2024031983
出願日
2024-03-04
発明の名称
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
9/20 20060101AFI20250909BHJP(水工;基礎;土砂の移送)
要約
【課題】自動作業の開始位置への移動を自動で行う作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法を提供する。
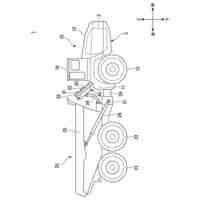
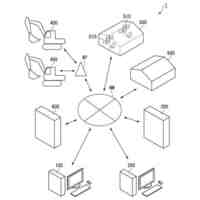
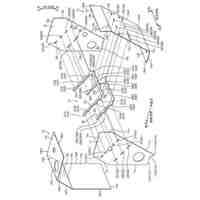
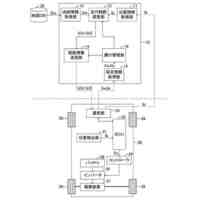
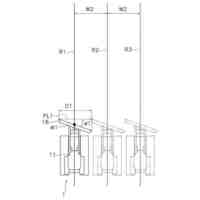
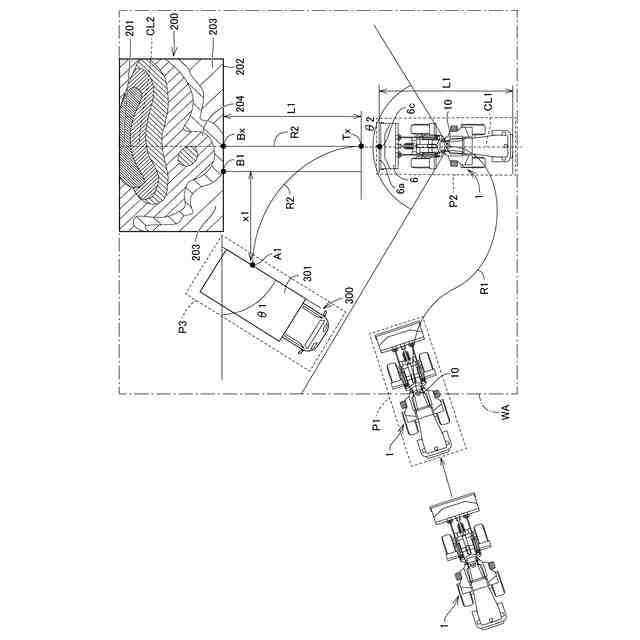
【解決手段】作業機械を含むシステムは、掘削対象200を掘削し、掘削された掘削物を積込対象300に積み込む一連の作業を自動化した自動作業を実行する。ホイールローダ1は、位置情報取得装置112と、自動化コントローラ100とを有する。位置情報取得装置112は、ホイールローダ1の現在位置P1を検出する。自動化コントローラ100は、位置情報取得装置112が検出したホイールローダ1の現在位置P1と自動作業を開始するための開始位置P2とから現在位置P1から開始位置P2までの走行経路R1を生成する。
【選択図】図5
特許請求の範囲
【請求項1】
掘削対象を掘削し、掘削された掘削物を積込対象に積み込む一連の作業を自動化した自動作業を実行する、作業機械を含むシステムであって、
前記作業機械の現在位置を検出する位置情報センサと、
前記位置情報センサが検出した前記作業機械の前記現在位置と前記自動作業を開始するための開始位置とから前記現在位置から前記開始位置までの走行経路を生成するコントローラと、を備える、システム。
続きを表示(約 1,000 文字)
【請求項2】
前記作業機械は、走行体を有し、
前記コントローラは、生成した前記走行経路に沿って前記作業機械が自動で走行するように前記走行体を制御する、請求項1に記載のシステム。
【請求項3】
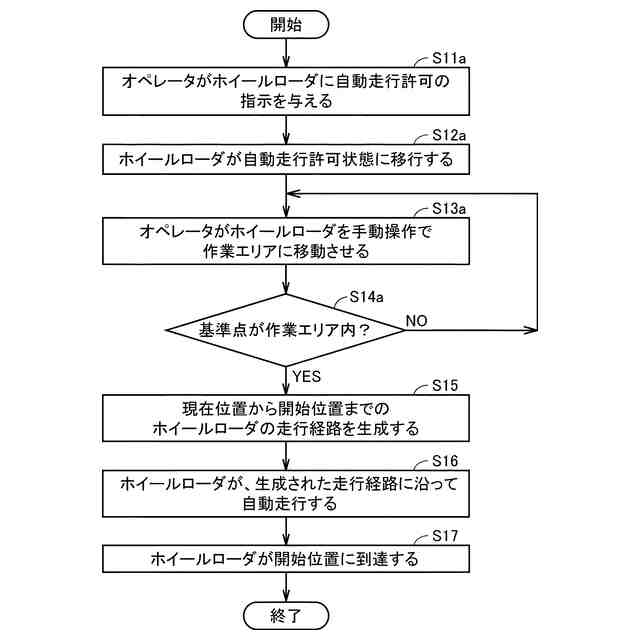
前記コントローラは、前記一連の作業を実行するための作業エリア内に前記作業機械が入ったとの判定結果に基づいて、前記走行経路を生成する、請求項1に記載のシステム。
【請求項4】
前記コントローラは、オペレータの操作に基づいて、前記走行経路に沿って前記作業機械を自動で走行させる自動走行の許可状態に前記作業機械を移行させる、請求項3に記載のシステム。
【請求項5】
前記コントローラは、オペレータの操作に基づいて、前記走行経路を生成する、請求項1に記載のシステム。
【請求項6】
前記コントローラは、前記一連の作業を実行するための作業エリア内に前記作業機械が入ったとの判定結果に基づいて、前記走行経路に沿って前記作業機械を自動で走行させる自動走行の許可状態に前記作業機械を移行させる、請求項5に記載のシステム。
【請求項7】
オペレータの前記操作は、前記作業機械から離れた遠隔地からのオペレータの操作である、請求項4または請求項5に記載のシステム。
【請求項8】
前記コントローラは、据え切りせずに走行可能な前記走行経路を生成する、請求項1に記載のシステム。
【請求項9】
掘削対象を掘削し、掘削された掘削物を積込対象に積み込む一連の作業を自動化した自動作業を実行する、作業機械であって、
前記作業機械の現在位置を検出する位置情報センサと、
前記自動作業を開始するための開始位置を算出し、前記位置情報センサが検出した前記作業機械の前記現在位置と算出した前記開始位置とに基づいて前記現在位置から前記開始位置までの走行経路を生成するコントローラと、を備える、作業機械。
【請求項10】
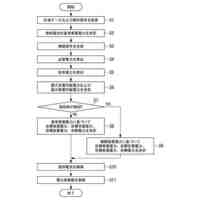
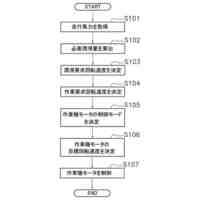
掘削対象を掘削し、掘削された掘削物を積込対象に積み込む一連の作業を自動化した自動作業を実行する、作業機械の自動走行制御方法であって、
前記作業機械の現在位置を検出するステップと、
前記自動作業を開始するための開始位置を算出するステップと、
取得した前記作業機械の前記現在位置と算出した前記開始位置とに基づいて前記現在位置から前記開始位置までの走行経路を生成するステップと、を備える、作業機械の自動走行制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
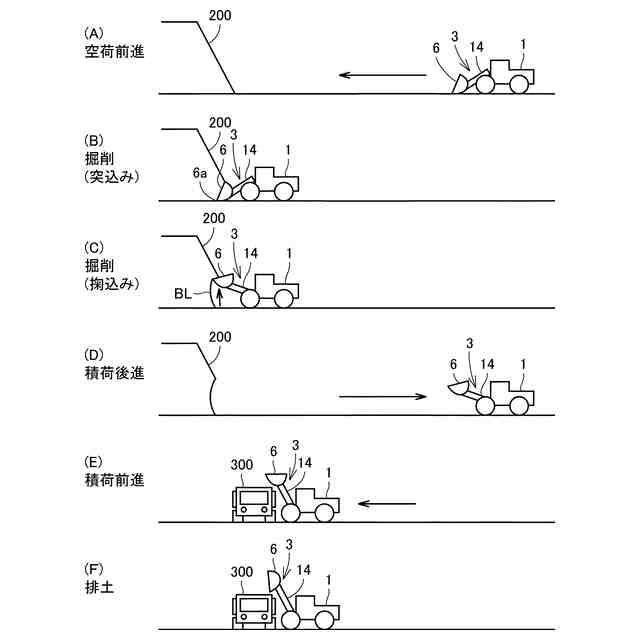
たとえば特開平10-88625号公報(特許文献1)には、掘削から、積込み時のダンプアプローチ、ダンプへの積込までの一連の作業を自動で実行することができるホイールローダが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平10-88625号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
一連の作業を自動化した自動作業を開始するに際し、開始位置(初期位置)にホイールローダなどの作業機械を正確に位置決めする必要がある。手動(遠隔操作を含む)で位置決めすることは煩雑な作業である。
【0005】
本開示の目的は、自動作業の開始位置への移動を自動で行う作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法を提供することである。
【課題を解決するための手段】
【0006】
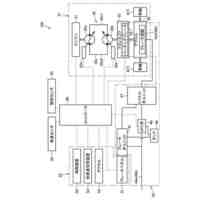
本開示の作業機械を含むシステムは、掘削対象を掘削し、掘削された掘削物を積込対象に積み込む一連の作業を自動化した自動作業を実行し、位置情報センサと、コントローラとを備える。位置情報センサは、作業機械の現在位置を検出する。コントローラは、位置情報センサが検出した作業機械の現在位置と自動作業を開始するための開始位置とから現在位置から開始位置までの走行経路を生成する。
【0007】
本開示の作業機械は、掘削対象を掘削し、掘削された掘削物を積込対象に積み込む一連の作業を自動化した自動作業を実行する。本開示の作業機械は、位置情報センサと、コントローラとを備える。位置情報センサは、作業機械の現在位置を検出する。コントローラは、自動作業を開始するための開始位置を算出し、位置情報センサが検出した作業機械の現在位置と算出した開始位置とに基づいて現在位置から開始位置までの走行経路を生成する。
【0008】
本開示の作業機械の自動走行制御方法は、掘削対象を掘削し、掘削された掘削物を積込対象に積み込む一連の作業を自動化した自動作業を実行する。本開示の作業機械の自動走行制御方法は、以下のステップを備える。
【0009】
作業機械の現在位置が検出される。自動作業を開始するための開始位置が算出される。取得した作業機械の現在位置と算出した開始位置とに基づいて現在位置から開始位置までの走行経路が生成される。
【発明の効果】
【0010】
本開示によれば、自動作業の開始位置への移動を自動で行う作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法を実現することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業車両
12日前
株式会社小松製作所
作業車両
12日前
株式会社小松製作所
作業機械および方法
1日前
株式会社小松製作所
作業機械および方法
1日前
株式会社小松製作所
作業機械および方法
1日前
株式会社小松製作所
作業機械および方法
2日前
株式会社小松製作所
発注システムおよび発注方法
3日前
株式会社小松製作所
発注システムおよび発注方法
3日前
株式会社小松製作所
作業車両および作業車両の制御方法
1日前
株式会社小松製作所
作業機械および作業機械の制御方法
1日前
株式会社小松製作所
作業車両用作動油タンク及び作業車両
9日前
トヨタ自動車株式会社
運行管理装置
15日前
株式会社小松製作所
システム、作業機械、および制御方法
1日前
株式会社小松製作所
作業車両の制御システム及び作業車両
1日前
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
2日前
トヨタ自動車株式会社
車両走行管理装置
15日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
2日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
2日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1日前
株式会社小松製作所
作業機械、及び、作業機械を制御するための方法
4日前
株式会社小松製作所
散水システム、作業機械および散水装置の制御方法
3日前
株式会社小松製作所
散水システム、散水機械および散水装置の制御方法
3日前
株式会社小松製作所
感情推定装置、感情推定方法および遠隔操作システム
4日前
株式会社小松製作所
作業機械を制御するためのシステム、方法、及び作業機械
12日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
3日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
3日前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
10日前
株式会社小松製作所
作業機械の暖房装置、および作業機械の暖房装置の制御方法
2日前
株式会社小松製作所
作業機械の表示システム、作業機械、及び作業機械の表示方法
3日前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1日前
株式会社小松製作所
故障した作業機械の故障原因を診断するためのシステム及び方法
12日前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
1日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
1日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
2日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
2日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ