TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025147778
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048191
出願日
2024-03-25
発明の名称
感情推定装置、感情推定方法および遠隔操作システム
出願人
株式会社小松製作所
代理人
弁理士法人志賀国際特許事務所
主分類
E02F
9/26 20060101AFI20250930BHJP(水工;基礎;土砂の移送)
要約
【課題】作業中のオペレータの感情を適切に推定する。
【解決手段】効率評価部は、オペレータが操作する作業機械の作業に係る作業効率の評価値を算出する。取得部は、作業の間に計測されたオペレータのバイタルデータを取得する。推定部は、評価値とバイタルデータとに基づいて、作業の実施時におけるオペレータの感情を推定する。
【選択図】図4
特許請求の範囲
【請求項1】
オペレータが操作する作業機械の作業に係る作業効率の評価値を算出する効率評価部と、
前記作業の間に計測された前記オペレータのバイタルデータを取得する取得部と、
前記評価値と前記バイタルデータとに基づいて、前記オペレータの感情を推定する推定部と
を備える感情推定装置。
続きを表示(約 800 文字)
【請求項2】
前記推定部は、前記オペレータが前記作業機械を操作している状態における、前記オペレータの感情を推定する
請求項1に記載の感情推定装置。
【請求項3】
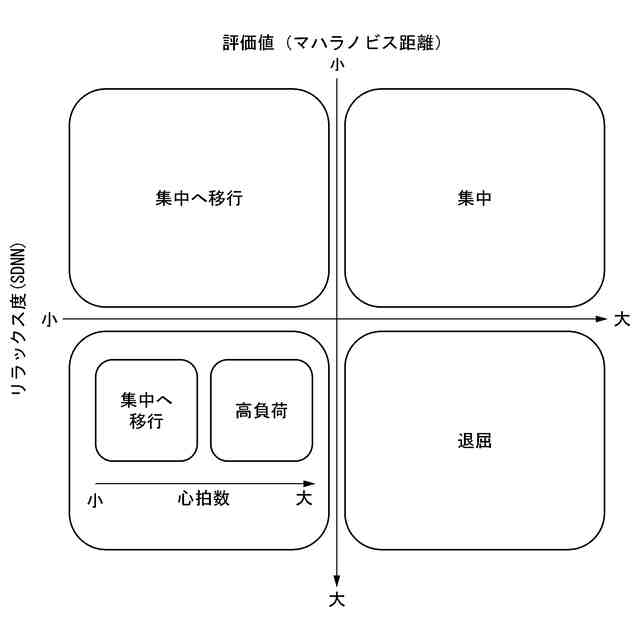
前記推定部は、前記作業における集中の度合いを推定する
請求項1に記載の感情推定装置。
【請求項4】
推定された前記感情に基づく情報を出力する出力部
を備える請求項1に記載の感情推定装置。
【請求項5】
前記効率評価部は、前記作業に係る前記オペレータによる操作装置の操作量に基づいて、前記評価値を算出する
請求項1に記載の感情推定装置。
【請求項6】
前記評価値は、前記操作装置の操作量のマハラノビス距離である
請求項5に記載の感情推定装置。
【請求項7】
前記効率評価部は、前記オペレータに応じた単位空間を用いて、前記操作装置の操作量のマハラノビス距離を算出する
請求項6に記載の感情推定装置。
【請求項8】
前記推定部は、前記オペレータの感情を退屈、集中へ移行、集中、高負荷の何れかに分類する
請求項1に記載の感情推定装置。
【請求項9】
前記推定部は、前記オペレータが前記高負荷であり、前記高負荷が一定以上継続した場合、前記オペレータは過負荷であると推定する
請求項8に記載の感情推定装置。
【請求項10】
オペレータが操作する作業機械の作業に係る作業効率の評価値を算出するステップと、
前記作業の間に計測された前記オペレータのバイタルデータを取得するステップと、
前記評価値と前記バイタルデータとに基づいて、前記オペレータの感情を推定するステップと
を備える感情推定方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、感情推定装置、感情推定方法および遠隔操作システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、オペレータが作業機械を操作しているときの脈波データに基づいて、アクチュエータの応答特性を変化させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2017-158841号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人は、ストレスがかかると交感神経が優位となることが知られている。一方で、人は、集中する直前に、一時的にストレスが高くなることがある。そのため、作業機械を操作している場合、疲労によるストレス、または作業に集中する前のストレス等、オペレータの感情を脈波などのバイタルデータのみからは推定できない可能性がある。
本開示の目的は、作業中のオペレータの感情を適切に推定することができる感情推定装置、感情推定方法および遠隔操作システムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、感情推定装置は、オペレータが操作する作業機械の作業に係る作業効率の評価値を算出する効率評価部と、前記作業の間に計測された前記オペレータのバイタルデータを取得する取得部と、前記評価値と前記バイタルデータとに基づいて、前記オペレータの感情を推定する推定部とを備える。
【発明の効果】
【0006】
上記態様によれば、感情推定装置は作業中のオペレータの感情を適切に推定することができる。
【図面の簡単な説明】
【0007】
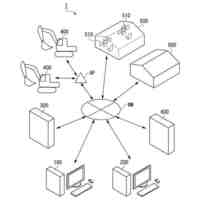
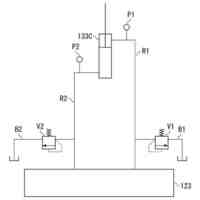
第一実施形態に係る作業機械の構成を示す概略図である。
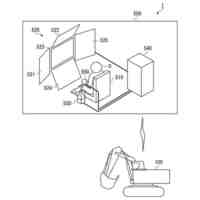
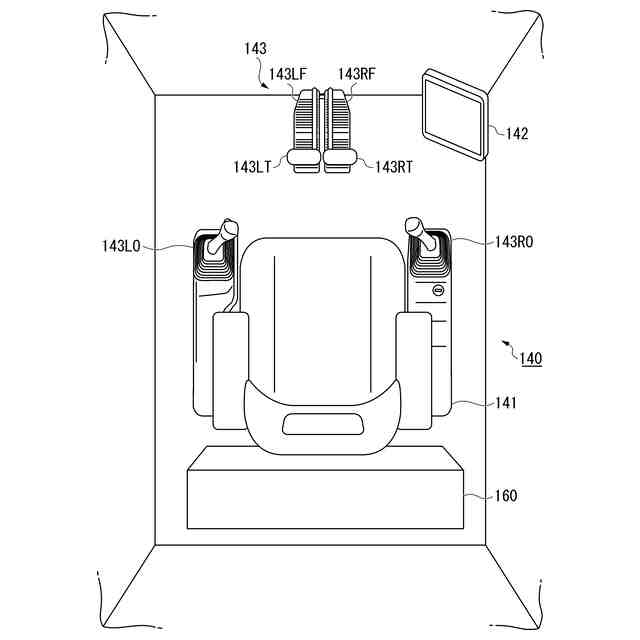
第一実施形態に係る運転室の内部の構成を示す図である。
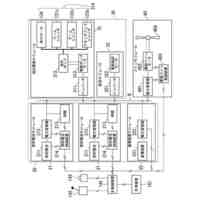
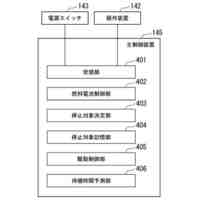
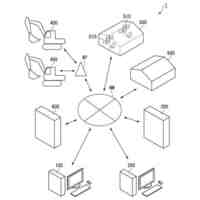
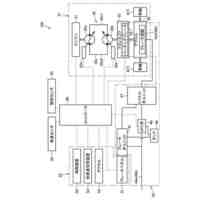
第一実施形態に係る制御装置の構成を示す概略ブロック図である。
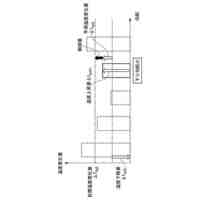
第一実施形態に係る感情の推定方法を示す図である。
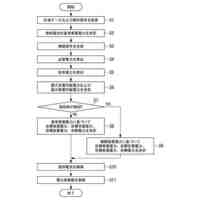
第一実施形態に係る制御装置による感情の推定方法を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら実施形態について詳しく説明する。
〈第一実施形態〉
《作業機械100の構成》
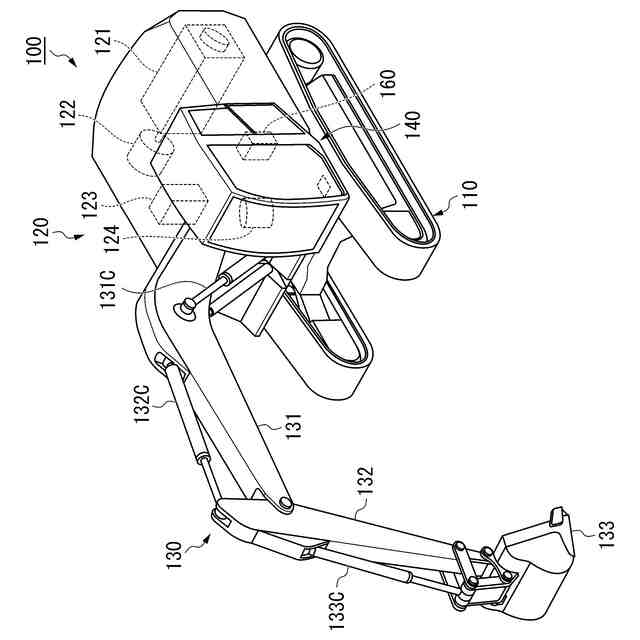
図1は、第一実施形態に係る作業機械100の構成を示す概略図である。作業機械100は、施工現場にて稼働し、土砂などの施工対象を掘削し、荷としてダンプトラックなどの積込対象のベッセルなど荷台に積み込む。作業機械100の例としては、フェイスショベル、バックホウショベル、ロープショベルなどが挙げられる。また作業機械100は電動駆動するものであってもよいし、油圧駆動するものであってもよい。第一実施形態に係る作業機械100は、バックホウショベルである。作業機械100は、走行体110、旋回体120、作業機130及び運転室140を備える。
【0009】
走行体110は、作業機械100を走行可能に支持する。走行体110は、左右に設けられた2つの無限軌道と、各無限軌道を駆動するための走行モータを備える。
旋回体120は、走行体110に旋回中心回りに旋回可能に支持される。
作業機130は、油圧により駆動する。作業機130は、旋回体120の前部に上下方向に駆動可能に支持される。
運転室140は、オペレータが搭乗し、作業機械100の操作を行うためのスペースである。
【0010】
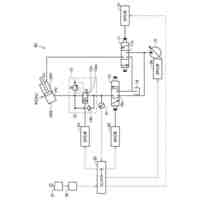
《旋回体120の構成》
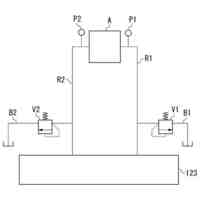
旋回体120は、エンジン121、油圧ポンプ122、コントロールバルブ123、旋回モータ124を備える。
エンジン121は、油圧ポンプ122を駆動する原動機である。エンジン121は、動力源の一例である。
油圧ポンプ122は、エンジン121により駆動される可変容量ポンプである。油圧ポンプ122は、コントロールバルブ123を介して作業機械100を駆動させる各アクチュエータに作動油を供給する。
コントロールバルブ123は、油圧ポンプ122から供給される作動油の流量を制御する。
旋回モータ124は、コントロールバルブ123を介して油圧ポンプ122から供給される作動油によって駆動し、旋回体120を旋回させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
12日前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
磁気結合型リアクトル
12日前
株式会社小松製作所
評価装置および評価方法
7日前
株式会社小松製作所
発注システムおよび発注方法
1か月前
株式会社小松製作所
発注システムおよび発注方法
1か月前
株式会社小松製作所
制御システムおよび制御方法
12日前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業車両および作業車両の制御方法
1か月前
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
1か月前
株式会社小松製作所
システム、作業機械、および制御方法
1か月前
株式会社小松製作所
作業車両の制御システム及び作業車両
1か月前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
12日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
12日前
株式会社小松製作所
散水システム、散水機械および散水装置の制御方法
1か月前
株式会社小松製作所
散水システム、作業機械および散水装置の制御方法
1か月前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
12日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
12日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
12日前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
1か月前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
作業機械の暖房装置、および作業機械の暖房装置の制御方法
1か月前
株式会社小松製作所
作業機械、作業機械を含むシステム、および作業機械の制御方法
1か月前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1か月前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
1か月前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
13日前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ