TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150703
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051731
出願日
2024-03-27
発明の名称
作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の劣化を抑制すること。
【解決手段】作業機械の制御システムは、コントローラを備える。コントローラは、作業機械が有する作業機の高さが所定高さ以上であるか否かを判定する姿勢判定部と、作業機の高さが所定高さ以上であると判定された場合、作業機のバケットがチルト動作とダンプ動作とを繰り返す所定動作の有無を判定する動作判定部と、所定動作が有ったと判定され所定動作の動作速度が閾値を超過したと判定した場合、動作速度が閾値以下になるように制御指令を出力する作業機制御部と、を有する。
【選択図】図5
特許請求の範囲
【請求項1】
コントローラを備え、
前記コントローラは、
作業機械が有する作業機の高さが所定高さ以上であるか否かを判定する姿勢判定部と、
前記作業機の高さが所定高さ以上であると判定された場合、前記作業機のバケットがチルト動作とダンプ動作とを繰り返す所定動作の有無を判定する動作判定部と、
前記所定動作が有ったと判定され前記所定動作の動作速度が閾値を超過したと判定した場合、前記動作速度が閾値以下になるように制御指令を出力する作業機制御部と、を有する、
作業機械の制御システム。
続きを表示(約 1,100 文字)
【請求項2】
前記姿勢判定部は、前記作業機の姿勢を検出する作業機姿勢センサの検出データに基づいて、前記作業機の高さが所定高さ以上であるか否かを判定する、
請求項1に記載の作業機械の制御システム。
【請求項3】
前記姿勢判定部は、前記バケットの底面が前方に向かって下方に傾斜しているか否かを判定する、
請求項1に記載の作業機械の制御システム。
【請求項4】
前記作業機械は、前輪と後輪とを有し、
前記前輪の回転軸と前記後輪の回転軸とを結ぶラインを規定ラインとした場合、
前記姿勢判定部は、前記バケットの底面が前記規定ラインに対して前方に向かって下方に傾斜しているか否かを判定する、
請求項3に記載の作業機械の制御システム。
【請求項5】
前記作業機は、前記作業機械の車体に第1回動軸を中心に回動可能に連結されるブームを有し、前記バケットは、前記ブームに第2回動軸を中心に回動可能に連結され、
前記姿勢判定部は、前記第2回動軸が前記第1回動軸よりも上方に配置されているか否かを判定する、
請求項4に記載の作業機械の制御システム。
【請求項6】
前記動作判定部は、前記バケットを動作させるために操作されるバケットレバーからの操作信号に基づいて、前記所定動作の有無を判定する、
請求項1に記載の作業機械の制御システム。
【請求項7】
前記バケットレバーが前記バケットレバーの中立位置よりも一方側に操作されることにより前記バケットがチルト動作し、前記中立位置よりも他方側に操作されることにより前記バケットがダンプ動作し、
前記動作判定部は、前記バケットレバーが前記中立位置よりも一方側と他方側とに往復操作された回数が所定時間において所定回数以上であると判定した場合、前記所定動作が有ると判定する、
請求項6に記載の作業機械の制御システム。
【請求項8】
前記動作判定部は、前記操作信号の振幅に基づいて、前記所定動作の動作速度が前記閾値を超過したか否かを判定する、
請求項7に記載の作業機械の制御システム。
【請求項9】
前記作業機制御部は、前記バケットレバーからの操作信号が取得されている状態で、前記操作信号の振幅が小さくなるように、前記制御指令を出力する、
請求項8に記載の作業機械の制御システム。
【請求項10】
請求項1に記載の作業機械の制御システムを備える、
作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の制御システム、作業機械、作業機械の遠隔操作システム、及び作業機械の制御方法に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
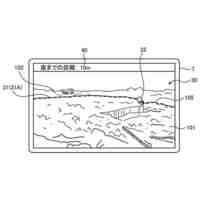
作業機械に係る技術分野において、特許文献1に開示されているような、ホイールローダの遠隔操作システムが知られている。特許文献1において、ホイールローダは、カメラ及びアンテナを有する。ホイールローダのオンボードコントローラは、アンテナを介してオフボードコントローラからのリモート信号を受信する。オフボードコントローラは、カメラからのカメラ画像を受信してディスプレイに表示させる。
【先行技術文献】
【特許文献】
【0003】
欧州特許出願公開第3926107号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業機械は、作業機を有する。オペレータによって操作される操作装置からの操作信号に基づいて作業機が動作する場合、操作装置が激しく操作されると、作業機が激しく動作する。作業機が激しく動作すると、作業機械が早期に劣化する可能性がある。
【0005】
本開示は、作業機械の劣化を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、コントローラを備える作業機械の制御システムが提供される。コントローラは、作業機械が有する作業機の高さが所定高さ以上であるか否かを判定する姿勢判定部と、作業機の高さが所定高さ以上であると判定された場合、作業機のバケットがチルト動作とダンプ動作とを繰り返す所定動作の有無を判定する動作判定部と、所定動作が有ったと判定され所定動作の動作速度が閾値を超過したと判定した場合、動作速度が閾値以下になるように制御指令を出力する作業機制御部と、を有する。
【発明の効果】
【0007】
本開示によれば、作業機械の劣化が抑制される。
【図面の簡単な説明】
【0008】
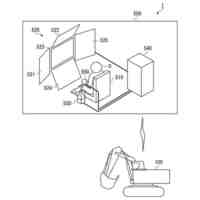
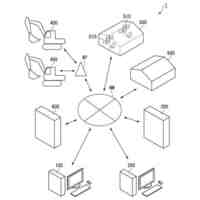
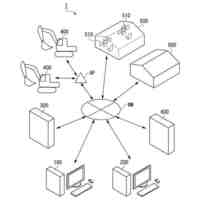
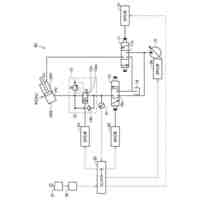
図1は、実施形態に係る作業機械の遠隔操作システムを示す図である。
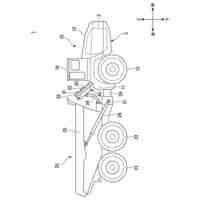
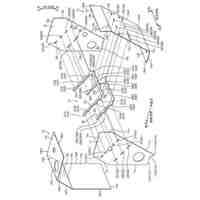
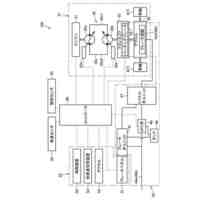
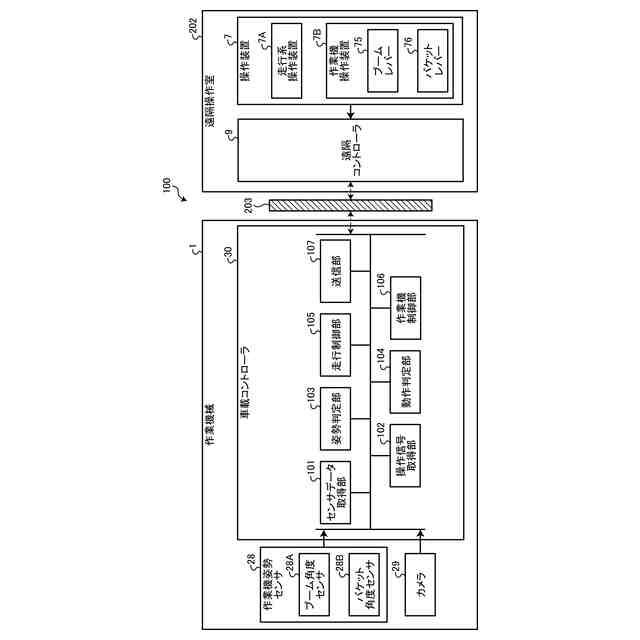
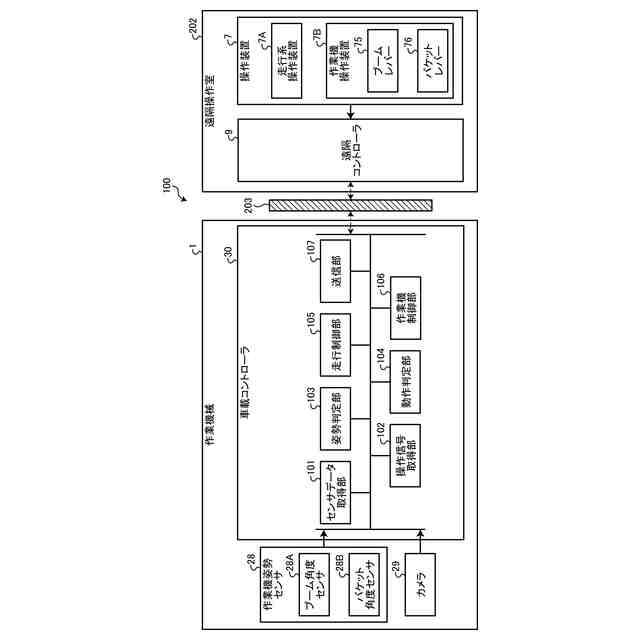
図2は、実施形態に係る作業機械及び操作装置を示す構成図である。
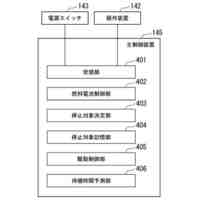
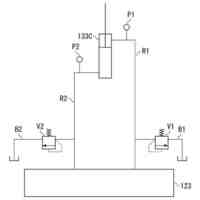
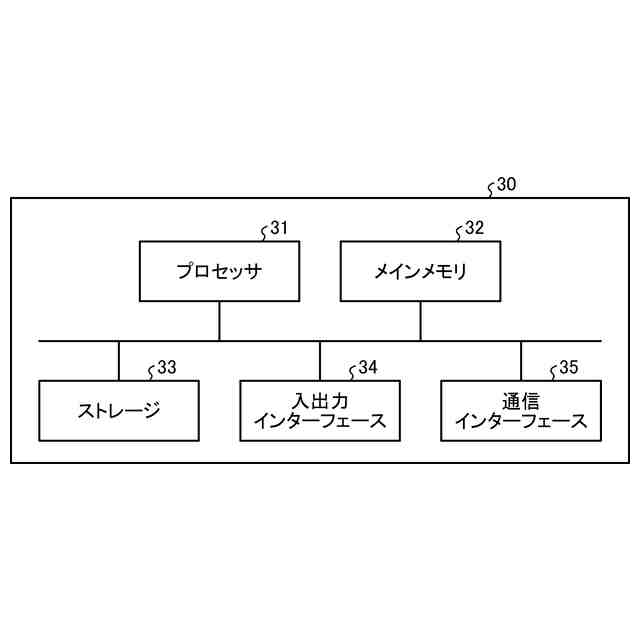
図3は、実施形態に係る車載コントローラを示すハードウエア構成図である。
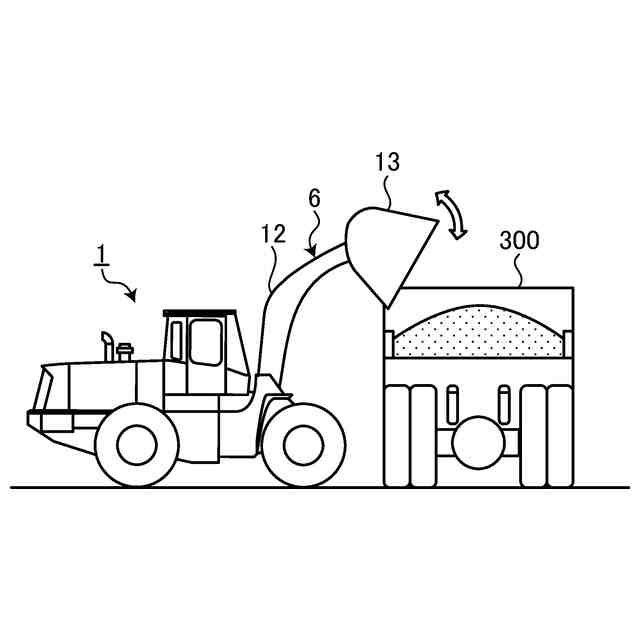
図4は、実施形態に係る作業機械の動作を説明する図である。
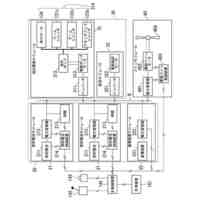
図5は、実施形態に係る作業機械の制御システムを示す機能ブロック図である。
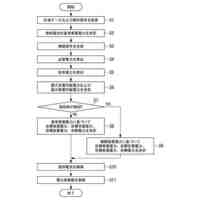
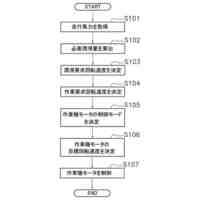
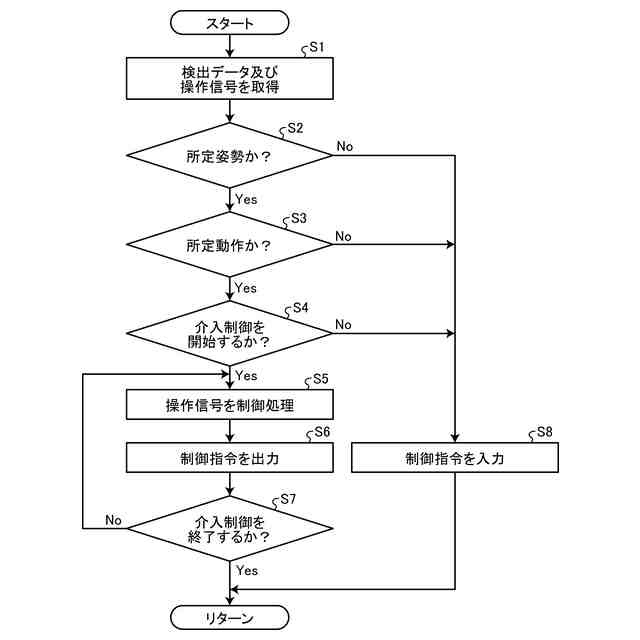
図6は、実施形態に係る作業機械の制御方法を示すフローチャートである。
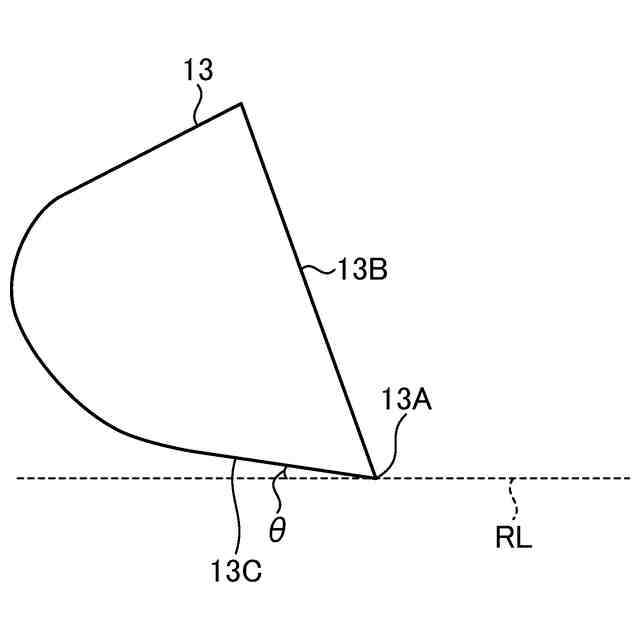
図7は、実施形態に係る作業機の姿勢を説明する図である。
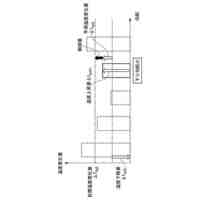
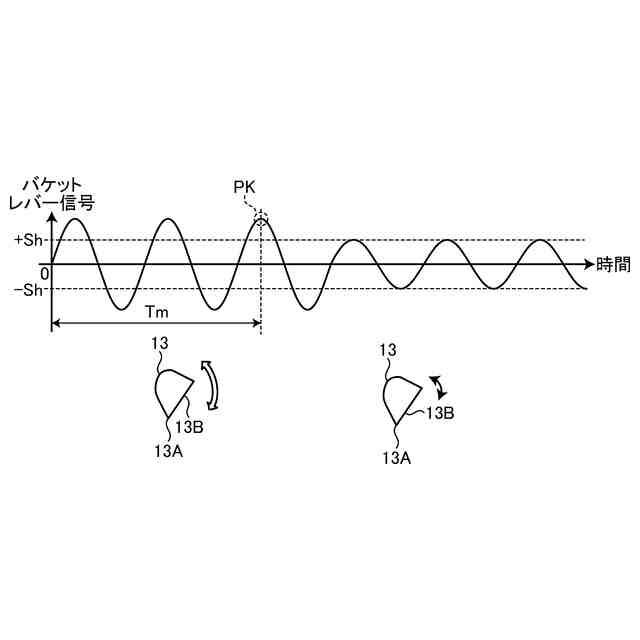
図8は、実施形態に係るバケットレバーからの操作信号の一例を示す図である。
図9は、実施形態に係るバケットレバーからの操作信号の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[遠隔操作システム]
図1は、実施形態に係る作業機械1の遠隔操作システム200を示す図である。遠隔操作システム200は、作業現場201に存在する作業機械1を遠隔操作する。遠隔操作システム200の少なくとも一部は、作業機械1の外部に設けられた遠隔操作室202に配置される。遠隔操作システム200は、操作装置7と、表示装置8と、遠隔コントローラ9とを備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業車両
1か月前
株式会社小松製作所
作業車両
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
11日前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
磁気結合型リアクトル
11日前
株式会社小松製作所
評価装置および評価方法
6日前
株式会社小松製作所
制御システムおよび制御方法
11日前
株式会社小松製作所
発注システムおよび発注方法
1か月前
株式会社小松製作所
発注システムおよび発注方法
1か月前
株式会社小松製作所
作業車両および作業車両の制御方法
1か月前
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業車両の制御システム及び作業車両
1か月前
株式会社小松製作所
システム、作業機械、および制御方法
1か月前
株式会社小松製作所
作業車両用作動油タンク及び作業車両
1か月前
株式会社小松製作所
油圧駆動システムおよび油圧駆動方法
1か月前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
11日前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械システムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業機械、及び、作業機械を制御するための方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
11日前
株式会社小松製作所
散水システム、作業機械および散水装置の制御方法
1か月前
株式会社小松製作所
散水システム、散水機械および散水装置の制御方法
1か月前
株式会社小松製作所
感情推定装置、感情推定方法および遠隔操作システム
1か月前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
11日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
11日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
11日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械、作業機械のシステムおよび作業機械の制御方法
1か月前
株式会社小松製作所
作業機械の暖房装置、および作業機械の暖房装置の制御方法
1か月前
株式会社小松製作所
作業機械の画像表示システムおよび作業機械の画像表示方法
1か月前
株式会社小松製作所
作業機械の表示システム、作業機械、及び作業機械の表示方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ