TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025168942
公報種別
公開特許公報(A)
公開日
2025-11-12
出願番号
2024073825
出願日
2024-04-30
発明の名称
評価装置および評価方法
出願人
株式会社小松製作所
,
国立研究開発法人産業技術総合研究所
代理人
弁理士法人志賀国際特許事務所
主分類
A61B
10/00 20060101AFI20251105BHJP(医学または獣医学;衛生学)
要約
【課題】動揺酔いの程度を評価する。
【解決手段】取得部は、利用者のバイタルデータから算出された、利用者の交感神経または副交感神経の活性の度合いを示す活性指標値を取得する。評価部は、活性指標値の時系列に係る分布度に基づいて、利用者の動揺酔いの程度を評価する。
【選択図】図1
特許請求の範囲
【請求項1】
利用者のバイタルデータから算出された、前記利用者の交感神経または副交感神経の活性の度合いを示す活性指標値を取得する取得部と、
前記活性指標値の時系列に係る分布度に基づいて、前記利用者の動揺酔いの程度を評価する評価部と、
を備える評価装置。
続きを表示(約 800 文字)
【請求項2】
前記利用者は、作業機械を運転するオペレータであり、
前記取得部は、前記作業機械の運転中における前記利用者のバイタルデータから算出された前記活性指標値を取得する
請求項1に記載の評価装置。
【請求項3】
前記利用者は、前記作業機械の遠隔操作において、前記作業機械に搭載された撮像装置が撮像した映像が表示されるディスプレイを視認しながら、前記作業機械を遠隔操作するオペレータであって、
前記取得部は、前記ディスプレイの視認中における前記利用者のバイタルデータから算出された前記活性指標値を取得する
請求項2に記載の評価装置。
【請求項4】
前記取得部は、前記利用者のバイタルデータを取得し、取得した前記バイタルデータから前記活性指標値を算出する、
請求項1に記載の評価装置。
【請求項5】
前記活性指標値は、ローレンツプロットのm指標、ローレンツプロットのS指標、CVrrまたはLF/HFである、
請求項1に記載の評価装置。
【請求項6】
前記評価部は、前記活性指標値の時系列における最大値と最小値との差に基づいて、前記利用者の動揺酔いの程度を評価する、
請求項1に記載の評価装置。
【請求項7】
前記評価部は、前記利用者の動揺酔いの程度を示す評価値が閾値を超えるか否かを判定し、前記評価値が前記閾値を超える場合、評価結果を出力する
請求項6に記載の評価装置。
【請求項8】
利用者のバイタルデータから、前記利用者の交感神経または副交感神経の活性の度合いを示す活性指標値を算出するステップと、
前記活性指標値の時系列に係る分布度に基づいて、前記利用者の動揺酔いの程度を評価するステップと、
を備える評価方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、評価装置および評価方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
作業機械を遠隔操作する技術が知られている。遠隔操作においては操作室のオペレータが画像を見て操作を行う。作業機械は稼働に伴って動作するため、オペレータが視認する画像はこの運動の影響で揺れ等が生じる。一方で、遠隔操作の環境は静止しており、オペレータの視覚による認識と、オペレータの体感とに乖離があることから、映像酔い(シミュレータ酔い)が引き起こされる可能性があり、映像酔いの解消が課題となっている(例えば、特許文献1を参照)。また、オペレータが作業機械に搭乗する場合も、乗り物酔いが引き起こされる可能性がある。乗り物酔い、映像酔いなどの症状を、「動揺酔い(motion sickness)」と呼ぶ。つまり、動揺酔いとの語は、実際の動揺がない疑似動揺酔いも含む。
動揺酔いの程度の評価方法として、主観的評価であるSSQ(Simulator sickness questionnaire)が知られている。
【先行技術文献】
【特許文献】
【0003】
特開2023-107567号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、客観的に動揺酔いの程度を評価する方法は確立されていない。本開示の目的は、動揺酔いの程度を評価することができる評価装置および評価方法を提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様によれば、評価装置は、利用者のバイタルデータから算出された、前記利用者の交感神経または副交感神経の活性の度合いを示す活性指標値を取得する取得部と、前記活性指標値の時系列に係る分布度に基づいて、前記利用者の動揺酔いの程度を評価する評価部と、を備える。
【発明の効果】
【0006】
上記態様によれば、評価装置は、動揺酔いの程度を評価することができる。
【図面の簡単な説明】
【0007】
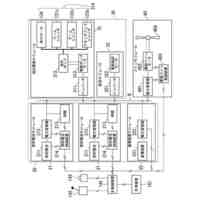
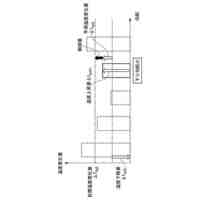
第一実施形態に係る遠隔操作システムの構成を示す概略図である。
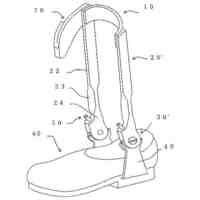
第一実施形態に係る作業機械の外観図である。
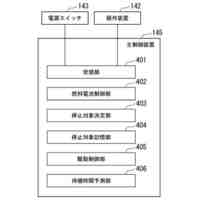
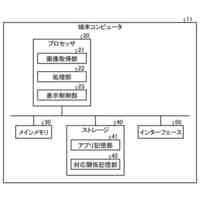
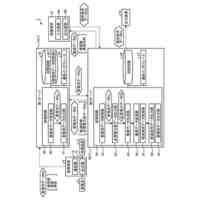
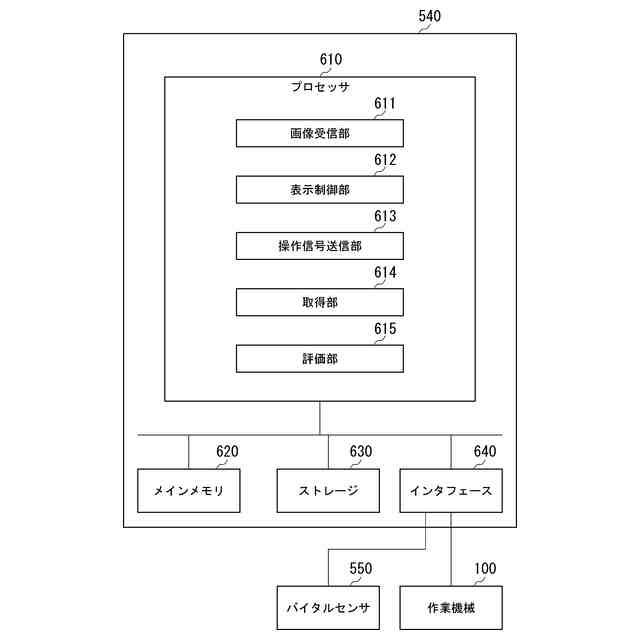
第一実施形態に係る遠隔操作装置の制御装置の構成を示す概略ブロック図である。
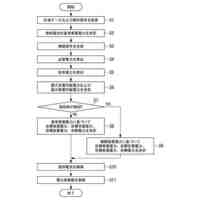
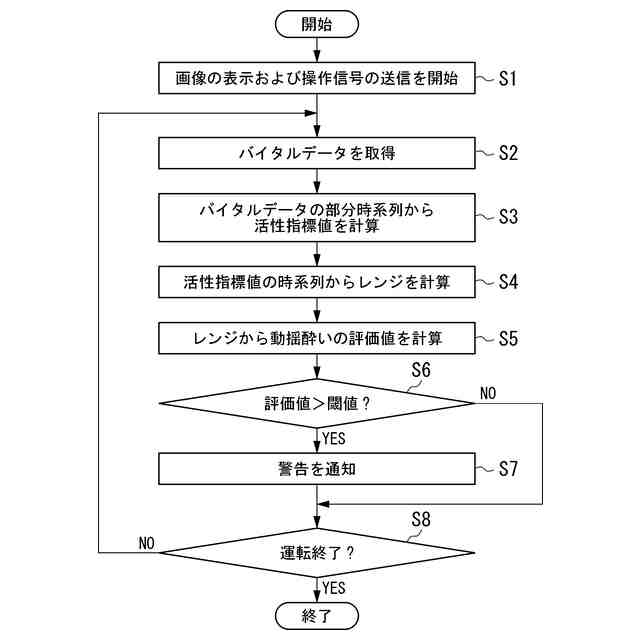
第一実施形態に係る遠隔操作装置による動揺酔いの評価方法を示すフローチャートである。
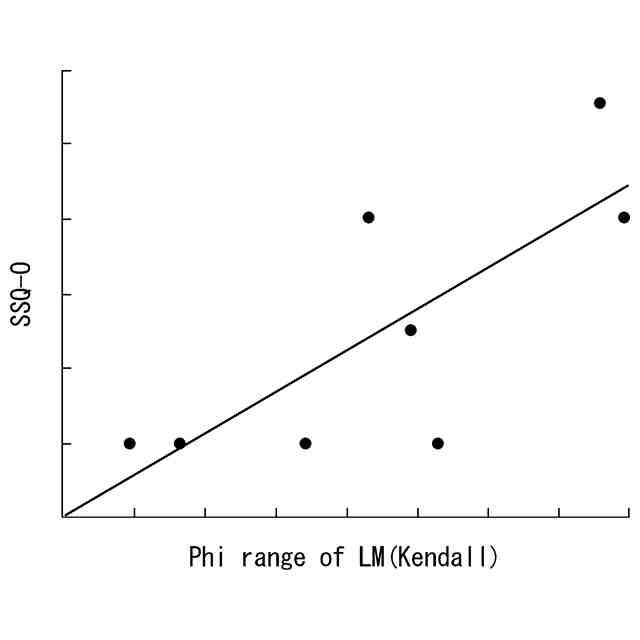
実験において相関関係が確認されたφ
range
とSSQの因子の得点との関係を示す図である。
【発明を実施するための形態】
【0008】
〈第一実施形態〉
《システム》
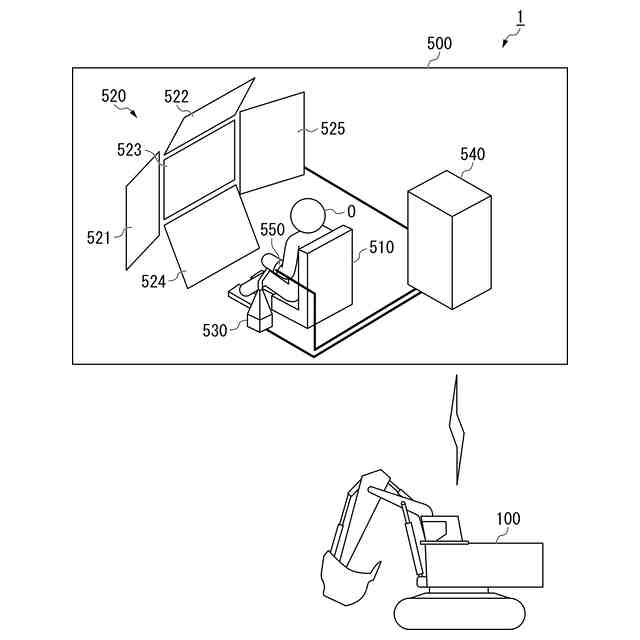
図1は、第一実施形態に係る遠隔操作システムの構成を示す概略図である。
遠隔操作システム1は、遠隔操作によって動作する作業機械100と、遠隔操作装置500とを備える。作業機械100は、作業現場(例えば、鉱山、採石場)に設けられる。遠隔操作装置500は、作業現場または作業現場から離れた地点(例えば、市街、作業現場内)の遠隔操作室に設けられる。作業機械100と遠隔操作装置500とは、インターネットなどのネットワークを介して接続される。
遠隔操作システム1は、遠隔操作装置500を用いて作業機械100を操作するためのシステムである。
【0009】
作業機械100は、遠隔操作装置500から受信する操作信号に従って動作する。
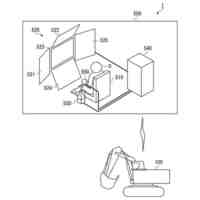
遠隔操作装置500の操作装置530のレバーやペダルがオペレータOによって操作されることにより、作業機、旋回、走行操作などの操作信号が生成される。生成された操作信号は、作業機械100に送信される。作業機械100を運転するオペレータOは、利用者の一例である。
【0010】
《作業機械》
図2は、第一実施形態に係る作業機械の外観図である。
第一実施形態に係る作業機械100は、油圧ショベルである。なお、作業機械100は、油圧ショベル以外の例えばホイールローダ、ブルドーザ等の作業機械であってもよい。作業機械100は、油圧により作動する作業機110と、作業機110を支持する旋回体120と、旋回体120を支持する走行体130とを備える。走行体130は、例えば、履帯である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
13日前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
作業機械および方法
1か月前
株式会社小松製作所
磁気結合型リアクトル
13日前
株式会社小松製作所
評価装置および評価方法
8日前
株式会社小松製作所
制御システムおよび制御方法
13日前
株式会社小松製作所
作業機械および作業機械の制御方法
今日
株式会社小松製作所
作業機械および作業機械の制御方法
今日
株式会社小松製作所
作業機械および作業機械の制御方法
1か月前
株式会社小松製作所
作業車両および作業車両の制御方法
1か月前
株式会社小松製作所
システム、作業機械、および制御方法
1か月前
株式会社小松製作所
作業車両の制御システム及び作業車両
1か月前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
13日前
株式会社小松製作所
作業機械の点検支援システム及び点検支援方法
1か月前
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
13日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
13日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
13日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
13日前
株式会社小松製作所
認証情報表示システム、情報端末、及び認証情報表示方法
1か月前
株式会社小松製作所
表示制御装置、情報端末、表示制御方法、及び表示制御システム
1か月前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
14日前
株式会社小松製作所
作業機械を含むシステム、作業機械、および作業機械の自動走行制御方法
1か月前
株式会社小松製作所
管理システム及び管理方法
今日
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
今日
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
今日
個人
貼付剤
24日前
個人
簡易担架
6日前
個人
腋臭防止剤
6日前
個人
短下肢装具
4か月前
個人
足踏み器具
13日前
個人
排尿補助器具
1か月前
個人
洗井間専家。
7か月前
個人
前腕誘導装置
4か月前
個人
嚥下鍛錬装置
4か月前
個人
バッグ式オムツ
5か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ