TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025170917
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024075780
出願日
2024-05-08
発明の名称
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
E02F
9/20 20060101AFI20251113BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の転倒を抑制すること。
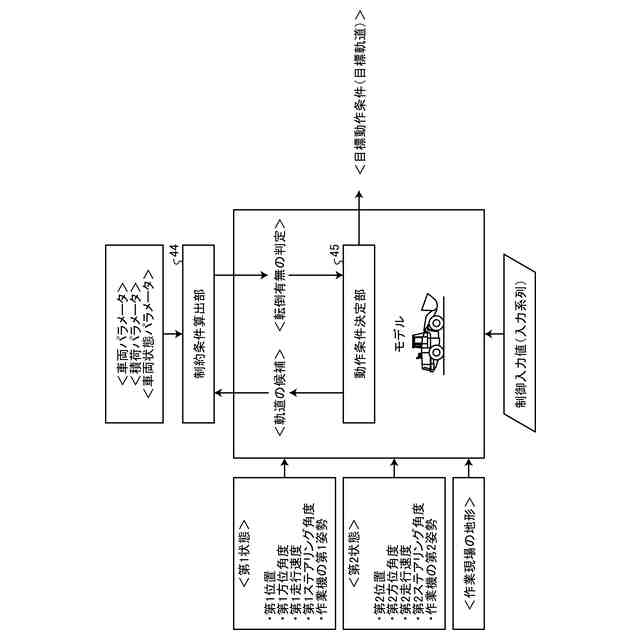
【解決手段】作業機械の動作条件決定システムは、コンピュータを備える。コンピュータは、作業機械の第1位置を含む第1状態を取得する第1状態取得部と、作業機械の第2位置を含む第2状態を取得する第2状態取得部と、第1位置から第2位置までの作業機械の移動において作業機械が有する走行装置を制御する走行入力値及び作業機械が有する作業機を制御する作業入力値を含む制御入力値を生成する制御入力値生成部と、第1状態と第2状態と制御入力値とを作業機械のモデルに入力して、移動において作業機械が転倒しない制約条件を満足するように、第1位置から第2位置までの走行装置の目標走行条件及び作業機の目標作業条件を含む作業機械の目標動作条件を決定する動作条件決定部と、を有する。
【選択図】図6
特許請求の範囲
【請求項1】
コンピュータを備え、
前記コンピュータは、
作業機械の第1位置を含む第1状態を取得する第1状態取得部と、
前記作業機械の第2位置を含む前記第1状態よりも後の第2状態を取得する第2状態取得部と、
前記第1位置から前記第2位置までの前記作業機械の移動において前記作業機械が有する走行装置を制御する走行入力値及び前記作業機械が有する作業機を制御する作業入力値を含む制御入力値を生成する制御入力値生成部と、
前記第1状態と前記第2状態と前記制御入力値とを前記作業機械のモデルに入力して、前記移動において前記作業機械が転倒しない制約条件を満足するように、前記第1位置から前記第2位置までの前記走行装置の目標走行条件及び前記作業機の目標作業条件を含む前記作業機械の目標動作条件を決定する動作条件決定部と、を有する、
作業機械の動作条件決定システム。
続きを表示(約 1,100 文字)
【請求項2】
前記目標走行条件は、前記第1位置から前記第2位置までの前記走行装置の目標軌道を含む、
請求項1に記載の作業機械の動作条件決定システム。
【請求項3】
前記目標走行条件は、前記目標軌道の複数のポイントのそれぞれにおける前記走行装置の目標方位角度、目標走行速度、及び目標ステアリング角度を含む、
請求項2に記載の作業機械の動作条件決定システム。
【請求項4】
前記目標作業条件は、前記目標軌道の複数のポイントのそれぞれにおける前記作業機の目標姿勢を含む、
請求項2に記載の作業機械の動作条件決定システム。
【請求項5】
前記制約条件は、前記走行装置の複数の接地点に基づいて設定された設定範囲から前記作業機械のゼロモーメントポイントが逸脱しない条件を含む、
請求項1に記載の作業機械の動作条件決定システム。
【請求項6】
前記コンピュータは、
前記制約条件を算出する制約条件算出部を有し、
前記制約条件算出部は、前記作業機が保持する積荷の状態に基づいて、前記制約条件を算出する、
請求項5に記載の作業機械の動作条件決定システム。
【請求項7】
前記動作条件決定部は、前記第2状態と前記目標軌道の最終位置における前記作業機械の状態との偏差に係る評価項目を含む評価関数を演算して、前記評価関数の評価値の度合いが良くなるように、前記目標動作条件を決定する、
請求項2に記載の作業機械の動作条件決定システム。
【請求項8】
前記評価関数は、前記制御入力値に係る評価項目を含む、
請求項7に記載の作業機械の動作条件決定システム。
【請求項9】
請求項1に記載の作業機械の動作条件決定システムを備える、
作業機械。
【請求項10】
コンピュータが、
作業機械の第1位置を含む第1状態を取得することと、
前記作業機械の第2位置を含む第2状態を取得することと、
前記第1位置から前記第2位置までの前記作業機械の移動において前記作業機械が有する走行装置を制御する走行入力値及び前記作業機械が有する作業機を制御する作業入力値を含む制御入力値を生成することと、
前記第1状態と前記第2状態と前記制御入力値とを前記作業機械のモデルに入力して、前記移動において前記作業機械が転倒しない制約条件を満足するように、前記第1位置から前記第2位置までの前記走行装置の目標走行条件及び前記作業機の目標作業条件を含む前記作業機械の目標動作条件を決定することと、を含む、
作業機械の動作条件決定方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
作業機械に係る技術分野において、特許文献1に開示されているような、車両が自動走行するための軌道を探索するシステムが知られている。特許文献1において、システムは、障害物の位置を表す第1制約条件に基づいて、車両の初期位置から目標位置へ移動するための経路である車両の位置及び姿勢を要素とする系列を探索し、経路からの逸脱距離に応じてペナルティ値が増加する第2制約条件を生成し、第2制約条件に基づいて、車両の初期位置から目標位置へ移動するための軌道である車両の位置、姿勢、速度及び舵角を要素とする系列を探索する。
【先行技術文献】
【特許文献】
【0003】
特開2022-157259号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
初期位置から目標位置までの作業機械の移動において、作業機械の動作条件によっては、作業機械の重量バランスが崩れて作業機械が転倒する可能性がある。
【0005】
本開示は、作業機械の転倒を抑制することを目的とする。
【課題を解決するための手段】
【0006】
本開示に従えば、コンピュータを備える作業機械の動作条件決定システムが提供される。コンピュータは、作業機械の第1位置を含む第1状態を取得する第1状態取得部と、作業機械の第2位置を含む第2状態を取得する第2状態取得部と、第1位置から第2位置までの作業機械の移動において作業機械が有する走行装置を制御する走行入力値及び作業機械が有する作業機を制御する作業入力値を含む制御入力値を生成する制御入力値生成部と、第1状態と第2状態と制御入力値とを作業機械のモデルに入力して、移動において作業機械が転倒しない制約条件を満足するように、第1位置から第2位置までの走行装置の目標走行条件及び作業機の目標作業条件を含む作業機械の目標動作条件を決定する動作条件決定部と、を有する。
【発明の効果】
【0007】
本開示によれば、作業機械の転倒が抑制される。
【図面の簡単な説明】
【0008】
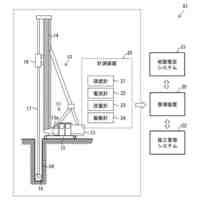
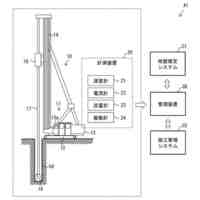
図1は、実施形態に係る作業機械の動作条件決定システムを模式的に示す図である。
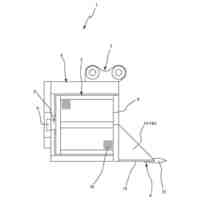
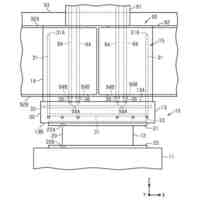
図2は、実施形態に係る作業機械を示す構成図である。
図3は、実施形態に係るサーバのハードウエア構成図である。
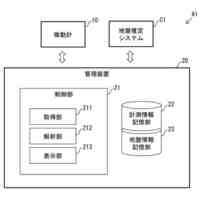
図4は、実施形態に係る作業機械の動作条件決定システムを示す機能ブロック図である。
図5は、実施形態に係る作業機械の動作を説明する図である。
図6は、実施形態に係るサーバにおける処理を説明する図である。
図7は、実施形態に係る制約条件を説明する図である。
図8は、実施形態に係る目標動作条件の決定方法を説明するブロック図である。
図9は、実施形態に係る目標動作条件の決定方法を説明する模式図である。
図10は、実施形態に係る目標動作条件の決定方法を示すフローチャートである。
【発明を実施するための形態】
【0009】
以下、本開示に係る実施形態について図面を参照しながら説明するが、本開示は実施形態に限定されない。以下で説明する実施形態の構成要素は、適宜組み合わせることができる。また、一部の構成要素を用いない場合もある。
【0010】
[動作条件決定システム]
図1は、実施形態に係る作業機械1の動作条件決定システム100を模式的に示す図である。作業機械1は、作業現場において稼働する。実施形態において、作業機械1は、ホイールローダである。動作条件決定システム100は、サーバ101を備える。サーバ101は、作業機械1の外部に配置される。サーバ101は、コンピュータシステムを含む。サーバ101は、通信システム102を介して、作業機械1と通信することができる。通信システム102は、インターネット通信網を含む。なお、通信システム102は、携帯電話通信網を含んでもよいし、衛星通信網を含んでもよいし、ローカルエリアネットワーク(LAN:Local Area Network)を含んでもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
バケット
22日前
個人
建物の不同沈下の修正方法
29日前
鹿島建設株式会社
接続方法
2日前
株式会社富田製作所
継手部構造
22日前
株式会社大林組
操縦装置
25日前
株式会社郷土開発
傾斜地の切土工法
1日前
株式会社クボタ
作業機
1日前
日立建機株式会社
建設機械
15日前
日立建機株式会社
作業機械
14日前
FKS株式会社
擁壁及び擁壁の築造方法
24日前
株式会社三誠
建物の免震構造
29日前
日本車輌製造株式会社
杭打機の表示システム
17日前
ナブテスコ株式会社
ドーザブレード駆動機構
14日前
日本車輌製造株式会社
杭打機の制御システム
28日前
株式会社大林組
施工支援装置及び施工支援方法
24日前
日本車輌製造株式会社
建設機械の電源システム
28日前
株式会社大林組
施工支援装置及び施工支援方法
24日前
株式会社大林組
評価支援装置及び評価支援方法
23日前
株式会社大林組
施工支援装置及び施工支援方法
24日前
株式会社大林組
免震構造及び免震構造の施工方法
17日前
個人
保護カバー及び保護カバーの取付方法
17日前
ヤンマーホールディングス株式会社
作業機械
1日前
大成建設株式会社
推定方法
29日前
ヤンマーホールディングス株式会社
作業機械
1日前
個人
真空バケット浚渫工法と真空バケット及び真空バケット浚渫船
28日前
個人
斜面保護構造、及び、斜面保護構造施工方法
14日前
株式会社中山ホールディングス
作業補助装置及び作業システム
24日前
住友重機械工業株式会社
作業機械用の遠隔操作システム
14日前
鹿島建設株式会社
生態系環境改善部材及び生態系環境改善構造
14日前
株式会社エスイー
法面安定化擁壁における擁壁パネルの支持構造
22日前
個人
道路上のマンホール蓋と周辺路面の段差を無くすマンホ-ル蓋受枠。
28日前
株式会社丸正商会
水捌け判定方法及び疎水材充填装置
23日前
大成建設株式会社
地盤計測システム
14日前
住友重機械工業株式会社
ショベル、ショベルの操作システム
9日前
清水建設株式会社
地中連続壁の終局せん断耐力算定方法
14日前
ヤンマーホールディングス株式会社
作業機械
14日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ