TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025162370
公報種別
公開特許公報(A)
公開日
2025-10-27
出願番号
2024065635
出願日
2024-04-15
発明の名称
操縦装置
出願人
株式会社大林組
代理人
個人
,
個人
主分類
E02F
9/16 20060101AFI20251020BHJP(水工;基礎;土砂の移送)
要約
【課題】建設機械への取り付け自由度を高めるための操縦装置を提供する。
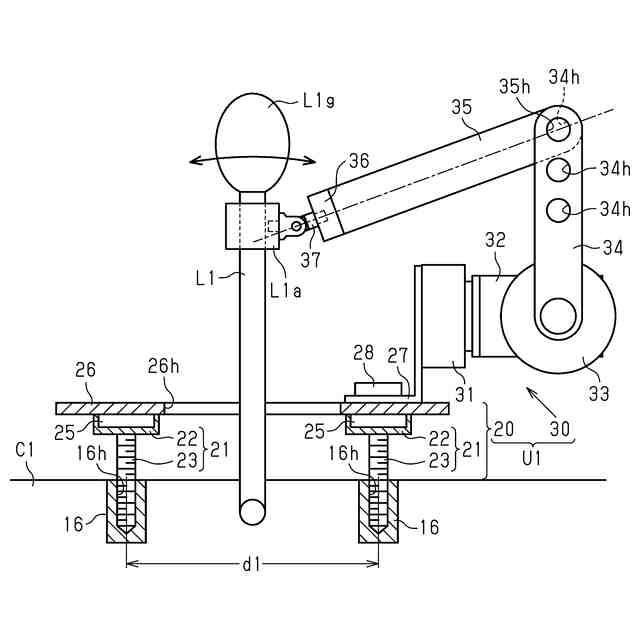
【解決手段】建設機械を操作する操縦装置は、取付部材21と、取付板26と、駆動機構部30とを備える。取付部材21は、建設機械において操作レバーL1の周囲に固定される固定部材16に係合可能な部材である。取付板26は、取付部材21の上方に配置され、駆動機構部30は、取付板26に支持される。また、取付部材21は、取付板26に対して複数の位置に取付可能に構成される。駆動機構部30は、操作レバーL1に取り付けられた第1アーム34及び第2アーム35により、制御信号に応じて、操作レバーL1を前後左右に動かす。
【選択図】図5
特許請求の範囲
【請求項1】
建設機械を操作する操縦装置であって、
前記建設機械において、前記建設機械の操作レバーの周囲に固定される固定部材に係合可能な取付部材と、
前記取付部材の上方に配置される取付ブロックと、
前記取付ブロックに支持される駆動機構部と、を備え、
前記取付部材は、前記取付ブロックに対して複数の位置に取付可能に構成され、
前記駆動機構部は、前記操作レバーに取り付けられたアームにより、制御信号に応じて、前記操作レバーを前後左右に動かすことを特徴とする操縦装置。
続きを表示(約 350 文字)
【請求項2】
前記取付部材は、
前記固定部材に形成されたねじ孔に螺合するボルト部と、
前記ボルト部の上方において前記取付ブロックに対して複数の位置に着脱可能な磁石とを備え、
前記取付ブロックは、前記磁石に吸着する磁性体で構成されていることを特徴とする請求項1に記載の操縦装置。
【請求項3】
前記駆動機構部を駆動制御する制御部を更に備え、
前記制御部は、前記操作レバーのニュートラル状態における前記駆動機構部の取付位置における取付基準線から、前記操作レバーの前後方向及び左右方向の少なくとも1つである動作方向基準線までの角度を用いて、前記制御信号の指示に応じた方向に前記駆動機構部を稼働させることを特徴とする請求項1又は2に記載の操縦装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、建設機械を遠隔や自動によって操作する操縦装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
作業者が操作する建設機械に装着する遠隔操縦装置が検討されている(例えば、特許文献1参照。)。この文献に記載された建設機械の遠隔操縦装置は、動作支点を中心として傾動可能な建設機械の操作杆の周囲に取り付けられ、送信機からの操作信号によって操作杆を動作させる操作装置を備える。この操作装置は、動作支点の近傍位置を回転軸として揺動するリンクと、リンクに接続しその長さ方向に操作杆を案内する棒状のガイド部材とを備えた2組の駆動ユニットを有する。更に、この2組の駆動ユニットは、双方のガイド部材の交差位置で操作杆と接続される。そして、ガイド部材は円弧状に構成されるとともに、一方のガイド部材が他方のガイド部材に沿って移動する。
【先行技術文献】
【特許文献】
【0003】
特開2017-172174号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
遠隔や自動によって操作する操縦装置においては、操作レバーを前後左右に動かす操作装置を、操作レバーの近傍に配置することがある。この場合、例えば、操作レバーのカバーを固定する筐体等の周囲部材で固定していた。
【0005】
しかしながら、周囲部材の位置や高さは、建設機械によって異なる。このため、操作装置を取り付ける際には、固定先の周囲部材の配置等に合わせて、取付部材を個別に作製する必要があった。
【課題を解決するための手段】
【0006】
上記課題を解決する操縦装置は、建設機械を操作する操縦装置であって、前記建設機械において、前記建設機械の操作レバーの周囲に固定される固定部材に係合可能な取付部材と、前記取付部材の上方に配置される取付ブロックと、前記取付ブロックに支持される駆動機構部と、を備え、前記取付部材は、前記取付ブロックに対して複数の位置に取付可能に構成され、前記駆動機構部は、前記操作レバーに取り付けられたアームにより、制御信号に応じて、前記操作レバーを前後左右に動かす。
【発明の効果】
【0007】
本開示によれば、建設機械への操縦装置の取り付け自由度を高めることができる。
【図面の簡単な説明】
【0008】
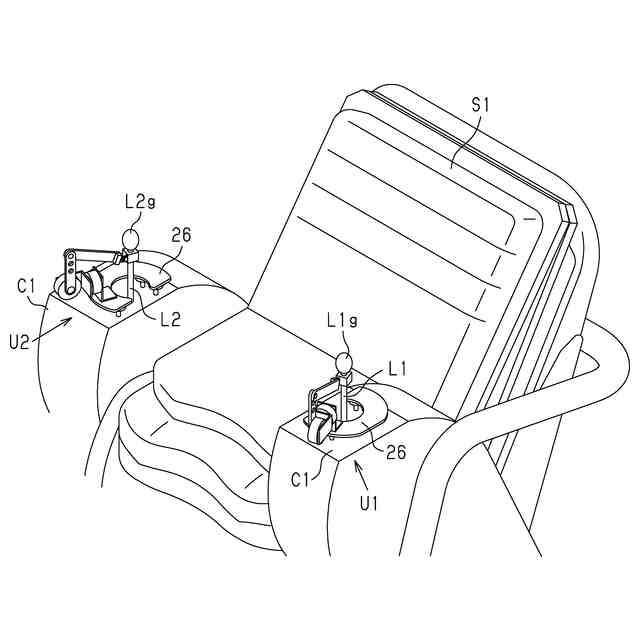
実施形態における操作装置を、油圧ショベルの運転席に取り付けた状態を説明する要部の斜視図である。
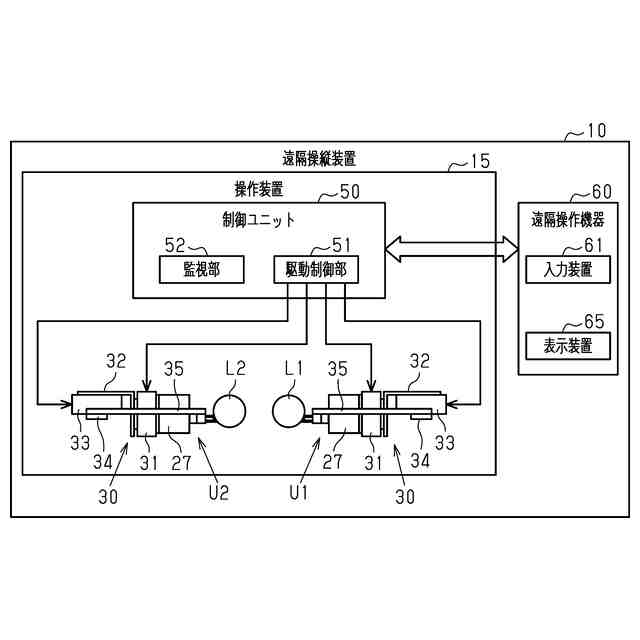
実施形態における操縦装置のシステムの概念図である。
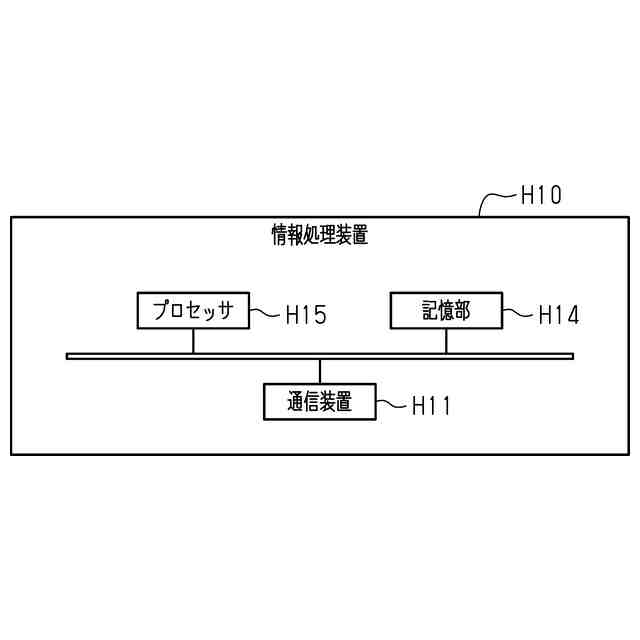
実施形態におけるハードウェア構成の説明図である。
実施形態における操作装置の平面図である。
実施形態における操作装置の正面図である。
【発明を実施するための形態】
【0009】
以下、図1~図5を用いて、操縦装置を具体化した一実施形態を説明する。本実施形態の操縦装置は、油圧ショベル等の建設機械を遠隔地から操作する遠隔操縦装置として説明する。この遠隔操縦装置は、操作レバーに力を加えて操作レバーを動かす操作装置と、操作装置を操作するために制御信号を送信する遠隔操作機器とを備える。本実施形態では、操作装置は、複数の操作レバーにそれぞれ取り付けられる操作ユニットを備える。
【0010】
図1は、建設機械としての油圧ショベルの運転席内の要部を示している。本実施形態では、油圧ショベルの運転席内には、座席S1の両脇に、油圧ショベルを操作する1対の操作レバーL1,L2が配置される。手動の場合には、運転席に座った運転者が、操作レバーL1,L2の頭頂部にそれぞれ設けられた把持部L1g,L2gを把持して、操作レバーL1,L2を前後左右に傾動させることにより、油圧ショベルの操作を行なう。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ