TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025167567
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024072326
出願日
2024-04-26
発明の名称
作業機械用の遠隔操作システム
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20251030BHJP(水工;基礎;土砂の移送)
要約
【課題】送信するデータ量を削減する。
【解決手段】実施形態の一態様に係る作業機械用の遠隔操作システムは、下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、アタッチメントを含む作業機械の姿勢を検出する検出部と、前記上部旋回体に設けられ、前記作業機械の少なくとも前方を撮像する撮像装置と、前記検出部により検出された前記姿勢に関する情報、及び、前記撮像装置によって撮像された画像を送信する送信装置と、を有する作業機械と、前記姿勢に関する情報、及び、前記画像を受信する受信装置と、受信した前記画像を表示し、前記姿勢に関する情報に従って前記アタッチメントの姿勢の変化を表示する表示装置と、を備える。
【選択図】図4
特許請求の範囲
【請求項1】
下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、アタッチメントを含む作業機械の姿勢を検出する検出部と、前記上部旋回体に設けられ、前記作業機械の少なくとも前方を撮像する撮像装置と、前記検出部により検出された前記姿勢に関する情報、及び、前記撮像装置によって撮像された画像を送信する送信装置と、を有する作業機械と、
前記姿勢に関する情報、及び、前記画像を受信する受信装置と、
前記画像を表示し、前記姿勢に関する情報に従って前記アタッチメントの姿勢の変化を表示する表示装置と、
を備える作業機械用の遠隔操作システム。
続きを表示(約 830 文字)
【請求項2】
前記送信装置が送信する前記画像には、前記作業機械の前記上部旋回体の運転席から、前記アタッチメントが存在する側方向を撮像範囲に含まない、
請求項1に記載の作業機械用の遠隔操作システム。
【請求項3】
前記表示装置は、前記作業機械の前方を表している前記画像を基準として、前記作業機械の運転室から前記アタッチメントが位置する方向に、前記アタッチメントの姿勢の変化を表示する、
請求項1に記載の作業機械用の遠隔操作システム。
【請求項4】
前記表示装置によって姿勢の変化が表示される前記アタッチメントは、前記作業機械の運転席から参照した場合の形状として表される、
請求項3に記載の作業機械用の遠隔操作システム。
【請求項5】
前記表示装置は、前記画像に写っている物体と略同一の縮尺に従って、前記アタッチメントを表示する、
請求項3又は4に記載の作業機械用の遠隔操作システム。
【請求項6】
前記表示装置は、前記前方を表している前記画像以外の第2画像を表示すると共に、前記第2画像に、前記アタッチメントの輪郭を重畳して表示する、
請求項1に記載の作業機械用の遠隔操作システム。
【請求項7】
前記受信装置が受信する前記姿勢に関する情報には、前記上部旋回体の姿勢に関する情報を含み、
前記表示装置は、前記受信した前記上部旋回体の姿勢に関する情報に基づいて、前記上部旋回体を基準とした前記下部走行体の姿勢を認識可能に、前記下部走行体の少なくとも一部の形状を表示する、
請求項1に記載の作業機械用の遠隔操作システム。
【請求項8】
前記表示装置は、前記姿勢に関する情報に従って前記アタッチメントの姿勢の変化をアニメーションとして表示する、
請求項1に記載の作業機械用の遠隔操作システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械用の遠隔操作システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、作業機械を遠隔操作する技術が提案されている。遠隔操作では操作者が、映像を参照しながら操作を行う。操作者が作業機械で作業するためには、作業機械を含む周囲の状況を表示する必要がある。このために作業機に設けられた複数の撮像装置で撮像された画像を、遠隔操作装置に送信する技術が提案されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2018-207244号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載された遠隔操作システムは、複数の撮像装置で撮像された画像を送信するので、広めの通信帯域が必要となる。送信するデータ量が多い場合には通信帯域を圧迫する原因ともなるので、送信するデータ量の削減が求められる傾向にある。
【0005】
上述に鑑み、作業機械の姿勢の変化を表示可能としたうえで、送信するデータ量を削減する。
【課題を解決するための手段】
【0006】
本発明の一態様に係る作業機械用の遠隔操作システムは、下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、アタッチメントを含む作業機械の姿勢を検出する検出部と、前記上部旋回体に設けられ、前記作業機械の少なくとも前方を撮像する撮像装置と、前記検出部により検出された前記姿勢に関する情報、及び、前記撮像装置によって撮像された画像を送信する送信装置と、を有する作業機械と、前記姿勢に関する情報、及び、前記画像を受信する受信装置と、受信した前記画像を表示し、前記姿勢に関する情報に従って前記アタッチメントの姿勢の変化を表示する表示装置と、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、作業機械の姿勢の変化を表示可能としたうえで、送信するデータ量を削減する。
【図面の簡単な説明】
【0008】
第1の実施形態に係る遠隔操作システムの一例を示す概要図である。
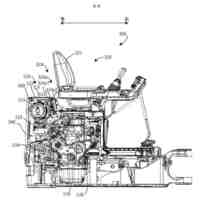
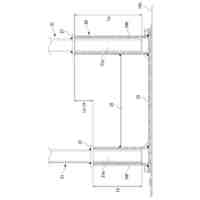
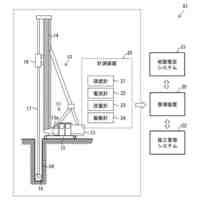
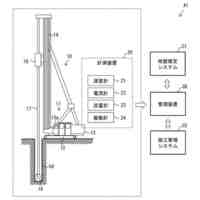
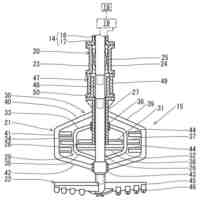
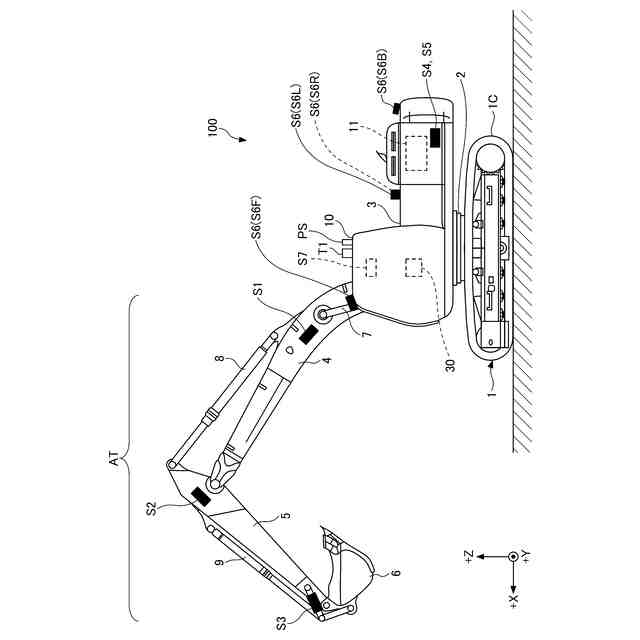
第1の実施形態に係るショベル(掘削機)を示す側面図である。
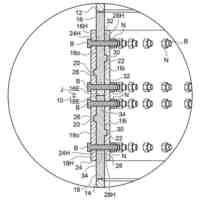
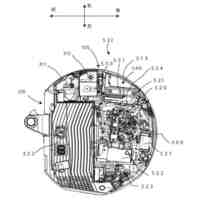
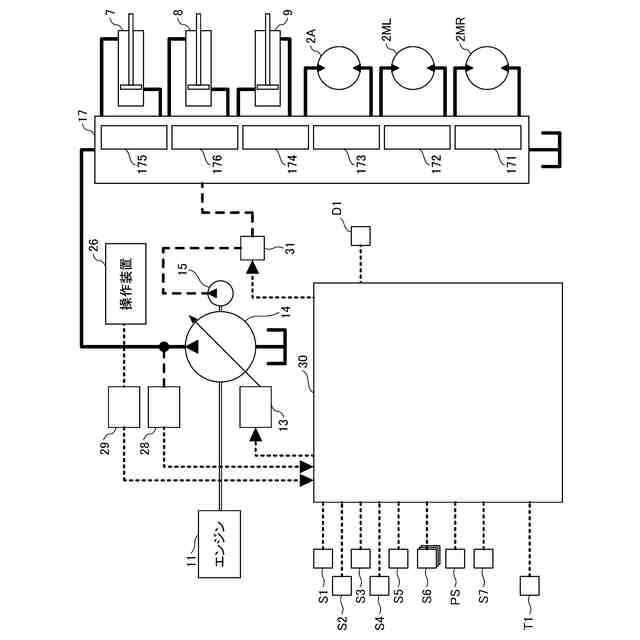
第1の実施形態に係るショベルの駆動制御系の構成例を示す図である。
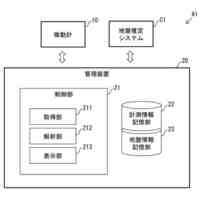
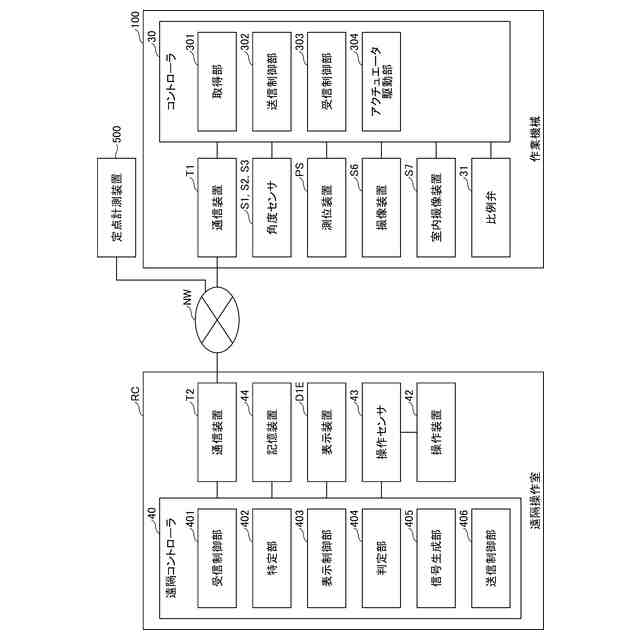
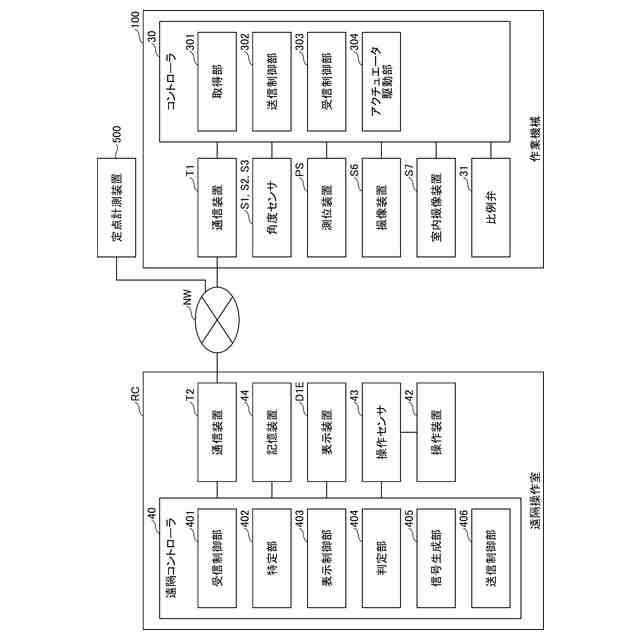
第1の実施形態に係る遠隔操作システムの構成例を示す機能ブロック図である。
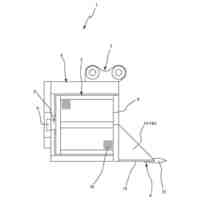
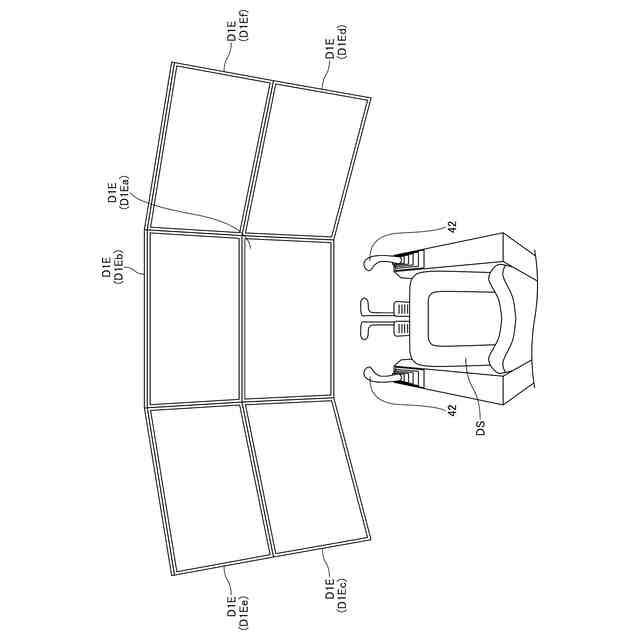
第1の実施形態に係る遠隔操作室の配置例を示す図である。
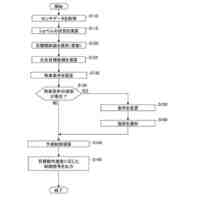
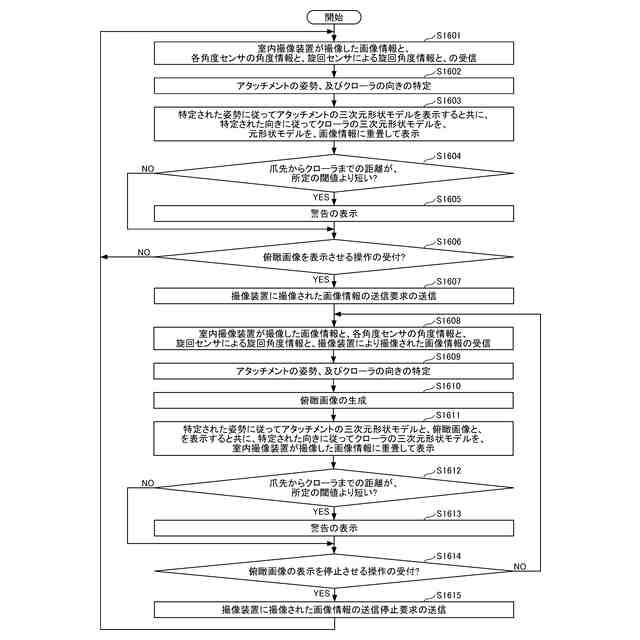
第1の実施形態に係る遠隔コントローラにおける、表示装置に表示するための処理手順を示したフローチャートである。
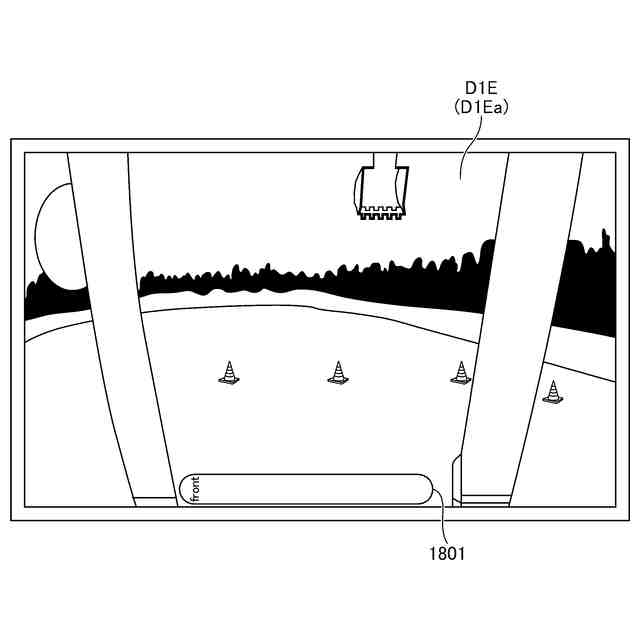
第1の実施形態に係る表示装置に表示される表示画面の一例を示した図である。
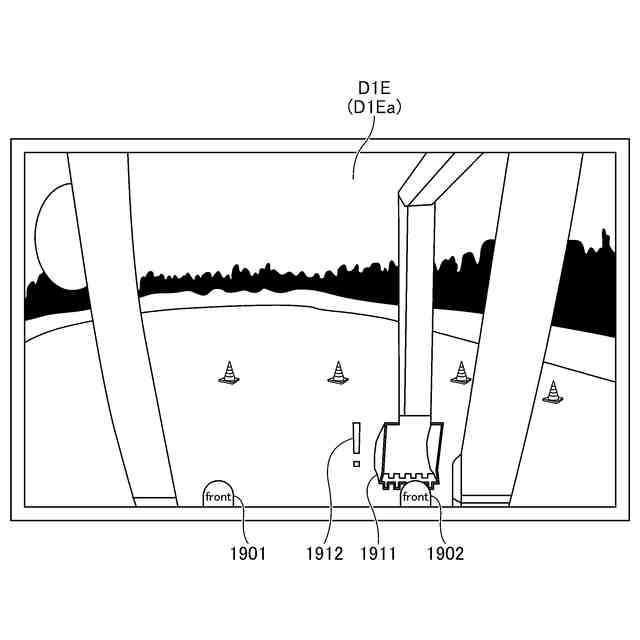
第1の実施形態に係る中央モニタに表示される表示画面の一例を示した図である。
第1の実施形態に係る中央モニタに表示される表示画面の一例を示した図である。
【発明を実施するための形態】
【0009】
以下、本開示の実施形態について図面を参照して説明する。以下で説明する実施形態は、例示であり、発明を限定するものではない。本開示の実施形態における全ての特徴及びその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、重複する説明を省略する場合がある。
【0010】
本開示の実施形態に係る作業機械100は、ショベルである。作業機械100は、クレーン、アスファルトフィニッシャ、又はフォークリフト等のショベル以外の機械であってもよい。また、図示例では、作業機械100としてのショベルは、エンドアタッチメントとしてバケット6を備えた掘削機であるが、バケット6以外のエンドアタッチメントを備えた林業機械等の応用機であってもよい。さらには、下部走行体と、上部旋回体と、上部旋回体に設けられたアタッチメントと、を備えたクローラークレーンであってもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
バケット
1か月前
個人
建物の不同沈下の修正方法
1か月前
鹿島建設株式会社
接続方法
17日前
株式会社富田製作所
継手部構造
1か月前
株式会社大林組
操縦装置
1か月前
千代田工営株式会社
回転貫入杭
1か月前
株式会社郷土開発
傾斜地の切土工法
16日前
ウエダ産業株式会社
アタッチメント
8日前
株式会社クボタ
作業機
16日前
日立建機株式会社
建設機械
3日前
ヤンマーホールディングス株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
29日前
日本車輌製造株式会社
建設機械
1日前
日立建機株式会社
建設機械
1か月前
エポコラム機工株式会社
地盤改良装置
1日前
FKS株式会社
擁壁及び擁壁の築造方法
1か月前
株式会社三誠
建物の免震構造
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
1か月前
山形新興株式会社
建築物の基礎及び基礎成形型
1か月前
日本車輌製造株式会社
杭打機の表示システム
1か月前
ナブテスコ株式会社
ドーザブレード駆動機構
29日前
日本車輌製造株式会社
杭打機の制御システム
1か月前
個人
アンカーボルト支持装置
1か月前
株式会社大林組
評価支援装置及び評価支援方法
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
株式会社大林組
掘削支援装置及び掘削支援方法
10日前
日本車輌製造株式会社
建設機械の電源システム
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
株式会社大林組
免震構造及び免震構造の施工方法
1か月前
個人
保護カバー及び保護カバーの取付方法
1か月前
エポコラム機工株式会社
地盤改良装置及び地盤改良工法
1日前
エポコラム機工株式会社
地盤改良装置及び地盤改良工法
1日前
大成建設株式会社
推定方法
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ