TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025157901
公報種別
公開特許公報(A)
公開日
2025-10-16
出願番号
2024060250
出願日
2024-04-03
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
3/43 20060101AFI20251008BHJP(水工;基礎;土砂の移送)
要約
【課題】拘束条件の逸脱が発生した場合に作業機械の不安定な動作を防止する。
【解決手段】作業機械のコントローラは、作業装置が侵入防止領域に侵入することを防止するための拘束条件を設定し、拘束条件を満足しつつ作業具の座標と作業具の目標座標との偏差が小さくなるように、現時点から所定時間の間の油圧アクチュエータの目標動作速度を演算し、姿勢検出装置により検出された作業装置の姿勢に基づいて油圧アクチュエータの動作速度を演算し、油圧アクチュエータの動作速度が目標動作速度に一致するように油圧アクチュエータを制御し、作業装置の制御点の位置が拘束条件を逸脱しているか否かを判定し、作業装置の制御点の位置が拘束条件を逸脱していると判定された場合には、その判定結果を通知装置に出力する出力制御、及び作業装置の動作を禁止する動作禁止制御の少なくとも一方を実行する。
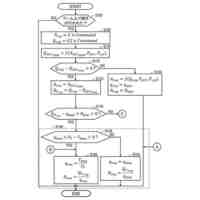
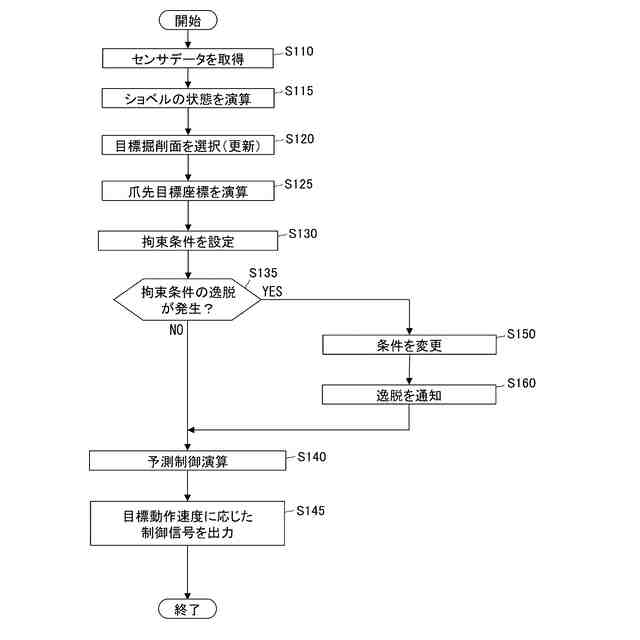
【選択図】図5
特許請求の範囲
【請求項1】
作業具を含む複数の被駆動部材と、前記複数の被駆動部材を駆動する複数の油圧アクチュエータと、を有する作業装置と、
前記作業装置が取り付けられた機体と、
前記作業装置の姿勢を検出する姿勢検出装置と、
前記機体の位置を検出する位置検出装置と、
前記作業装置の動作を制御するコントローラと、を備えた作業機械において、
前記コントローラは、
前記姿勢検出装置により検出された前記作業装置の姿勢と、前記位置検出装置により検出された前記機体の位置と、に基づいて、現時点の前記作業具の座標を演算し、
前記作業具の座標と、前記作業機械の動作が許容される動作限定領域と前記作業機械の侵入が防止される侵入防止領域との境界面と、に基づいて、前記作業装置が前記侵入防止領域に侵入することを防止するための拘束条件を設定し、
前記拘束条件を満足しつつ前記作業具の座標と前記作業具の目標座標との偏差が小さくなるように、現時点から所定時間の間の前記油圧アクチュエータの目標動作速度を演算し、
前記姿勢検出装置により検出された前記作業装置の姿勢に基づいて、前記油圧アクチュエータの動作速度を演算し、
前記油圧アクチュエータの動作速度が前記目標動作速度に一致するように、前記油圧アクチュエータを制御し、
前記作業装置の制御点の位置が前記拘束条件を逸脱しているか否かを判定し、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、その判定結果を通知装置に出力する出力制御、及び前記作業装置の動作を禁止する動作禁止制御の少なくとも一方を実行する、
ことを特徴とする作業機械。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の作業機械において、
前記コントローラは、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、前記動作禁止制御を実行し、
前記動作禁止制御において、前記油圧アクチュエータの目標動作速度を0にする、
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記コントローラは、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、前記動作禁止制御を実行し、
前記動作禁止制御において、前記作業具の目標座標に前記現時点の前記作業具の座標を設定するとともに、前記拘束条件を無効にする、
ことを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
オペレータにより操作される入力装置と、
オペレータに情報を通知する前記通知装置と、を備え、
前記コントローラは、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、前記出力制御を実行し、
前記出力制御において、前記作業装置の制御点の位置が前記拘束条件を逸脱していることを示す情報と、前記作業装置を動作させる意思を確認する情報と、を前記通知装置によってオペレータに通知し、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合であって、前記作業装置を動作させる意思がオペレータにあることを表す操作信号が入力されたときには、前記拘束条件を無効にするとともに前記作業装置の制御点が前記動作限定領域に近づくように前記作業具の目標座標を設定し、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合であって、前記作業装置を動作させる意思がオペレータにないことを表す操作信号が入力されたときには、前記動作禁止制御を実行する、
ことを特徴とする作業機械。
【請求項5】
請求項1に記載の作業機械において、
オペレータにより操作される入力装置と、
オペレータに情報を通知する前記通知装置と、を備え、
前記コントローラは、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、前記出力制御及び前記動作禁止制御を実行し、
前記出力制御において、前記作業装置の制御点の位置が前記拘束条件を逸脱していることを示す情報と、前記作業装置を動作させる意思を確認する情報と、を前記通知装置によってオペレータに通知し、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合であって、前記作業装置を動作させる意思がオペレータにあることを表す操作信号が入力されたときには、前記動作禁止制御を解除し、前記拘束条件を無効にするとともに前記作業装置の制御点が前記動作限定領域に近づくように前記作業具の目標座標を設定する、
ことを特徴とする作業機械。
【請求項6】
請求項1に記載の作業機械において、
前記位置検出装置は、GNSS衛星から信号を受信して前記機体の位置を検出し、
前記コントローラは、
前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、前記動作禁止制御を実行し、
前記位置検出装置からの信号に基づいて、前記位置検出装置の検出精度が良好であるか否かを判定し、
前記位置検出装置の検出精度が良好でないと判定された場合には、前記動作禁止制御を継続し、
前記位置検出装置の検出精度が良好であると判定された場合には、前記動作禁止制御を解除する、
ことを特徴とする作業機械。
【請求項7】
請求項1に記載の作業機械において、
オペレータにより操作される入力装置と、
オペレータに情報を通知する前記通知装置と、を備え、
前記位置検出装置は、GNSS衛星から信号を受信して前記機体の位置を検出し、
前記コントローラは、
前記位置検出装置からの信号に基づいて、前記位置検出装置の検出精度が良好であるか否かを判定し、
前記位置検出装置の検出精度が良好でないと判定された場合には、前記作業装置の制御点の位置が前記拘束条件を逸脱しているか否かにかかわらず、前記動作禁止制御及び通知制御を実行し、
前記通知制御において、前記位置検出装置の検出精度が良好でないことを示す情報と、前記作業装置を動作させる意思を確認する情報と、を前記通知装置によってオペレータに通知し、
前記位置検出装置の検出精度が良好でないと判定された場合であって、前記作業装置を動作させる意思がオペレータにあることを表す操作信号が入力されたときには、前記動作禁止制御を解除し、前記拘束条件を無効にする、
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、多関節型の作業装置を備えた作業機械に関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
情報化施工への対応に伴い、バケット(作業具)を含む多関節型の作業装置の位置及び姿勢をオペレータへ表示するマシンガイダンスや、作業装置の位置を目標掘削面に沿って動くように制御するマシンコントロール(運転支援制御)の機能を有する油圧ショベル(作業機械)が開発されている。
【0003】
特許文献1には、モデル予測制御(MPC:Model Predictive Control)を活用して油圧ショベルのバケットが目標掘削面に沿って動作するように作業装置を制御する制御システムが開示されている。モデル予測制御は、所定時間先までの評価関数の値を最小化するように制御入力を算出する制御手法である。モデル予測制御は、複数の関節を持つ作業機械の制御に好適な制御手法である。モデル予測制御を利用すれば、ブームやアームのシリンダ駆動量を個別に設計する必要がなく、状況に応じて、適切なシリンダ駆動量を自動的に算出することができる。また、モデル予測制御の利点として、拘束条件を陽に扱えること、すなわち少ない計算量でスピーディーに計算できることが広く知られている。特許文献1には、目標掘削面(設計面)とバケットの位置に関する拘束条件を考慮することで、バケットが目標掘削面を掘り過ぎてしまうような動作を回避する方法が示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-125594号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
油圧ショベルのマシンコントロールにおいては、GNSS(Global Navigation Satellite System)を利用して、3次元空間における、油圧ショベルの位置(自車位置)が算出され、目標掘削面と自車位置の関係に基づいてバケットの爪先の座標が算出される。しかしながら、GNSSを利用していると、測位に利用できる衛星数の変化や、補正情報の途絶によって、自車位置の演算結果が大きく変動し得る。例えば、実際のバケットの爪先が目標掘削面に位置しているにもかかわらず、爪先の座標の算出結果が目標掘削面の下に位置する状況が生じ得る。また、オペレータが目標掘削面を手動で設定する場合には、現在のバケットの爪先よりも高い位置に目標掘削面を設定することもできる。この場合、爪先の座標の算出結果は、目標掘削面の下に位置することになる。
【0006】
バケットの爪先の座標の算出結果が目標掘削面の下に位置している状況では、モデル予測制御において拘束条件の逸脱が発生していると考えられる。拘束条件の逸脱が発生した場合、拘束条件の逸脱から早期に回復させようとしてモデル予測制御が実行され、バケットが急動作する可能性がある。また、拘束条件を満足しない状態を初期状態として最適化演算を行う場合、最適化の繰り返し演算において想定外の挙動を生じ得る。つまり、拘束条件の逸脱が発生すると、作業機械の動作が不安定になるおそれがある。
【0007】
本発明は、拘束条件の逸脱が発生した場合において、作業機械の不安定な動作を防止することを目的とする。
【課題を解決するための手段】
【0008】
本発明の一態様による作業機械は、作業具を含む複数の被駆動部材と、前記複数の被駆動部材を駆動する複数の油圧アクチュエータと、を有する作業装置と、前記作業装置が取り付けられた機体と、前記作業装置の姿勢を検出する姿勢検出装置と、前記機体の位置を検出する位置検出装置と、前記作業装置の動作を制御するコントローラと、を備えている。前記コントローラは、前記姿勢検出装置により検出された前記作業装置の姿勢と、前記位置検出装置により検出された前記機体の位置と、に基づいて、現時点の前記作業具の座標を演算し、前記作業具の座標と、前記作業機械の動作が許容される動作限定領域と前記作業機械の侵入が防止される侵入防止領域との境界面と、に基づいて、前記作業装置が前記侵入防止領域に侵入することを防止するための拘束条件を設定し、前記拘束条件を満足しつつ前記作業具の座標と前記作業具の目標座標との偏差が小さくなるように、現時点から所定時間の間の前記油圧アクチュエータの目標動作速度を演算し、前記姿勢検出装置により検出された前記作業装置の姿勢に基づいて、前記油圧アクチュエータの動作速度を演算し、前記油圧アクチュエータの動作速度が前記目標動作速度に一致するように、前記油圧アクチュエータを制御し、前記作業装置の制御点の位置が前記拘束条件を逸脱しているか否かを判定し、前記作業装置の制御点の位置が前記拘束条件を逸脱していると判定された場合には、その判定結果を通知装置に出力する出力制御、及び前記作業装置の動作を禁止する動作禁止制御の少なくとも一方を実行する。
【発明の効果】
【0009】
本発明によれば、拘束条件の逸脱が発生した場合において、作業機械の不安定な動作を防止することができる。
【図面の簡単な説明】
【0010】
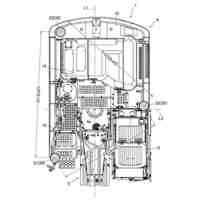
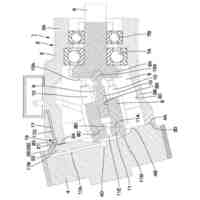
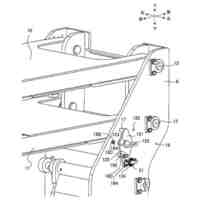
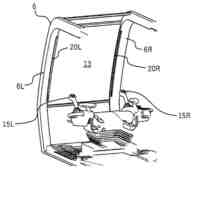
油圧ショベルの外観図である。
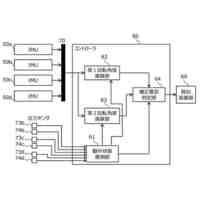
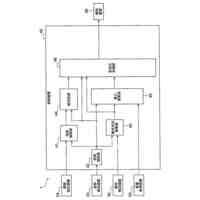
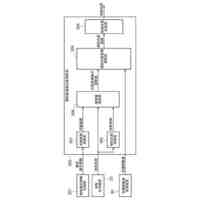
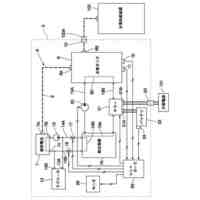
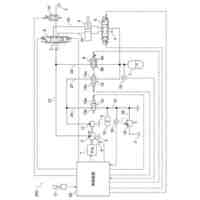
コントローラのハードウェア構成及び機能の概要を示すブロック図である。
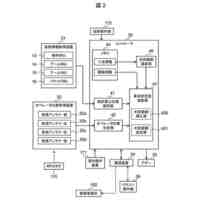
第1実施形態に係るコントローラの機能の詳細を示すブロック図である。
目標面の例を示す図であり、目標面が水平面である例を示す。
目標面の例を示す図であり、目標面が斜面である例を示す。
目標面の例を示す図であり、複数の目標面が設定されている例を示す。
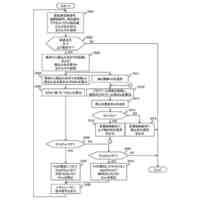
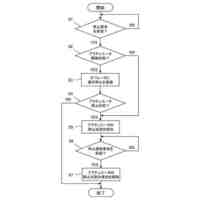
第1実施形態に係るコントローラの処理手順の一例を示すフローチャートである。
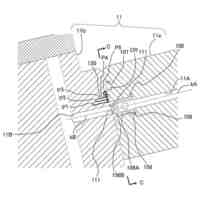
動作限定領域内で作業を行う油圧ショベルを示す図である。
作業装置の一部が侵入防止領域に侵入した状態を示す図である。
第2実施形態に係るコントローラの機能の詳細を示すブロック図である。
ユーザインタフェース(タッチパネルモニタ)の表示画面に表示される注意喚起画面の一例を示す図である。
バケットが実際の動作限定領域から逸脱している状況を示す図である。
バケットを実際の動作限定領域に近づけるために設定される代替拘束条件について説明する図である。
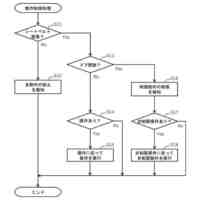
第2実施形態に係るコントローラの処理手順の一例を示すフローチャートである。
第2実施形態の変形例に係るコントローラの処理手順の一例を示すフローチャートである。
第3実施形態に係るコントローラの機能の詳細を示すブロック図である。
第4実施形態に係るコントローラの機能の詳細を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
転圧機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
26日前
日立建機株式会社
建設機械
3日前
日立建機株式会社
変速装置
1か月前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ