TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025148049
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048625
出願日
2024-03-25
発明の名称
作業車両
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/22 20060101AFI20250930BHJP(水工;基礎;土砂の移送)
要約
【課題】積込作業時において、オペレータの操作負担を軽減しながら、車速の制限と動作中の作業装置の停止位置とのバランスを適切に調整することが可能な作業車両を提供する。
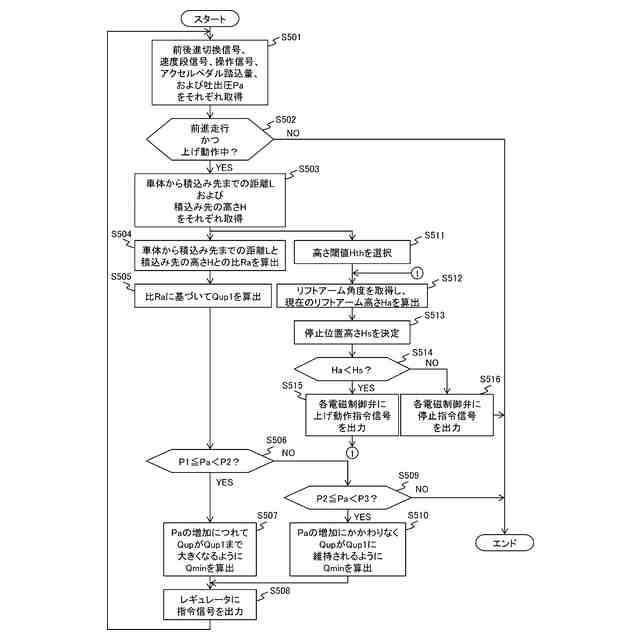
【解決手段】作業装置2を備えたホイールローダ1において、作業装置2の動作状態を検出する動作状態検出装置と、作業装置2内の荷が積み込まれる積込み先までの距離Lおよび積込み先の高さHを検出する積込み先センサ32と、を有し、コントローラ5は、車体の走行状態と、作業装置2の動作状態と、に基づいて、車体が前進走行し、かつ、作業装置2が上方向に動作しているか否かを判定し、車体が前進走行し、かつ、作業装置2が上方向に動作していると判定した場合に、車体から積込み先までの距離Lと、積込み先の高さHと、に基づいて、車速の制限量Qup1を算出し、算出した制限量Qup1に基づいて、走行駆動装置100Aを制御し、車速を制限する。
【選択図】図9
特許請求の範囲
【請求項1】
車体と、
前記車体に対し上下方向に回動可能に取り付けられた作業装置と、
前記車体を走行させる走行駆動装置と、
前記車体の走行状態を検出する走行状態検出装置と、
前記作業装置の動作および前記走行駆動装置を制御するコントローラと、
を備えた作業車両において、
前記作業装置の動作状態を検出する動作状態検出装置と、
前記作業装置内の荷が積み込まれる積込み先までの距離および前記積込み先の高さを検出する積込み先検出装置と、
を有し、
前記コントローラは、
前記走行状態検出装置で検出された前記車体の走行状態と、前記動作状態検出装置で検出された前記作業装置の動作状態と、に基づいて、前記車体が前進走行し、かつ、前記作業装置が上方向に動作しているか否かを判定し、
前記車体が前進走行し、かつ、前記作業装置が上方向に動作していると判定した場合に、前記積込み先検出装置で検出された前記車体から前記積込み先までの距離と前記積込み先の高さとに基づいて、車速の制限量を算出し、
算出した前記制限量に基づいて、前記走行駆動装置を制御し、車速を制限する
ことを特徴とする作業車両。
続きを表示(約 550 文字)
【請求項2】
請求項1に記載の作業車両において、
前記コントローラは、
前記積込み先検出装置で検出された前記車体から前記積込み先までの距離と前記積込み先の高さとの比を算出し、
算出した前記比に基づいて、前記制限量を算出する
ことを特徴とする作業車両。
【請求項3】
請求項1に記載の作業車両において、
前記作業装置を駆動させる作業用駆動装置と、
前記作業装置の姿勢を検出する姿勢検出装置と、
を有し、
前記コントローラには、
前記作業装置における複数の停止位置のそれぞれに対応した前記積込み先の高さとして設定された複数の高さ閾値が記憶され、
前記コントローラは、
前記複数の高さ閾値の中から、前記積込み先検出装置で検出された前記積込み先の高さに最も近い高さ閾値を選択し、
選択した高さ閾値と、前記姿勢検出装置で検出された前記作業装置の姿勢と、に基づいて、上方向に動作中の前記作業装置の停止位置を決定し、
前記作業装置の高さが、決定した前記作業装置の停止位置の高さに到達するまで、上方向への動作指令信号を前記作業用駆動装置に対して出力する
ことを特徴とする作業車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業装置を備えた作業車両に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
ホイールローダなどの作業車両は、前進走行しながら作業装置を上方向に動作させて、作業装置内の荷をダンプトラックやホッパーなどの積込み先に積み込む積込作業を行う。この積込作業では、オペレータは走行操作と作業装置の操作とを同時に行う必要があり、その操作は複雑であるため熟練を要する。そこで、近年、積込作業時におけるオペレータの操作負担を軽減して、効率良く車体を積込み先へ接近させるための機能が搭載された作業車両が登場している。
【0003】
例えば、特許文献1には、走行状態および荷役用油圧ポンプの吐出圧に基づいて、前進走行中におけるリフトアームの上方向への動作を特定する特定条件を満たすか否かを判定し、特定条件を満たす場合には、荷役用油圧ポンプの吐出圧の増加または荷役用油圧ポンプの入力トルクの増加に応じて、走行用油圧ポンプの押し退け容積または走行用油圧モータの押し退け容積を制御して車速を制限するコントローラを備えたホイールローダが開示されている。このホイールローダでは、積込作業時にコントローラが車速を制限することにより、積込み先までの走行距離を調整し、オペレータの走行操作の負担を軽減している。
【先行技術文献】
【特許文献】
【0004】
特許第6683883号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のホイールローダは、リフトアームの上げ操作に関係するセンサ情報に基づき車速を制限することで、結果的に、積込み先までの距離を短くすることができるものであって、車速の制限値は予め任意に設定された所定の値であることから、車速の制限と上方向へ動作している作業装置の停止位置とのバランスを調整するものではない。車速の制限と動作中の作業装置の停止位置とのバランスが適切になるように調整するためには、その都度、オペレータが車速の制限値を設定変更する必要があり、オペレータの手間が増えてしまう。
【0006】
そこで、本発明の目的は、積込作業時において、オペレータの操作負担を軽減しながら、車速の制限と動作中の作業装置の停止位置とのバランスを適切に調整することが可能な作業車両を提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明は、車体と、前記車体に対し上下方向に回動可能に取り付けられた作業装置と、前記車体を走行させる走行駆動装置と、前記車体の走行状態を検出する走行状態検出装置と、前記作業装置の動作および前記走行駆動装置を制御するコントローラと、を備えた作業車両において、前記作業装置の動作状態を検出する動作状態検出装置と、前記作業装置内の荷が積み込まれる積込み先までの距離および前記積込み先の高さを検出する積込み先検出装置と、を有し、前記コントローラは、前記走行状態検出装置で検出された前記車体の走行状態と、前記動作状態検出装置で検出された前記作業装置の動作状態と、に基づいて、前記車体が前進走行し、かつ、前記作業装置が上方向に動作しているか否かを判定し、前記車体が前進走行し、かつ、前記作業装置が上方向に動作していると判定した場合に、前記積込み先検出装置で検出された前記車体から前記積込み先までの距離と前記積込み先の高さとに基づいて、車速の制限量を算出し、算出した前記制限量に基づいて、前記走行駆動装置を制御し、車速を制限することを特徴とする。
【発明の効果】
【0008】
本発明によれば、積込作業時において、オペレータの操作負担を軽減しながら、車速の制限と動作中の作業装置の停止位置とのバランスを適切に調整することができる。上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
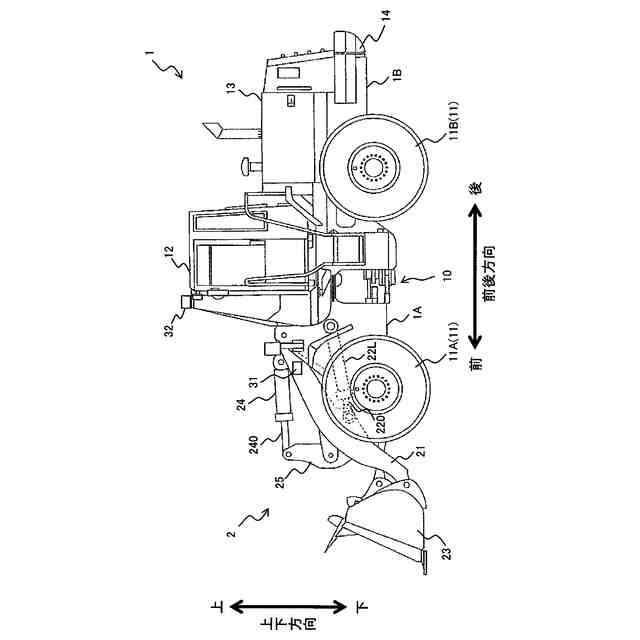
【0009】
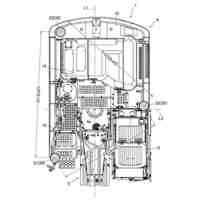
本発明の実施形態に係るホイールローダの一構成例を示す外観側面図である。
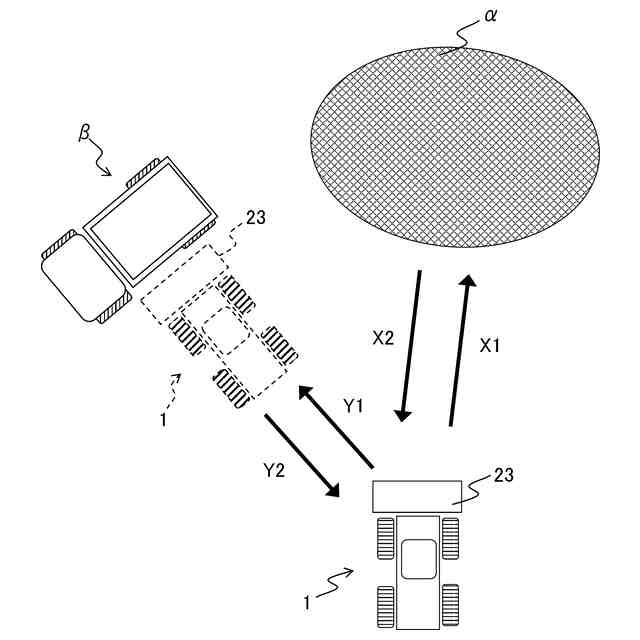
ホイールローダによるVシェープローディングについて説明する説明図である。
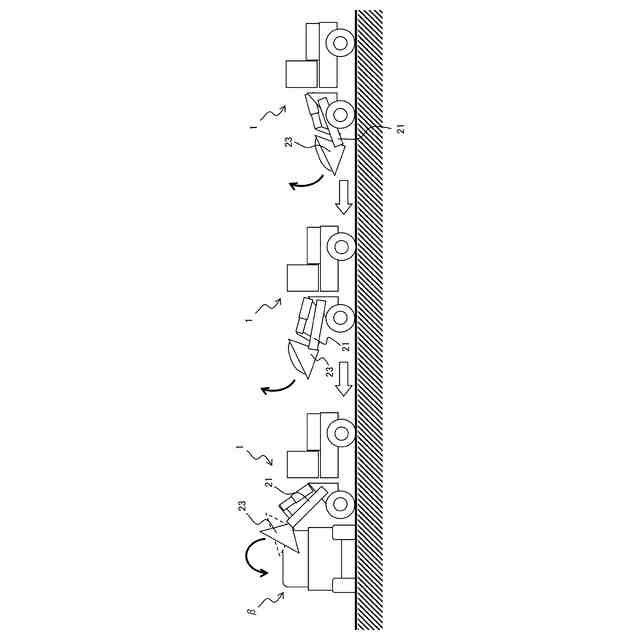
ホイールローダの積込作業について説明する説明図である。
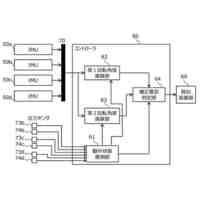
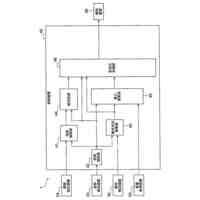
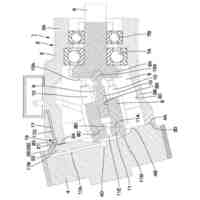
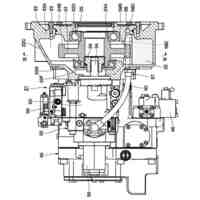
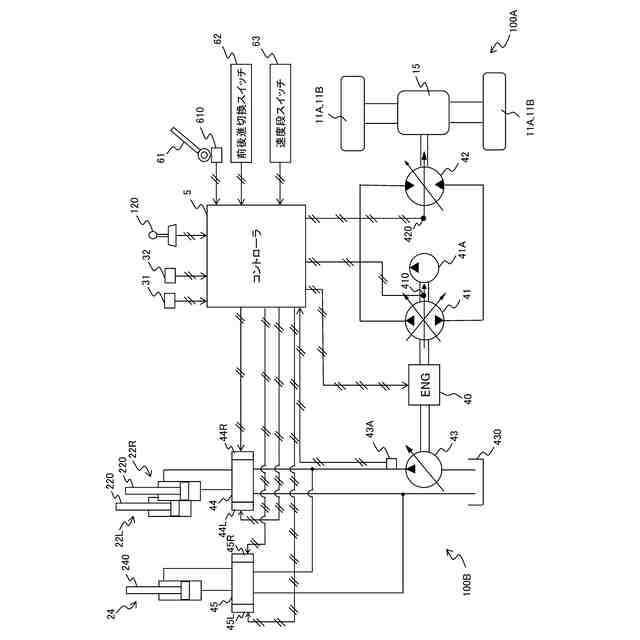
ホイールローダの駆動システムの一構成例を示すシステム構成図である。
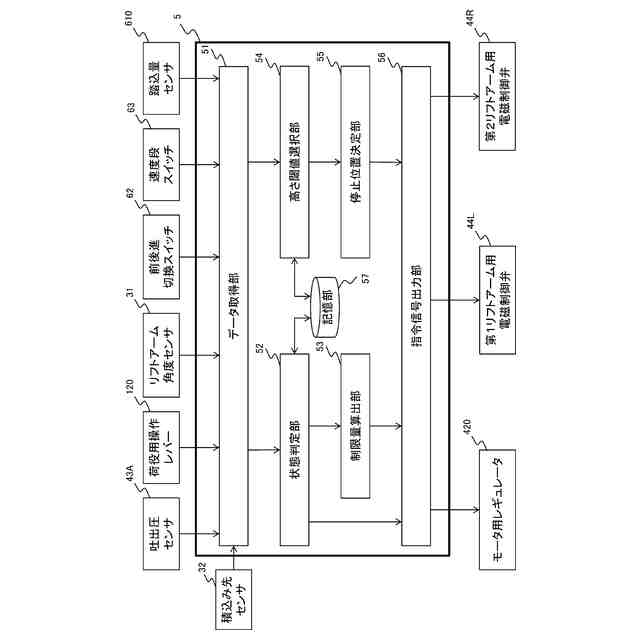
コントローラが有する機能を示す機能ブロック図である。
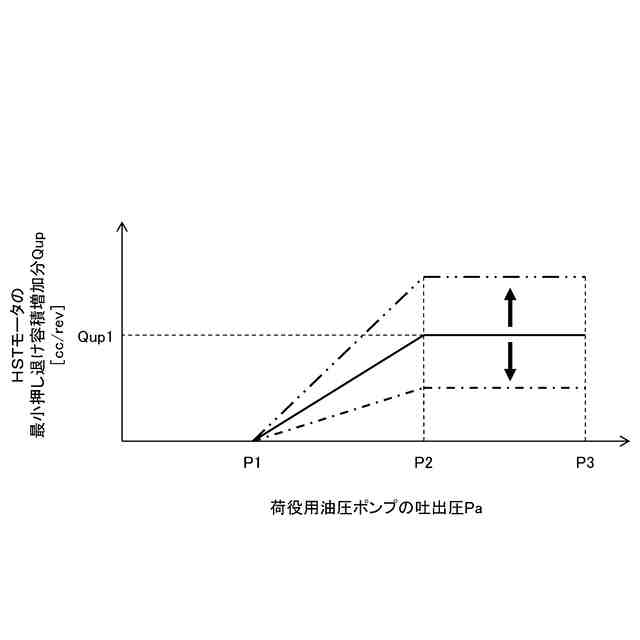
荷役用油圧ポンプの吐出圧とHSTモータの最小押し退け容積の増加分との関係を示すグラフである。
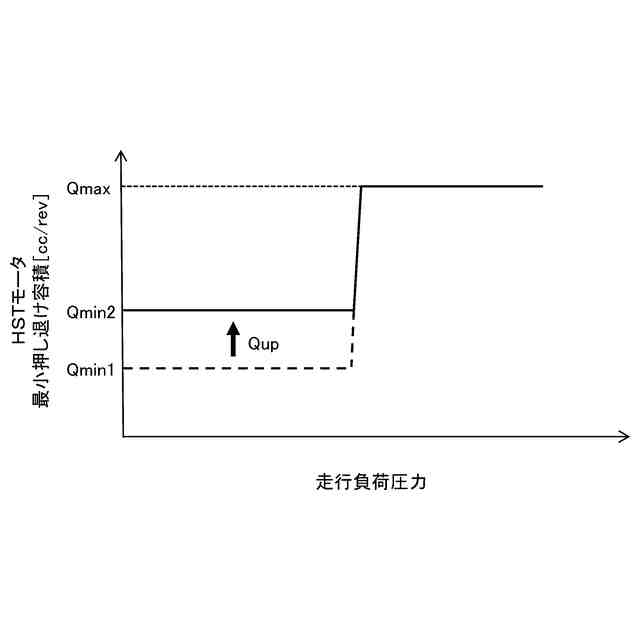
走行負荷圧力とHSTモータの最小押し退け容積との関係を示すグラフである。
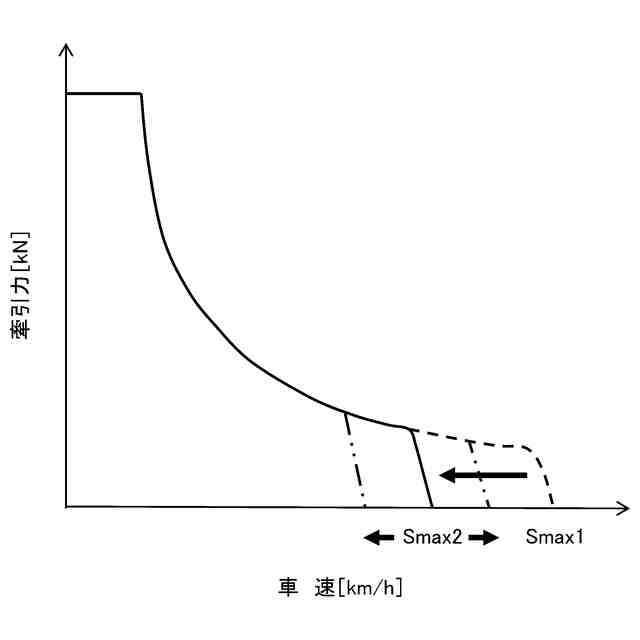
ホイールローダの車速と牽引力との関係を示すグラフである。
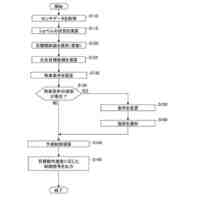
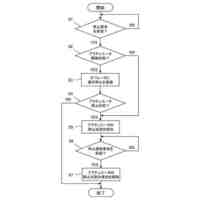
コントローラで実行される処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
以下では、本発明の実施形態に係る作業車両の一態様として、荷役作業を行うホイールローダを例に挙げて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
転圧機械
1か月前
日立建機株式会社
変速装置
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
油圧機器
1か月前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
ポンプ装置
1か月前
日立建機株式会社
映像記録装置
1か月前
日立建機株式会社
運用管理装置
1か月前
日立建機株式会社
施工管理装置
1か月前
日立建機株式会社
ダンプトラック
1か月前
日立建機株式会社
電動式作業機械
1か月前
日立建機株式会社
ホイールローダ
1か月前
日立建機株式会社
ダンプトラック
17日前
日立建機株式会社
ホイールローダ
1か月前
日立建機株式会社
遠隔制御システム
1か月前
日立建機株式会社
作業支援システム
1か月前
日立建機株式会社
コントロールバルブ
1か月前
日立建機株式会社
作業車両の梯子装置
1か月前
日立建機株式会社
車両用アクスル装置
1か月前
日立建機株式会社
建設発生土の管理システム
1か月前
日立建機株式会社
可変容量型斜板式液圧回転機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ