TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025154551
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024057613
出願日
2024-03-29
発明の名称
ホイールローダ
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/20 20060101AFI20251002BHJP(水工;基礎;土砂の移送)
要約
【課題】積込み作業のサイクルタイムを短縮して作業量を増やすことが可能なホイールローダを提供する。
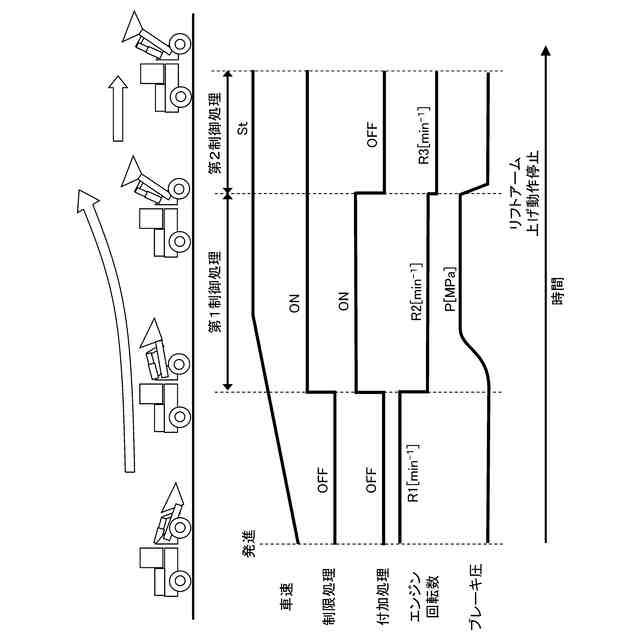
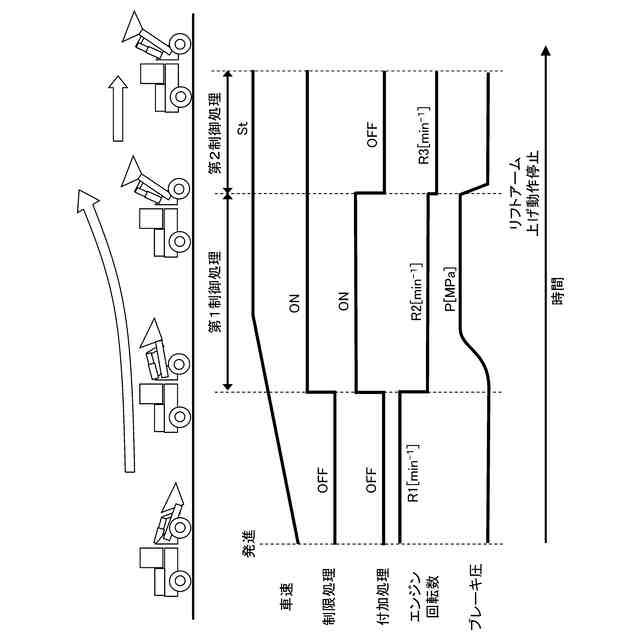
【解決手段】車体に対し上下方向に回動可能なリフトアーム21を有する作業装置2と、車体を走行させ、かつ、作業装置2を動作させるためのエンジン3と、車体に制動をかけるブレーキ装置8と、エンジン3およびブレーキ装置8をそれぞれ制御するコントローラ5と、を備えたホイールローダ1において、コントローラ5は、前進走行しながらリフトアーム21が上方向に動作する積込み動作中である場合に、エンジン3の回転速度を、最高回転速度R1よりも小さい値であって、かつ、ブレーキ装置8が非作動である場合に車速が目標車速Stとなる目標回転速度R3よりも大きい値R2にすると共に、実車速と目標車速Stとの差に基づいて設定されたブレーキ設定圧Pでブレーキ装置8を作動させて車速を制限する。
【選択図】図7
特許請求の範囲
【請求項1】
車体と、
前記車体に対し上下方向に回動可能なリフトアームを有する作業装置と、
前記車体を走行させ、かつ、前記作業装置を動作させるための動力源となる原動機と、
前記車体に制動をかけるブレーキ装置と、
前記車体の走行状態を検出する走行状態検出装置と、
前記リフトアームの動作状態を検出する動作検出装置と、
前記原動機および前記ブレーキ装置をそれぞれ制御するコントローラと、
を備えたホイールローダにおいて、
前記コントローラは、
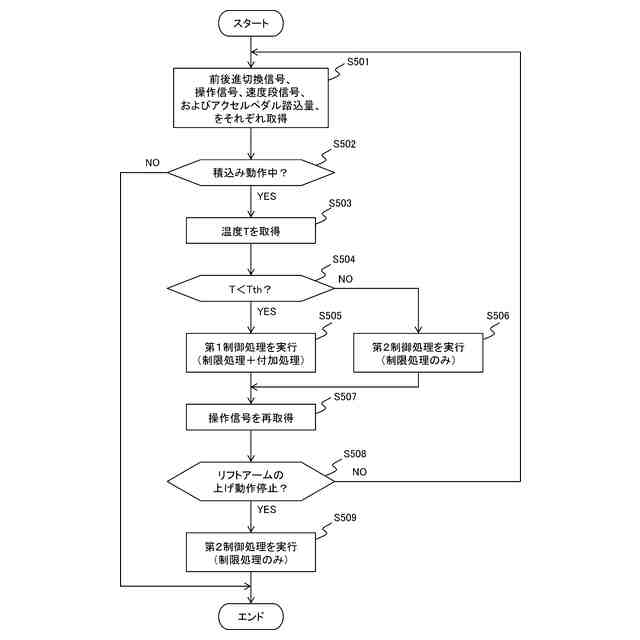
前記走行状態検出装置で検出された前記車体の走行状態および前記動作検出装置で検出された前記リフトアームの動作状態に基づいて、前記車体が前進走行しながら前記リフトアームが上方向に動作する積込み動作中である否かを判定し、
前記積込み動作中であると判定した場合に、前記原動機の回転速度を、最高回転速度よりも小さい値であって、かつ、前記ブレーキ装置が非作動である場合に車速が所定の目標車速となる目標回転速度よりも大きい値にすると共に、実車速と前記目標車速との差に基づいて設定されたブレーキ設定圧で前記ブレーキ装置を作動させる第1制御処理を実行して、車速を制限する
ことを特徴とするホイールローダ。
続きを表示(約 960 文字)
【請求項2】
請求項1に記載のホイールローダにおいて、
前記コントローラは、
前記積込み動作中であると判定した後に、前記リフトアームが上方向への動作を停止したと判定した場合には、前記原動機の回転速度を前記目標回転速度に制限すると共に、前記ブレーキ装置のブレーキ圧を前記ブレーキ設定圧よりも小さい圧力値に制限する第2制御処理を実行する
ことを特徴とするホイールローダ。
【請求項3】
請求項2に記載のホイールローダにおいて、
前記第2制御処理は、
前記原動機の回転速度を前記目標回転速度に制限すると共に、前記ブレーキ装置の作動を停止させる処理である
ことを特徴とするホイールローダ。
【請求項4】
請求項2に記載のホイールローダにおいて、
前記コントローラは、
前記第1制御処理では、
前記原動機の回転速度を前記目標回転速度にする制限処理と、前記目標回転速度に基づいて設定された所定の付加回転速度を前記目標回転速度に付加する付加処理と、を実行し、
前記第2制御処理では、
前記制限処理は継続して実行する一方で、前記付加処理の実行を停止する
ことを特徴とするホイールローダ。
【請求項5】
請求項1に記載のホイールローダにおいて、
前記コントローラは、
前記第1制御処理では、
前記原動機の回転速度を前記目標回転速度にする制限処理と、前記目標回転速度に基づいて設定された所定の付加回転速度を前記目標回転速度に付加する付加処理と、を実行する
ことを特徴とするホイールローダ。
【請求項6】
請求項5に記載のホイールローダにおいて、
前記ブレーキ装置の制動制御部の温度を検出する温度センサをさらに備え、
前記コントローラは、
前記温度センサで検出された温度が、オーバーヒート状態における前記ブレーキ装置の前記制動制御部の温度に基づいて設定された所定の温度閾値となった場合には、前記第1制御処理では、前記付加処理を実行せず、かつ、前記ブレーキ装置を作動させない
ことを特徴とするホイールローダ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、荷役作業を行うホイールローダに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
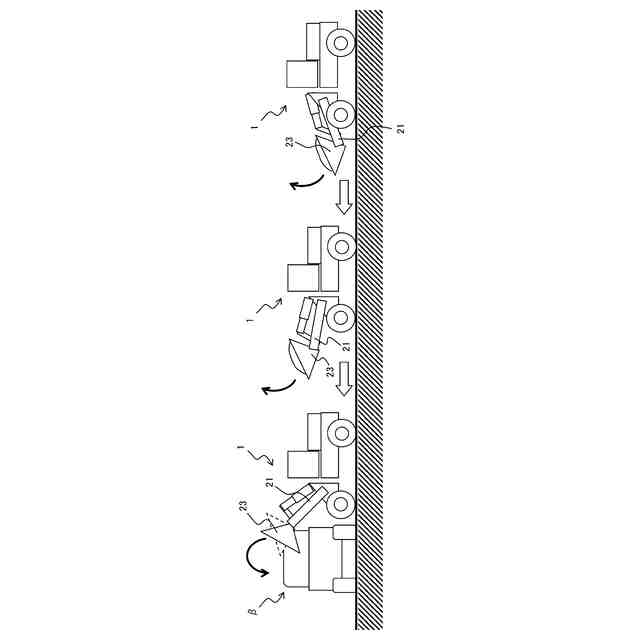
ホイールローダは、例えばダンプトラックなどの積込み先への荷の積込み作業の際には、積込み先に向かって前進走行しながらリフトアームを上方向に動作させる。この積込み作業では、リフトアームが上がりきるまでの時間と積込み先までの走行距離とのバランスが重要になる。走行距離に対してリフトアームが上がりきるまでの時間が長い場合、その分だけ積込み先までの走行距離を長く設定しておく必要が出てくる。走行距離が長くなると、ホイールローダの燃料の消費量が多くなってしまう。
【0003】
そこで、例えば、特許文献1に記載のホイールローダでは、積込み作業時において、エンジンの最高回転速度を小さくして車速を制限することにより、積込み先までの必要な走行距離を短くし、燃料の消費量を抑制している。
【先行技術文献】
【特許文献】
【0004】
特開2019-65574号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載のホイールローダの場合、エンジンの最高回転速度を小さくすることから、リフトアームの動力源である油圧ポンプから吐出される作動油の流量が減少し、リフトアームの動作速度が低下してしまう。そのため、ホイールローダが積込み先に到着するまでにリフトアームが上がりきらない場合があり、積込み作業のサイクルタイムが長くなって作業量が低下する可能性がある。
【0006】
そこで、本発明の目的は、積込み作業のサイクルタイムを短縮して作業量を増やすことが可能なホイールローダを提供することにある。
【課題を解決するための手段】
【0007】
上記の目的を達成するために、本発明は、車体と、前記車体に対し上下方向に回動可能なリフトアームを有する作業装置と、前記車体を走行させ、かつ、前記作業装置を動作させるための動力源となる原動機と、前記車体に制動をかけるブレーキ装置と、前記車体の走行状態を検出する走行状態検出装置と、前記リフトアームの動作状態を検出する動作検出装置と、前記原動機および前記ブレーキ装置をそれぞれ制御するコントローラと、を備えたホイールローダにおいて、前記コントローラは、前記走行状態検出装置で検出された前記車体の走行状態および前記動作検出装置で検出された前記リフトアームの動作状態に基づいて、前記車体が前進走行しながら前記リフトアームが上方向に動作する積込み動作中である否かを判定し、前記積込み動作中であると判定した場合に、前記原動機の回転速度を、最高回転速度よりも小さい値であって、かつ、前記ブレーキ装置が非作動である場合に車速が所定の目標車速となる目標回転速度よりも大きい値にすると共に、実車速と前記目標車速との差に基づいて設定されたブレーキ設定圧で前記ブレーキ装置を作動させる第1制御処理を実行して、車速を制限することを特徴とする。
【発明の効果】
【0008】
本発明によれば、積込み作業のサイクルタイムを短縮して作業量を増やすことができる。上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0009】
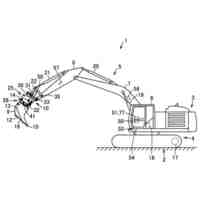
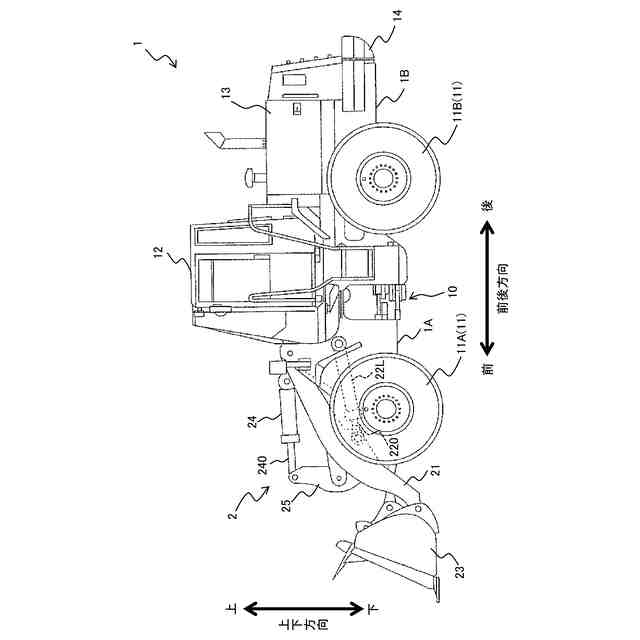
本発明の実施形態に係るホイールローダの一構成例を示す外観側面図である。
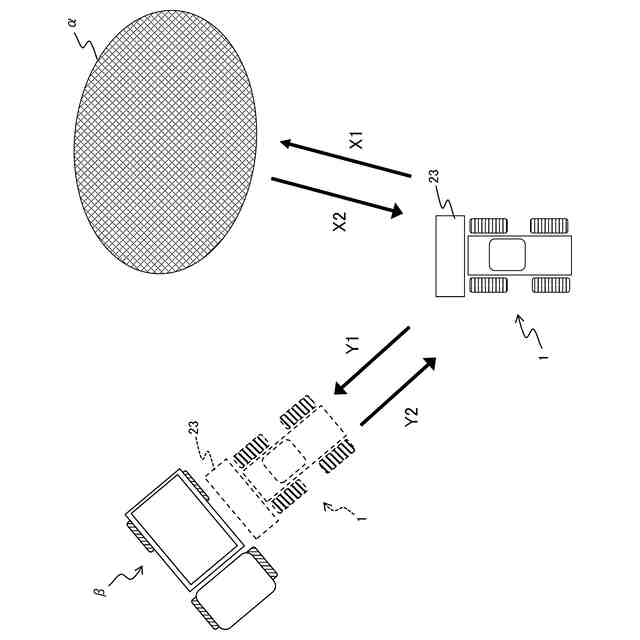
ホイールローダによるVシェープローディングについて説明する説明図である。
ホイールローダの積込み作業について説明する説明図である。
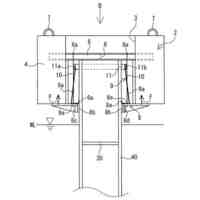
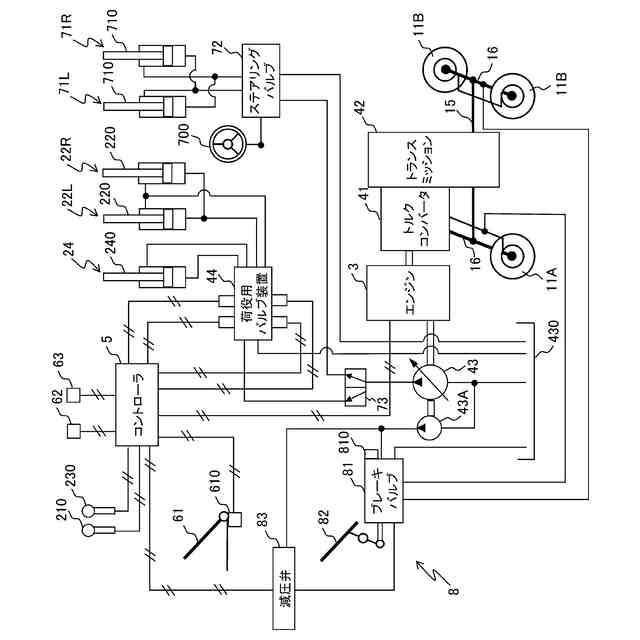
ホイールローダの駆動システムの一構成例を示すシステム構成図である。
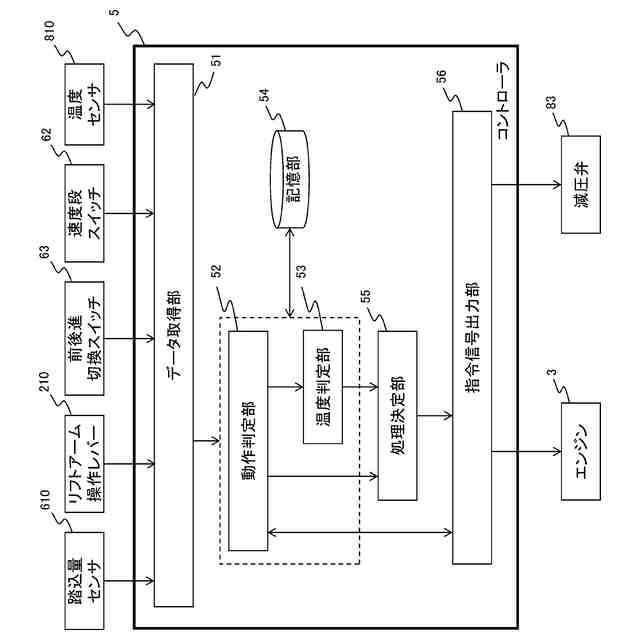
コントローラが有する機能を示す機能ブロック図である。
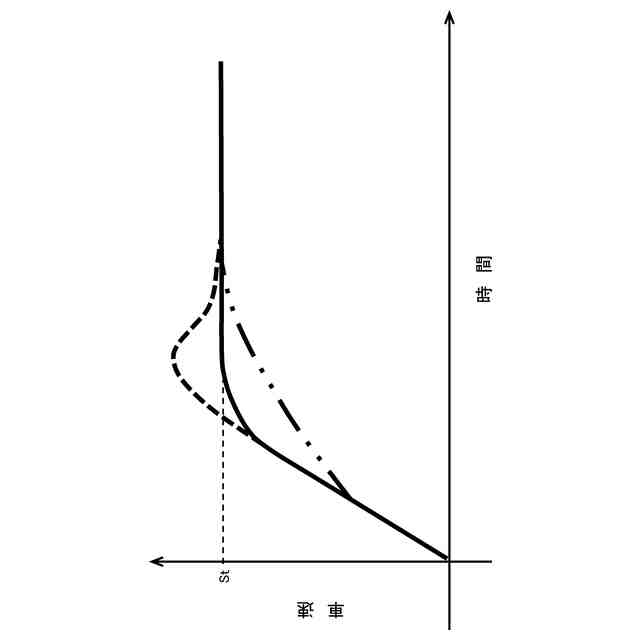
ブレーキ圧の立ち上がりと車速の時間推移との関係を示すグラフである。
コントローラの制御内容を時系列で説明する説明図である。
コントローラで実行される処理の流れを示すフローチャートである。
【発明を実施するための形態】
【0010】
<ホイールローダ1の全体構成>
まず、本発明の実施形態に係るホイールローダ1の全体構成について、図1を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
鹿島建設株式会社
接続方法
1日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
建設機械
14日前
日本車輌製造株式会社
杭打機の表示システム
16日前
ナブテスコ株式会社
ドーザブレード駆動機構
13日前
株式会社大林組
免震構造及び免震構造の施工方法
16日前
個人
保護カバー及び保護カバーの取付方法
16日前
個人
斜面保護構造、及び、斜面保護構造施工方法
13日前
住友重機械工業株式会社
作業機械用の遠隔操作システム
13日前
鹿島建設株式会社
生態系環境改善部材及び生態系環境改善構造
13日前
住友重機械工業株式会社
ショベル、ショベルの操作システム
8日前
大成建設株式会社
地盤計測システム
13日前
ヤンマーホールディングス株式会社
作業機械
13日前
ヤンマーホールディングス株式会社
作業機械
13日前
ヤンマーホールディングス株式会社
作業機械
13日前
清水建設株式会社
地中連続壁の終局せん断耐力算定方法
13日前
キャタピラー エス エー アール エル
作業支援装置および作業機械
14日前
株式会社中大
樋門部の可撓矢板壁の構築方法
15日前
株式会社エンバイン
取付具、壁面パネルの交換方法及び壁面パネルの取付方法
6日前
個人
載置ブロック、防草構造体、及び防草構造体の施工方法
16日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
13日前
日鉄エンジニアリング株式会社
防舷構造物、水域構造物及び交換方法
14日前
清水建設株式会社
打設監視システム、ガイド装置、および打設監視方法
13日前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
14日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
13日前
東亜建設工業株式会社
閉鎖機構および上部工の構築方法
13日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
13日前
トプコン ポジショニング システムズ, インク.
土工機械における周期的動作の自動制御方法
15日前
学校法人明治大学
GLP-1分泌促進用組成物
13日前
公立大学法人名古屋市立大学
換気困難予測装置、換気困難予測方法、及びプログラム
15日前
株式会社アドバンテスト
乳酸閾値導出装置、方法、プログラム、記録媒体
16日前
他の特許を見る

 特許ウォッチ
特許ウォッチ