TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025166671
公報種別
公開特許公報(A)
公開日
2025-11-06
出願番号
2024070848
出願日
2024-04-24
発明の名称
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
出願人
株式会社小松製作所
代理人
弁理士法人深見特許事務所
主分類
E02F
9/26 20060101AFI20251029BHJP(水工;基礎;土砂の移送)
要約
【課題】交換後のバケットの重心位置を簡易に算出可能な作業機械のペイロード算出システムと作業機械のペイロード算出方法を提供する。
【解決手段】コントローラ10は、バケット43の重心BGがアームトップピン49の直下に位置した直下状態におけるバケット43の重心角θ
G
と、バケット43の掘削姿勢におけるバケット対地角θ
dig
、ペイロード値W
dig
およびブームシリンダ44のトルクT
dig
と、バケット43のダンプ姿勢におけるバケット対地角θ
dump
、ペイロード値W
dump
およびブームシリンダ44のトルクT
dump
とを用いてバケット43の重心BGの座標を算出する。
【選択図】図4
特許請求の範囲
【請求項1】
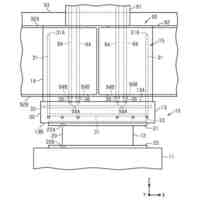
ブームと、前記ブームに回転可能に取り付けられたアームと、前記アームにアームトップピンにて回転可能に取り付けられたバケットと、前記ブームを駆動するブームシリンダとを有する作業機と、
前記バケットの重心が前記アームトップピンの直下に位置した直下状態における前記バケットの重心角と、前記バケットの掘削姿勢における第1バケット対地角、第1ペイロード値および前記ブームシリンダの第1トルクと、前記バケットのダンプ姿勢における第2バケット対地角、第2ペイロード値および前記ブームシリンダの第2トルクとを用いて前記バケットの前記重心の座標を算出するコントローラと、を備える、作業機械のペイロード算出システム。
続きを表示(約 1,000 文字)
【請求項2】
角度センサをさらに備え、
前記コントローラは、前記角度センサの検出値から算出された前記バケットの回転角度に基づいて、前記重心角、前記第1バケット対地角、および前記第2バケット対地角を算出する、請求項1に記載の作業機械のペイロード算出システム。
【請求項3】
算出された前記バケットの前記重心の座標を記憶する、請求項1に記載の作業機械のペイロード算出システム。
【請求項4】
前記コントローラは、前記バケットの前記重心から前記ブームの回転中心までの距離を利用して前記第1トルクおよび前記第2トルクを求め、前記第1ペイロード値および前記第2ペイロード値を算出する、請求項1に記載の作業機械のペイロード算出システム。
【請求項5】
前記作業機は、前記アームに対して前記バケットを回転させるために伸縮するバケットシリンダをさらに有し、
前記コントローラは、前記バケットシリンダが伸長および収縮のいずれか一方のストロークエンドに達した状態を前記バケットの前記掘削姿勢として前記第1バケット対地角を算出する、請求項1に記載の作業機械のペイロード算出システム。
【請求項6】
前記コントローラは、前記バケットシリンダが伸長および収縮のいずれか他方のストロークエンドに達した状態を前記バケットの前記ダンプ姿勢として前記第2バケット対地角を算出する、請求項5に記載の作業機械のペイロード算出システム。
【請求項7】
ブームと、前記ブームに回転可能に取り付けられたアームと、前記アームにアームトップピンにて回転可能に取り付けられたバケットと、前記ブームを駆動するブームシリンダとを有する作業機を含む作業機械のペイロード算出方法であって、
前記バケットの重心が前記アームトップピンの直下に位置した直下状態で前記バケットの重心角を算出するステップと、
前記バケットの掘削姿勢において第1バケット対地角、第1ペイロード値および前記ブームシリンダの第1トルクを算出するステップと、
前記バケットのダンプ姿勢において第2バケット対地角、第2ペイロード値および前記ブームシリンダの第2トルクを算出するステップと、
前記重心角、前記第1バケット対地角、前記第1ペイロード値、前記第1トルク、前記第2バケット対地角、前記第2ペイロード値、および前記第2トルクを用いて前記バケットの前記重心の座標を算出するステップと、を備える、作業機械のペイロード算出方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械のペイロード算出システムおよび作業機械のペイロード算出方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
油圧ショベルなどの作業機械においてペイロードを算出する際に、バケットの重心位置が必要となる。バケットを交換した場合にバケットの重心位置が変わる場合がある。このためペイロードの算出のために交換後のバケットの重心位置を取得する必要がある。
【0003】
交換後のバケットの重心位置を取得することは、たとえば特開2021-152275号公報(特許文献1)に記載されている。特許文献1では、バケットを回動させて、バケットの自重による重心位置への力によるモーメントの腕の長さLwが最大となるバケットの回動角度γを探し、これによりバケットの重心位置が求められる。
【先行技術文献】
【特許文献】
【0004】
特開2021-152275号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら特許文献1には、ペイロードの算出についての記載は無い。また特許文献1では、長さLwが最大となる回動角度γを探す必要があるため、重心位置の算出が煩雑である。
【0006】
本開示の目的は、交換後のバケットの重心位置を簡易に算出可能な作業機械のペイロード算出システムと作業機械のペイロード算出方法を提供することである。
【課題を解決するための手段】
【0007】
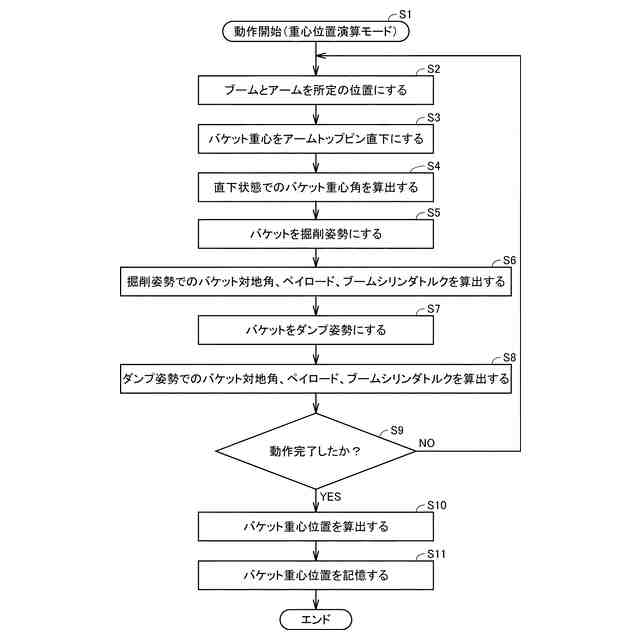
本開示における作業機械のペイロード算出システムは、作業機と、コントローラと、を備える。作業機は、ブームと、ブームに回転可能に取り付けられたアームと、アームにアームトップピンにて回転可能に取り付けられたバケットと、ブームを駆動するブームシリンダとを有する。コントローラは、バケットの重心がアームトップピンの直下に位置した直下状態におけるバケットの重心角と、バケットの掘削姿勢における第1バケット対地角、第1ペイロード値およびブームシリンダの第1トルクと、バケットのダンプ姿勢における第2バケット対地角、第2ペイロード値およびブームシリンダの第2トルクとを用いてバケットの重心の座標を算出する。
【0008】
本開示における作業機械のペイロード算出方法は、ブームと、ブームに回転可能に取り付けられたアームと、アームにアームトップピンにて回転可能に取り付けられたバケットと、ブームを駆動するブームシリンダとを有する作業機を含む作業機械のペイロード算出方法である。本開示における作業機械のペイロード算出方法は、以下のステップを有する。
【0009】
バケットの重心がアームトップピンの直下に位置した直下状態でバケットの重心角が算出される。バケットの掘削姿勢において第1バケット対地角、第1ペイロード値およびブームシリンダの第1トルクが算出される。バケットのダンプ姿勢において第2バケット対地角、第2ペイロード値およびブームシリンダの第2トルクが算出される。重心角、第1バケット対地角、第1ペイロード値、第1トルク、第2バケット対地角、第2ペイロード値、および第2トルクを用いてバケットの重心位置の座標が算出される。
【発明の効果】
【0010】
本開示によれば、交換後のバケットの重心位置を簡易に算出可能な作業機械のペイロード算出システムと作業機械のペイロード算出方法を実現することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社小松製作所
作業機械および方法
21日前
株式会社小松製作所
磁気結合型リアクトル
21日前
株式会社小松製作所
評価装置および評価方法
16日前
株式会社小松製作所
制御システムおよび制御方法
21日前
株式会社小松製作所
作業機械および作業機械の制御方法
8日前
株式会社小松製作所
作業機械および作業機械の制御方法
8日前
株式会社小松製作所
ファン駆動システム及びファン駆動方法
21日前
株式会社小松製作所
管理システム、管理装置、及び管理方法
今日
株式会社小松製作所
作業車両の制御装置および作業車両の制御方法
今日
株式会社小松製作所
作業現場の従事者支援システム及び従事者支援方法
21日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
21日前
株式会社小松製作所
作業機械の制御システム、および作業機械の制御方法
21日前
株式会社小松製作所
トレーニングシステムおよびステージデータの生成方法
21日前
株式会社小松製作所
作業機械のペイロード算出システムおよび作業機械のペイロード算出方法
22日前
株式会社小松製作所
管理システム及び管理方法
8日前
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
8日前
株式会社小松製作所
作業機械の動作条件決定システム、作業機械、及び作業機械の動作条件決定方法
8日前
株式会社小松製作所
消費電力予測装置、作業機械、消費電力予測システム、消費電力予測方法、およびプログラム
1日前
鹿島建設株式会社
接続方法
9日前
株式会社富田製作所
継手部構造
29日前
ウエダ産業株式会社
アタッチメント
今日
株式会社郷土開発
傾斜地の切土工法
8日前
日立建機株式会社
作業機械
21日前
株式会社クボタ
作業機
8日前
日立建機株式会社
建設機械
22日前
日本車輌製造株式会社
杭打機の表示システム
24日前
ナブテスコ株式会社
ドーザブレード駆動機構
21日前
株式会社大林組
掘削支援装置及び掘削支援方法
2日前
株式会社大林組
免震構造及び免震構造の施工方法
24日前
個人
保護カバー及び保護カバーの取付方法
24日前
ヤンマーホールディングス株式会社
作業機械
8日前
ヤンマーホールディングス株式会社
作業機械
8日前
個人
斜面保護構造、及び、斜面保護構造施工方法
21日前
日本製紙株式会社
紙製ドレーン
2日前
鹿島建設株式会社
生態系環境改善部材及び生態系環境改善構造
21日前
住友重機械工業株式会社
作業機械用の遠隔操作システム
21日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ